
计算机视觉简介
计算机视觉是人工智能和深度学习的一个重要分支,旨在赋予计算机理解和解释视觉世界的能力。它涉及从数字图像或视频中提取高层次信息,使机器能够"看"和"理解"周围的世界。近年来,随着深度学习技术的发展,计算机视觉取得了巨大进步,在诸多领域得到了广泛应用。
计算机视觉的工作原理
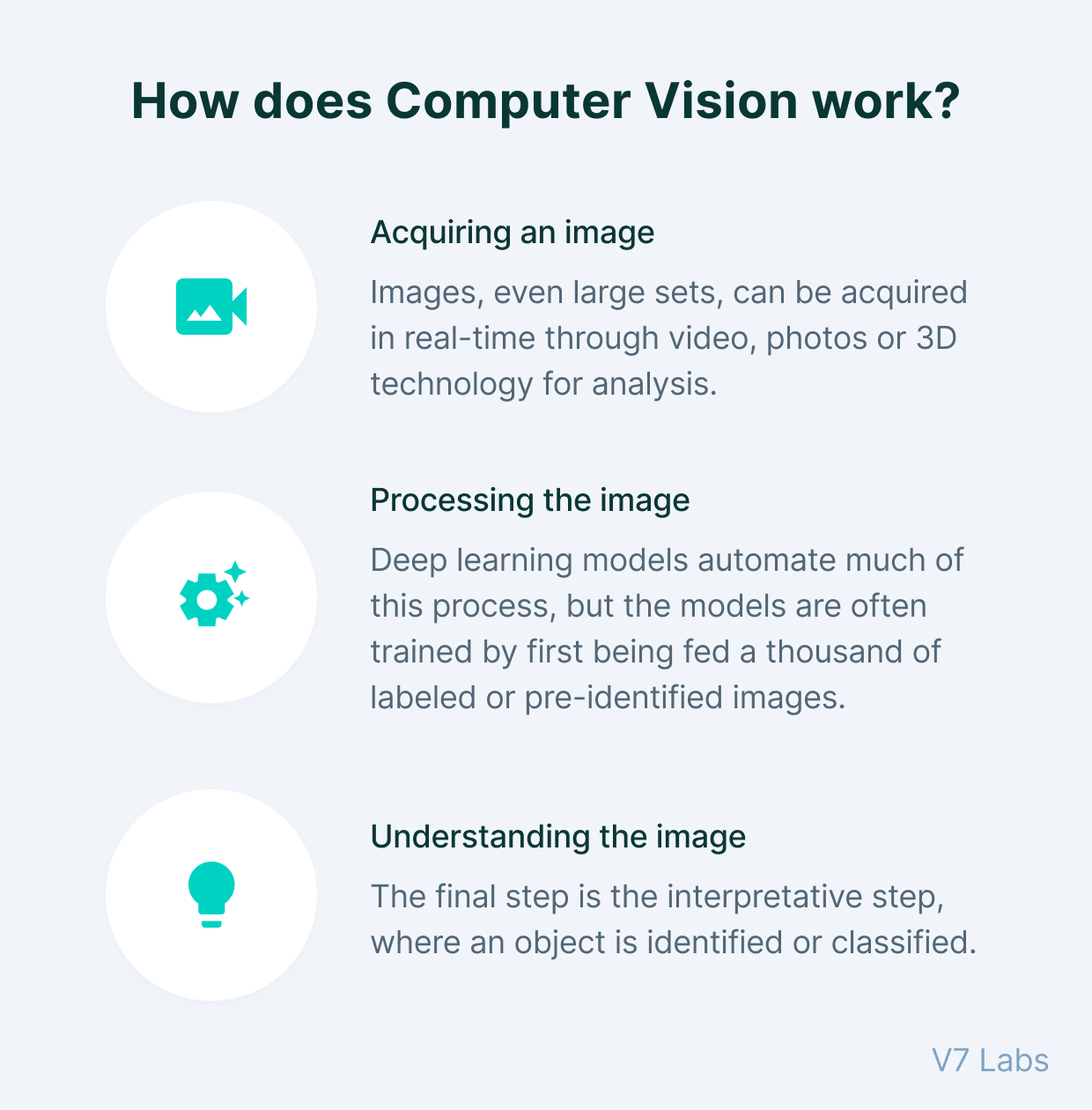
计算机视觉的基本工作流程可以概括为三个步骤:
- 图像获取:通过相机或传感器捕获数字图像或视频。
- 图像处理:对原始图像数据进行预处理和特征提取。
- 图像理解:利用机器学习算法对处理后的图像进行分析和解释。
在这个过程中,计算机需要处理大量的像素数据。每个像素都包含了红、绿、蓝三个通道的强度值,构成了一个庞大的数字矩阵。计算机视觉算法的任务就是从这些原始数据中提取有意义的特征和模式。
图像处理基础
图像处理是计算机视觉的基础,包括一系列对图像进行操作和分析的技术。以下是一些常见的图像处理操作:
图像读取与显示
使用OpenCV等库可以轻松读取和显示图像:
import cv2
# 读取图像
img = cv2.imread('image.jpg')
# 显示图像
cv2.imshow('Image', img)
cv2.waitKey(0)
图像裁剪与缩放
# 裁剪图像
cropped = img[100:300, 200:400]
# 缩放图像
resized = cv2.resize(img, (300, 200))
图像滤波
图像滤波可以用于去噪和平滑处理:
# 高斯滤波
blurred = cv2.GaussianBlur(img, (5, 5), 0)
# 中值滤波
median = cv2.medianBlur(img, 5)
边缘检测
Canny边缘检测是一种常用的边缘检测算法:
edges = cv2.Canny(img, 100, 200)
高级图像处理技术
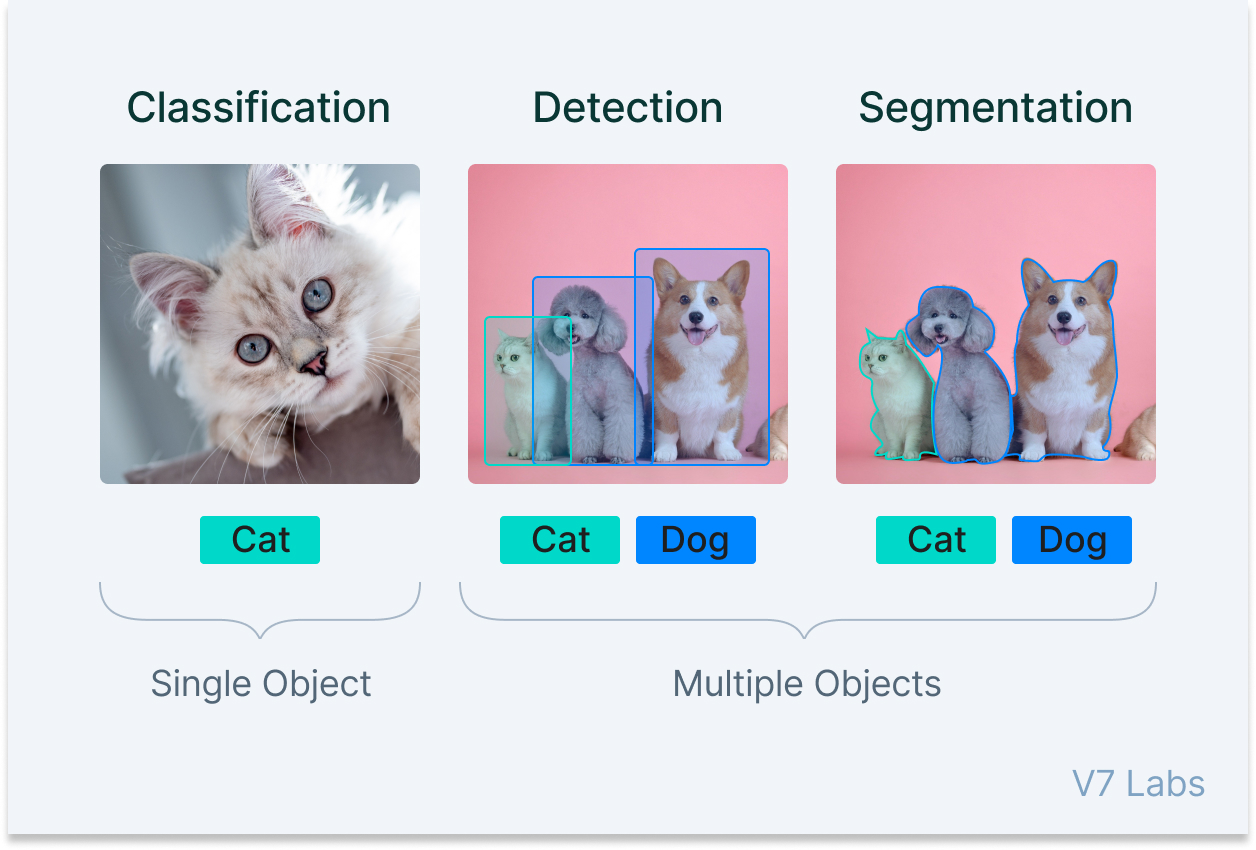
图像分割
图像分割是将图像分割成多个语义区域的过程。常用的分割算法包括:
- 基于阈值的分割
- 基于边缘的分割
- 基于区域的分割
- 基于深度学习的语义分割
特征提取
特征提取是从图像中提取有意义的特征,用于后续的图像分类或识别。常用的特征提取方法包括:
- SIFT (尺度不变特征变换)
- SURF (加速稳健特征)
- ORB (定向FAST和旋转BRIEF)
目标检测
目标检测旨在识别图像中的特定对象及其位置。常用的目标检测算法包括:
- R-CNN系列 (R-CNN, Fast R-CNN, Faster R-CNN)
- YOLO (You Only Look Once)
- SSD (Single Shot Detector)
计算机视觉的实际应用
计算机视觉技术在多个领域找到了广泛的应用:
