ARKitScenes: 苹果公司推出的大规模室内场景理解数据集
 Ray
RayARKitScenes:推动室内场景理解的前沿
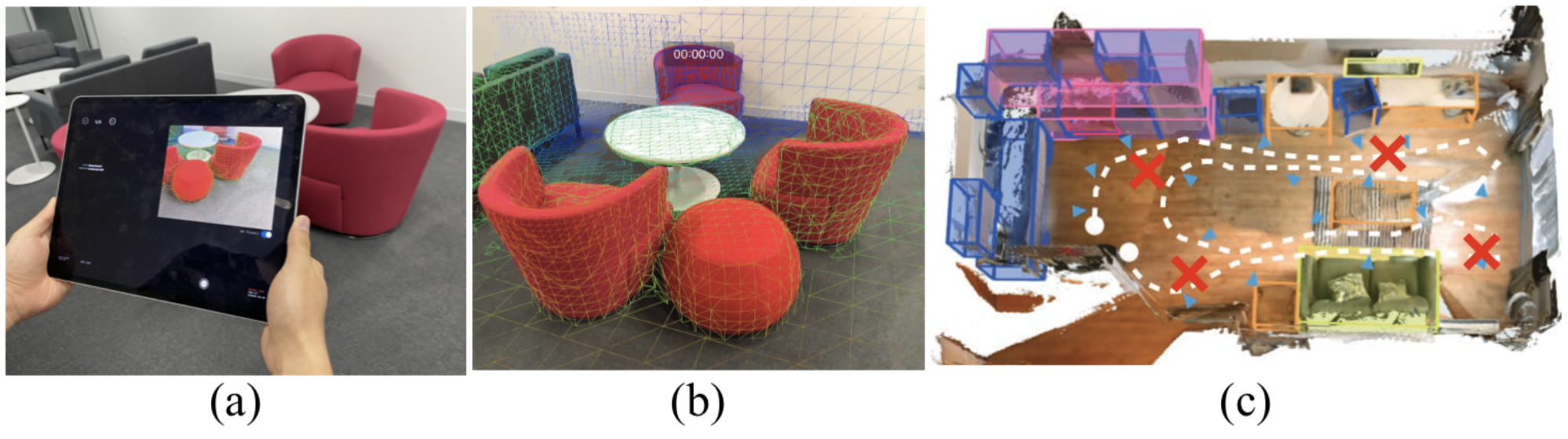
随着增强现实技术的快速发展,对室内场景的精确理解变得越来越重要。为了推动这一领域的研究进展,苹果公司最近发布了一个名为ARKitScenes的大规模数据集。这个数据集不仅是首个使用广泛可用的苹果LiDAR扫描仪捕获的RGB-D数据集,更是迄今为止最大的室内场景理解数据集。让我们深入了解一下这个数据集的特点和潜在影响。
数据集概览
ARKitScenes数据集包含了5,047次扫描,涵盖了1,661个独特的室内场景。这些数据是使用配备LiDAR扫描仪的iPad Pro设备采集的,包括以下主要内容:
- 原始和处理后的RGB-D图像数据
- 相机姿态估计
- ARKit场景重建结果
- 高分辨率深度图(使用固定激光扫描仪捕获)
- 大量家具的手动标注3D定向边界框
这个数据集的规模和多样性使其成为研究人员和开发者的宝贵资源。它不仅可以用于训练和评估各种室内场景理解算法,还可以帮助开发更加鲁棒和通用的模型。
数据集的独特优势
与之前的RGB-D数据集相比,ARKitScenes具有以下几个显著优势:
-
先进的数据采集设备: 使用配备LiDAR扫描仪的iPad Pro,可以获得高质量的深度信息和精确的相机轨迹。
-
大规模和多样性: 包含了大量不同类型的室内场景,增强了模型的泛化能力。
-
丰富的标注: 提供了详细的3D物体边界框标注,有助于物体检测和场景分割任务。
-
多模态数据: 除了RGB-D数据,还包括场景重建和高分辨率深度图,支持多种研究方向。
-
易于访�问: 苹果公司提供了便捷的数据下载和处理脚本,降低了研究者的使用门槛。
潜在应用场景
ARKitScenes数据集的发布为多个研究方向提供了新的可能性:
-
3D物体检测: 利用丰富的3D边界框标注,可以开发更加准确的室内物体检测算法。
-
深度图上采样: 结合低分辨率深度图和高分辨率RGB图像,研究深度图上采样技术。
-
场景重建: 基于ARKit重建结果,探索更精细和完整的3D场景重建方法。
-
语义分割: 利用多模态数据,提高室内场景的语义分割精度。
-
SLAM: 研究更加鲁棒的同时定位与地图构建(SLAM)算法。
数据集的使用方法
为了方便研究人员使用ARKitScenes数据集,苹果公司在GitHub上提供了详细的文档和工具:
-
数据下载: 使用提供的
download_data.py脚本可以方便地下载所需的数据子集。 -
数据格式: 数据集包含多种文件格式,如PNG图像、JSON标注文件、PLY网格文件等。
-
示例任务: 提供了3D物体检测和深度图上采样两个下游任务的示例代码。
-
数据可视化: 包含了数据可视化和处理的辅助脚本。
研究者可以根据自己的需求,灵活地使用这些工具来开展研究工作。
结语
ARKitScenes的发布标志着室内场景理解研究进入了一个新的阶段。这个数据集不仅为学术研究提供了宝贵的资源,也为AR应用开发者提供了训练和测试算法的平台。随着更多研究者和开发者的加入,我们有理由相信,基于这个数据集的研究将推动室内场景理解技术的快速进步,为未来更加智能和自然的AR体验铺平道路。
苹果公司的这一举措也体现了其对开放研究的支持。通过共享这样的大规模数据集,苹果不仅推动了整个行业的发展,也为自身的AR技术积累了宝贵的经验。我们期待看到更多基于ARKitScenes的创新研究成果,以及这些成果如何转化为实际的AR应用,为用户带来更加丰富和智能的交互体验。
编辑推荐精选


