Walk These Ways: 突破四足机器人运动控制的新范式
 Ray
Ray引言
四足机器人因其优秀的移动能力和适应性,在工业、军事和救援等领域具有广阔的应用前景。然而,如何实现灵活多变、适应复杂环境的运动控制一直是该领域的重要挑战。近日,由麻省理工学院(MIT)的Gabriel B. Margolis和Pulkit Agrawal领导的研究团队提出了一种突破性的方法 - Walk These Ways,为解决这一难题带来了新的希望。
Walk These Ways: 多样化行为的运动控制
Walk These Ways是一个基于强化学习的四足机器人运动控制系统。它的核心理念是通过"多样化行为"(Multiplicity of Behavior, MoB)的训练方法,使机器人能够学习和执行多种不同的步态和动作。这种方法不同于传统的单一目标优化,而是同时训练机器人完成多个不同的运动任务,从而获得更加灵活和通用的运动能力。
主要特点
-
多样化步态: Walk These Ways可以执行多种步态,包括不同的脚步摆动、姿势和速度。这使得机器人能够适应各种地形和任务需求。
-
任务多样性: 系统可以完成多种下游任务,如蹲伏、跳跃、高速奔跑、爬楼梯、抵抗推搡和节奏舞蹈等。这种多样性大大扩展了四足机器人的应用范围。
-
开源框架: 项目提供了完整的开源代码和文档,包括仿真训练环境和实物部署工具,方便研究人员进行二次开发和研究。
-
高效训练: 利用NVIDIA的Isaac Gym仿真器和PPO算法,实现了高效的并行训练。
-
域随机化: 采用域随机化技术,提高了模型在实际环境中的鲁棒性。
技术实现
仿真训练
Walk These Ways的�训练过程主要在仿真环境中完成。研究团队使用了NVIDIA的Isaac Gym物理仿真器,该仿真器支持GPU加速,可以高效地并行模拟大量环境实例。训练算法采用了近年来广受欢迎的PPO(Proximal Policy Optimization)算法,这是一种稳定高效的策略梯度方法。
训练过程中,研究人员设计了一系列奖励函数来引导机器人学习多样化的行为。这些奖励不仅考虑了基本的运动指标(如速度和稳定性),还包括了特定任务的目标(如跳跃高度、爬楼梯成功率等)。通过精心设计的奖励函数,Walk These Ways能够在单一策略中融合多种行为能力。
域随机化
为了提高模型在实际环境中的泛化能力,研究团队采用了域随机化技术。在训练过程中,系统会随机改变仿真环境的各种参数,如地面摩擦系数、机器人质量分布、关节阻尼等。这种做法能够帮助模型学习更加鲁棒的控制策略,从而更好地适应实际环境中的不确定性。