- 自动驾驶:感知环境、识别道路标志和其他车辆。
- 医疗影像分析:辅助诊断疾病,如肺炎和癌症。
- 人脸识别:用于安全系统和身份验证。
- 工业检测:自动化产品质量控制。
- 增强现实(AR):将虚拟信息叠加到真实世界。
- 零售:无人商店和智能库存管理。
实践项目:文档扫描与OCR
为了展示计算机视觉的实际应用,我们可以实现一个简单的文档扫描和OCR(光学字符识别)项目。这个项目将包括以下步骤:
- 图像预处理:对拍摄的文档图像进行去噪和增强。
- 边缘检测:找出文档的轮廓。
- 透视变换:将倾斜的文档图像矫正为正面视图。
- 文本提取:使用OCR技术识别文档中的文字。
以下是部分实现代码:
import cv2
import numpy as np
import pytesseract
def preprocess_image(image):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
denoised = cv2.fastNlMeansDenoising(gray)
return denoised
def detect_edges(image):
edges = cv2.Canny(image, 50, 150)
return edges
def find_contours(edges):
contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
return sorted(contours, key=cv2.contourArea, reverse=True)[:5]
def get_document_contour(contours):
for contour in contours:
peri = cv2.arcLength(contour, True)
approx = cv2.approxPolyDP(contour, 0.02 * peri, True)
if len(approx) == 4:
return approx
return None
def perspective_transform(image, contour):
pts = contour.reshape(4, 2)
rect = np.zeros((4, 2), dtype="float32")
s = pts.sum(axis=1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
diff = np.diff(pts, axis=1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
(tl, tr, br, bl) = rect
widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