ai-agents-for-beginners
10 节课教你开启构建 AI 代理所需的一切知识
AI Agents for Beginners 是一个专为初学者打造的课程项目,提供 10 节课程,涵盖构建 AI 代理的必备知识,支持多种语言,包含规划设计、工具使用、多代理等丰富内容,助您快速入门 AI 代理领域。

AEE
AI Excel全自动制表工具
AEE 在线 AI 全自动 Excel 编辑器,提供智能录入、自动公式、数据整理、图表生成等功能,高效处理 Excel 任务,提升办公效率。支持自动高亮数据、批量计算、不规则数据录入,适用于企业、教育、金融等多场景。


UI-TARS-desktop
基于 UI-TARS 视觉语言模型的桌面应用,可通过自然语言控制计算机进行多模态操作。
UI-TARS-desktop 是一款功能强大的桌面应用,基于 UI-TARS(视觉语言模型)构建。它具备自然语言控制、截图与视觉识别、精确的鼠标键盘控制等功能,支持跨平台使用(Windows/MacOS),能提供实时反馈和状态显示,且数据完全本地处理,保障隐私安全。该应用集成了多种大语言模型和搜索方式,还可进行文件系统操作。适用于需要智能交互和自动化任务的场景,如信息检索、文件管理等。其提供了详细的文档,包括快速启动、部署、贡献指南和 SDK 使用说明等,方便开发者使用和扩展。


Wan2.1
开源且先进的大规模视频生成模型项目
Wan2.1 是一个开源且先进的大规模视频生成模型项目,支持文本到图像、文本到视频、图像到视频等多种生成任务。它具备丰富的配置选项,可调整分辨率、扩散步数等参数,还能对提示词进行增强。使用了多种先进技术和工具,在视频和图像生成领域具有广泛应用前景,适合研究人员和开发者使用。


爱图表
全流程 AI 驱动的数据可视化工具��,助力用户轻松创作高颜值图表
爱图表(aitubiao.com)就是AI图表,是由镝数科技推出的一款创新型智能数据可视化平台,专注于为用户提供便捷的图表生成、数据分析和报告撰写服务。爱图表是中国首个在图表场景接入DeepSeek的产品。通过接入前沿的DeepSeek系列AI模型,爱图表结合强大的数据处理能力与智能化功能,致力于帮助职场人士高效处理和表达数据,提升工作效率和报告质量。


Qwen2.5-VL
一款强大的视觉语言模型,支持图像和视频输入
Qwen2.5-VL 是一款强大的视觉语言模型,支持图像和视频输入,可用于多种场景,如商品特点总结、图像文字识别等。项目提供了 OpenAI API 服务、Web UI 示例等部署方式,还包含了视觉处理工具,有助于开发者快速集成和�使用,提升工作效率。


HunyuanVideo
HunyuanVideo 是一个可基于文本生成高质量图像和视频的项目。
HunyuanVideo 是一个专注于文本到图像及视频生成的项目。它具备强大的视频生成能力,支持多种分辨率和视频长度选择,能根据用户输入的文本生成逼真的图像和视频。使用先进的技术架构和算法,可灵活调整生成参数,满足不同场景的需求,是文本生成图像视频领域的优质工具。


WebUI for Browser Use
一个基于 Gradio 构建的 WebUI,支持与浏览器智能体进行便捷交互。
WebUI for Browser Use 是一个强大的项目,它集成了多种大型语言模型,支持自定义浏览器使用,具备持久化浏览器会话等功能。用户可以通过简洁友好的界面轻松控制浏览器智能体完成各类任务,无论是数据提取、网页导航还是表单填写等操作都能高效实现,有利于提高工作效率和获取信息的便捷性。该项目适合开发者、研究人员以及需要自动化浏览器操作的人群使用,在 SEO 优化方面,其关键词涵盖浏览器使用、WebUI、大型语言模型集成等,有助于提高网页在搜索引擎中的曝光度。


xiaozhi-esp32
基于 ESP32 的小智 AI 开发项目,支持多种网络连接与协议,实现语音交互等功能。
xiaozhi-esp32 是一个极具创新性的基于 ESP32 的开发项目,专注于人工智能语音交互领域。项目涵盖了丰富的功能,如网络连接、OTA 升级、设备激活等,同时支持多种语言。无论是开发爱好者还是专业开发者,都能借助该项目快速搭建起高效的 AI 语音交互系统,为智能设备开发提供强大助力。


olmocr
一个用于 OCR 的项目,支持多种模型和服务器进行 PDF 到 Markdown 的转换,并提供测试和报告功能。
olmocr 是一个专注于光学字符识别(OCR)的 Python 项目,由 Allen Institute for Artificial Intelligence 开发。它支持多种模型和服务器,如 vllm、sglang、OpenAI 等,可将 PDF 文件的页面转换为 Markdown 格式。项目还提供了测试框架和 HTML 报告生成功能,方便用户对 OCR 结果进行评估和分析。适用于科研、文档处理等领域,有助于提高工作效率和准确性。
推荐工具精选







AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号