实物部署
Walk These Ways项目不仅提供了仿真训练环境,还开发了完整的实物部署工具链。该工具链支持将训练好的模型部署到Unitree公司的Go1 Edu四足机器人上。部署过程包括以下几个关键步骤:
-
环境准备: 使用Docker容器封装了所有必要的依赖和运行时环境,简化了部署流程。
-
模型转换: 提供了将仿真训练模型转换为实物控制器的工具。
-
低级控制: 利用Unitree的SDK实现了对机器人关节的低级控制,保证了控制的精确性和实时性。
-
安全机制: 实现了多层安全保护机制,包括软件限位和紧急停止功能,确保实验过程的安全性。
-
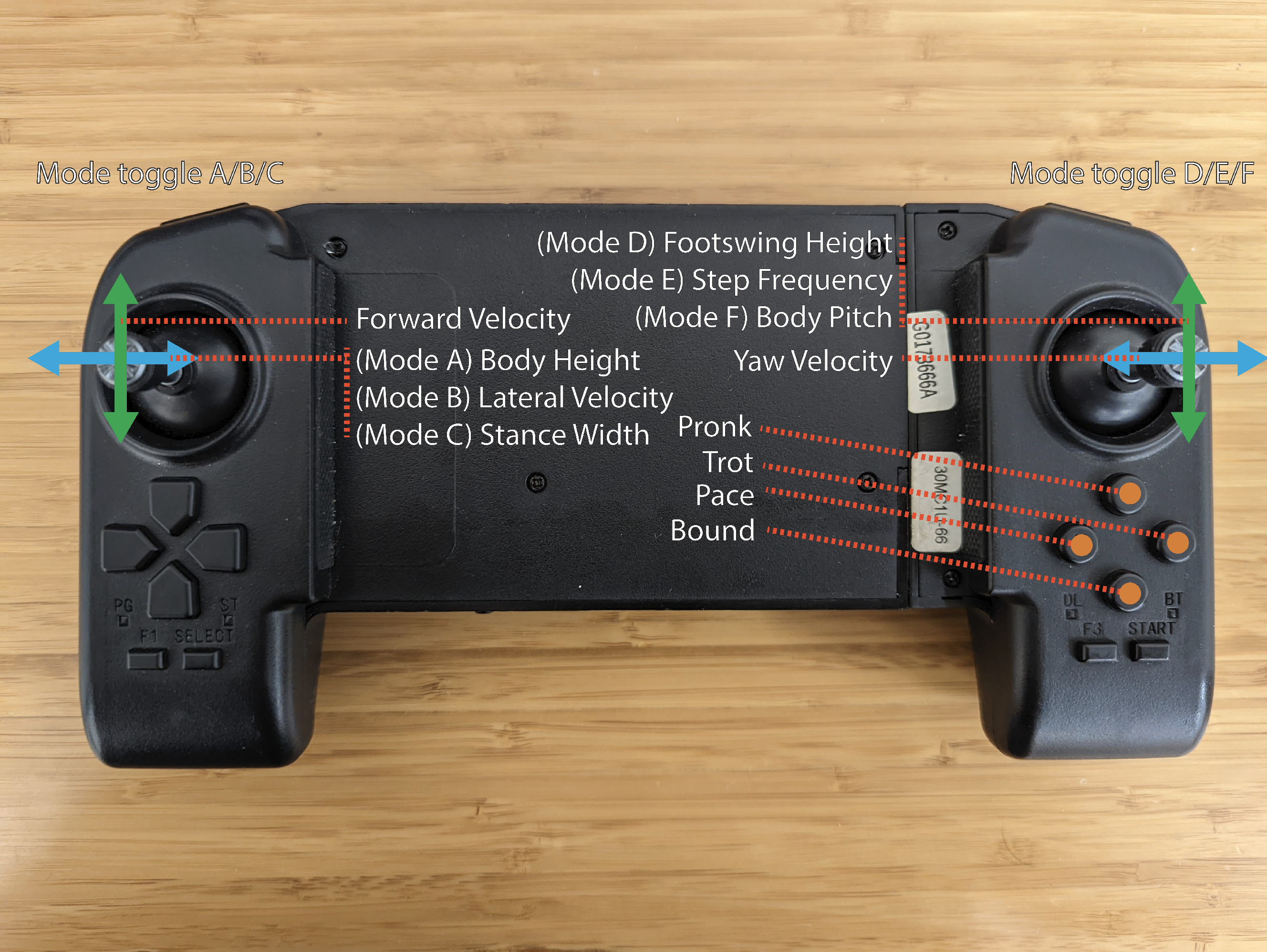
遥控接口: 开发了直观的遥控器映射,方便操作员控制机器人的行为。
应用前景
Walk These Ways的成功为四足机器人的应用开辟了新的可能性。以下是一些潜在的应用领域:
-
搜索与救援: 灵活的运动能力使机器人能够在复杂地形中快速移动,有助于在灾难现场进行搜索和救援任务。
-
工业检测: 多样化的步态使机器人能够适应各种工业环境,如管道、桥梁或高空结构的检测。
-
军事应用: 高速奔跑和抗干扰能力使其在军事侦察和物资运输等任务中具有优势。
-
娱乐表演: 节奏舞蹈等特殊动作为机器人在娱乐行业的应用提供了可能。
-
科研平台: 作为开源项目,Walk These Ways为机器人学习和控制领域的研究人员提供了宝贵的实验平台。
未来展望
尽管Walk These Ways已经取得了显著的成果,但四足机器人的运动控制仍有很大的发展空间。未来的研究方向可能包括:
-
更复杂的环境适应: 进一步提高机器人在极端天气、复杂地形等条件下的适应能力。
-
与其他AI技术的结合: 将运动控制与计算机视觉、自然语言处理等技术结合,实现更智能的自主行为。
-
能耗优化: 研究如何在保持性能的同时降低能耗,延长机器人的工作时间。
-
多机器人协作: 探索多个四足机器人协同工作的控制策略。
-
实时学习与适应: 开发能够在实际运行过程中持续学习和调整的控制算法。
结论
Walk These Ways项目为四足机器人的运动控制带来了革命性的突破。通过多样化行为训练和先进的仿真技术,该系统实现了前所未有的灵活性和适应性。作为一个开源项目,它不仅推动了学术研��究的发展,还为四足机器人在实际应用中的推广铺平了道路。随着技术的不断进步,我们有理由相信,更加智能和高效的四足机器人将在不久的将来成为现实,为人类社会带来更多便利和可能性。
编辑推荐精选