maxWidth = max(int(widthA), int(widthB))
heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightA), int(heightB))
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype="float32")
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
return warped
def ocr_text(image):
return pytesseract.image_to_string(image)
# 主函数
def scan_document(image_path):
image = cv2.imread(image_path)
processed = preprocess_image(image)
edges = detect_edges(processed)
contours = find_contours(edges)
doc_contour = get_document_contour(contours)
if doc_contour is not None:
warped = perspective_transform(image, doc_contour)
text = ocr_text(warped)
return warped, text
else:
return None, "No document found"
# 使用示例
scanned_image, extracted_text = scan_document('document.jpg')
if scanned_image is not None:
cv2.imshow('Scanned Document', scanned_image)
cv2.waitKey(0)
print("Extracted Text:")
print(extracted_text)
这个项目展示了如何将多个计算机视觉技术结合起来,实现一个实用的应用。通过这样的实践,我们可以更好地理解计算机视觉的工作原理和潜力。
结语
计算机视觉是一个快速发展的领域,不断为我们的生活带来新的可能。从基础的图像处理到复杂的深度学习模型,计算机视觉技术正在改变我们与世界互动的方式。通过不断学习和实践,我们可以掌握这些强大的工具,创造出更多令人惊叹的应用。
无论你是刚开始学习计算机视觉,还是想要深入研究某个特定领域,持续的学习和实践都是至关重要的。希望这篇文章能为你的计算机视觉之旅提供一个全面的指南,激发你进一步探索这个充满可能的领域。
🔗 相关资源:
继续学习,不断实践,相信你一定能在计算机视觉的世界中找到属于自己的精彩!