AEE
AI Excel全自动制表工具
AEE 在线 AI 全自动 Excel 编辑器,提供智能录入、自动公式、数据整理、图表生成等功能,高效处理 Excel 任务,提升办公效率。支持自动高亮数据、批量计算、不规则数据录入,适用于企业、教育、金融等多场景。


UI-TARS-desktop
基于 UI-TARS 视觉语言模型的桌面应用,可通过自然语言控制计算机进行多模态操作。
UI-TARS-desktop 是一款功能强大的桌面应用,基于 UI-TARS(视觉语言模型)构建。它具备自然语言控制、截图与视觉识别、精确的鼠标键盘控制等功能,支持跨平台使用(Windows/MacOS),能提供实时反馈和状态显示,且数据完全本地处理,保障隐私安全。该应用集成了多种大语言模型和搜索方式,还可进行文件系统操作。适用于需要智能交互和自动化任务的场景,如信息检索、文件管理等。其提供了详细的文档,包括快速启动、部署、贡献指南和 SDK 使用说明等,方便开发者使用和扩展。


Wan2.1
开源且先进的大规模视频生成模型项目
Wan2.1 是一个开源且先进的大规模视频生成模型项目,支持文本到图像、文本到视频、图像到视频等多种生成任务。它具备丰富的配置选项,可调整分辨率、扩散步数等参数,还能对提示词进行增强。使用了多种先进技术和工具,在视频和图像生成领域具有广泛应用前景,适合研究人员和开发者使用。


爱图表
全流程 AI 驱动的数据可视化工具,助力用户轻松创作高颜值图表
爱图表(aitubiao.com)就是AI图表,是由镝数科技推出的一款创新型智能数据可视化平台,专注于为用户提供便捷的图表生成、数据分析和报告撰写服务。爱图表是中国首个在图表场景接入DeepSeek的产品。通过接入前沿的DeepSeek系列AI模型,爱图表结合强大的数据处理能力与智能化功能,致力于帮助职场人士高效处理和表达数据,提升工作效率和报告质量。


Qwen2.5-VL
一款强大的视觉语言模型,支持图像和视频输入
Qwen2.5-VL 是一款强大的视觉语言模型,支持图像和视频输入,可用于多种场景,如商品特点总结、图像文字识别等。项目提供了 OpenAI API 服务、Web UI 示例等部署方式,还包含了视觉处理工具,有助于开发者快速集成和使用,提升工作效率。


HunyuanVideo
HunyuanVideo 是一个可基于文本生成高质量图像和视频的项目。
HunyuanVideo 是一个专注于文本到图像及视频生成的项目。它具备强大的视频生成能力,支持多种分辨率和视频长度选择,能根据用户输入的文本生成逼真的图像和视频。使用先进的技术架构和算法,可灵活调整生成参数,满足不同场景的需求,是文本生成图像视频领域的优质工具。


WebUI for Browser Use
一个基于 Gradio 构建的 WebUI,支持与浏览器智能体进行便捷交互。
WebUI for Browser Use 是一个强大的项目,它集成了多种大型语言模型,支持自定义浏览器使用,具备持久化浏览器会话等功能。用户可以通过简洁友好的界面轻松控制浏览器智能体完成各类任务,无论是数据提取、网页导航还是表单填写等操作都能高效实现,有利于提高工作效率和获取信息的便捷性。该项目适合开发者、研究人员以及需要自动化浏览器操作的人群使用,在 SEO 优化方面,其关键词涵盖浏览器使用、WebUI、大型语言模型集成等,有助于提高网页在搜索引擎中的曝光度。


xiaozhi-esp32
基于 ESP32 的小智 AI 开发项目,支持多种网络连接与协议,实现语音交互等功能。
xiaozhi-esp32 是一个极具创新性的基于 ESP32 的开发项目,专注于人工智能语音交互领域。项目涵盖了丰富的功能,如网络连接、OTA 升级、设备激活等,同时支持多种语言。无论是开发爱好者还是专业开发者,都能借助该项目快速搭建起高效的 AI 语音交互系统,为智能设备开发提供强大助力。


olmocr
一个用于 OCR 的项目,支持多种模型和服务器进行 PDF 到 Markdown 的转换,并提供测试和报告功能。
olmocr 是一个专注于光学字符识别(OCR)的 Python 项目,由 Allen Institute for Artificial Intelligence 开发。它支持多种模型和服务器,如 vllm、sglang、OpenAI 等,可将 PDF 文件的页面转换为 Markdown 格式。项目还提供了测试框架和 HTML 报告生成功能,方便用户对 OCR 结果进行评估和分析。适用于科研、文档处理等领域,有助于提高工作效率和准确性。


飞书多维表格
飞书多维表格 ×DeepSeek R1 满血版
飞书多维表格联合 DeepSeek R1 模型,提供 AI 自动化解决方案,支持批量写作、数据分析、跨模态处理等功能,适用于电商、短视频、影视创作等场景,提升企业生产力与创作效率。关键词:飞书多维表格、DeepSeek R1、AI 自动化、批量处理、企业协同工具。
推荐工具精选







AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号