
Dynablox简介
在当今快速发展的自主机器人领域,实时检测移动物体的能力对于机器人在动态环境中安全自主运行至关重要。为了解决这一关键挑战,来自苏黎世联邦理工学院自主系统实验室的研究团队开发了一种名为Dynablox的创新方法。
Dynablox是一种基于在线体积映射的方法,能够在复杂环境中实时检测各种动态物体。该方法的核心思想是通过增量方式构建环境的体积表示,并利用这种表示来识别和跟踪移动物体。与传统方法相比,Dynablox具有更高的鲁棒性和灵活性,能够适应各种复杂场景。
Dynablox的工作原理
Dynablox的工作流程主要包括以下几个步骤:
-
增量体积映射: 系统通过激光雷达等传感器持续获取环境点云数据,并将其整合到一个体积表示中。这种表示能够捕捉环境的几何结构和占用状态。
-
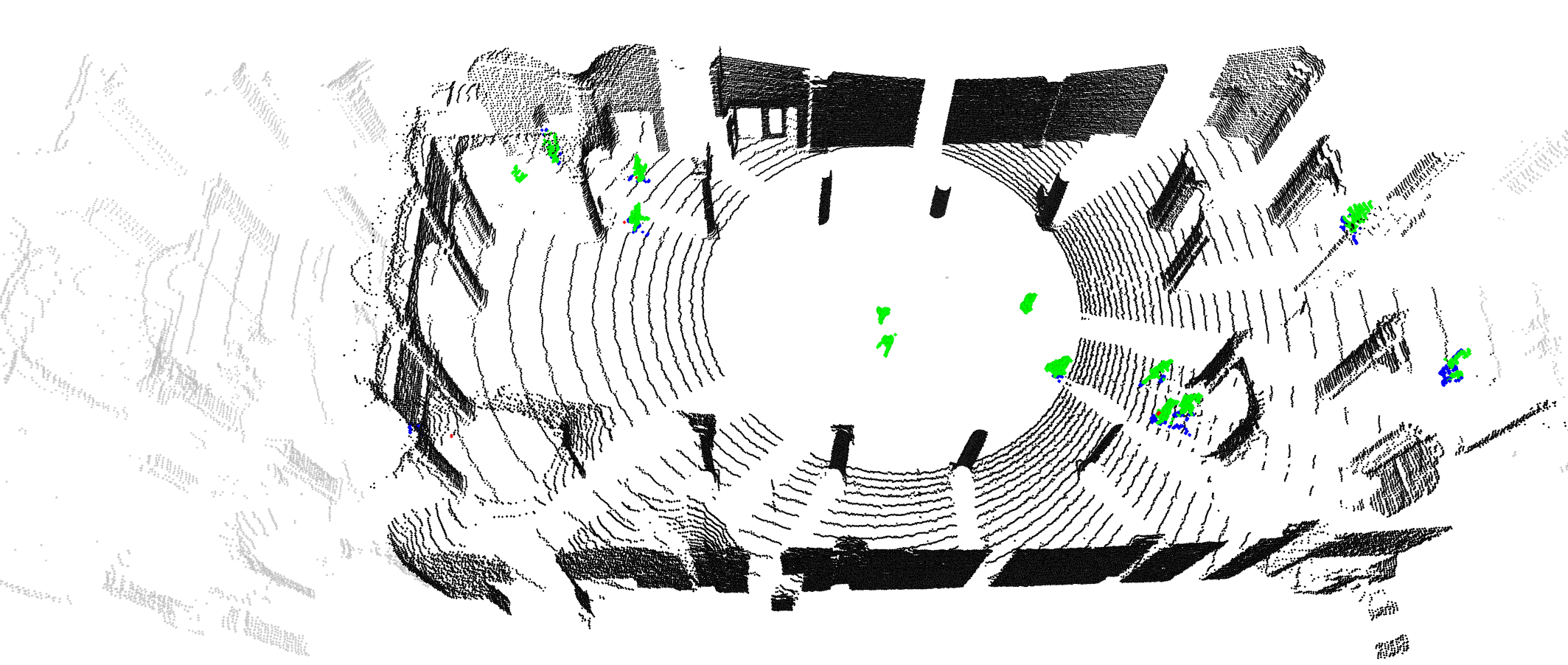
动态物体检测: 通过比较新获取的点云数据与现有体积表示,系统可以识别出与静态环境不一致的区域,这些区域很可能包含动态物体。
-
物体跟踪与分割: 对检测到的动态区域进行聚类和分割,从而识别出单个动态物体。系统还会对这些物体进行跟踪,以获取它们的运动信息。
-
实时更新: 随着新数据的不断输入,系统会持续更新体积表示和动态物体信息,确保检测结果的时效性和准确性。
Dynablox的主要特点
Dynablox具有以下几个突出特点,使其在动态物体检测领域脱颖而出:
-
实时性能: Dynablox能够在线实时处理传感器数据,快速检测和跟踪动态物体,满足自主机器人对实时性的严格要求。
-
适应复杂环境: 该方法在各种复杂环境中表现出色,包括室内、室外、拥挤场景等,显示出优秀的环境适应性。
-
多样化物体检测: Dynablox不局限于特定类型的物体,能够检测各种形状和大小的动态物体,如行人、车辆、动物等。
-
鲁棒性: 通过采用体积表示和增量更新策略,Dynablox对传感器噪声和遮挡具有较强的抵抗力。
-
无需先验知识: 该方法不依赖于预定义的物体模型或大量训练数据,具有很强的通用性。
Dynablox的应用场景
Dynablox在多个领域都有广泛的应用前景,包括但不限于:
-
自动驾驶: 帮助自动驾驶车辆实时检测周围的动态物体,提高行驶安全性。
-
服务机器人: 使室内服务机器人能够识别和避开移动的人和物体,提供更智能的服务。
-
无人机系统: 辅助无人机在复杂环境中进行导航和避障。
-
智能监控: 提升视频监控系统的动态物体检测能力,实现更精确的安全监控。
-
增强现实: 为AR应用提供实时的环境感知能力,提升用户体验。
Dynablox的实验评估
为了验证Dynablox的性能,研究团队进行了广泛的实验评估。实验使用了两个主要数据集:
-
Urban Dynamic Objects LiDAR (DOALS) Dataset: 这是一个在城市环境中收集的数据集,包含了各种动态物体。
-
Dynablox Dataset: 研究团队专门收集的数据集,涵盖了更多样化的动态物体和复杂场景。
实验结果显示,Dynablox在物体检测的精确度、召回率和IoU (交并比)等指标上都取得了优异的表现。例如,在DOALS数据集上,Dynablox达到了89.8%的平均IoU,99.3%的精确度和90.3%的召回率。
Dynablox的技术实现
Dynablox的实现主要基于ROS (Robot Operating System)框架,使用C++编程语言开发。主要的技术细节包括:
-
点云处理: 使用PCL (Point Cloud Library)进行点云数据的处理和分析。
-
体积表示: 采用八叉树(Octree)数据结构来高效地表示和更新环境的体积信息。
-
并行计算: 利用多线程和GPU加速技术提高计算效率,实现实时性能。
-
ROS集成: 与ROS生态系统紧密集成,便于在各种机器人平台上部署和使用。
Dynablox的未来发展
尽管Dynablox已经展现出了优秀的性能,但研究团队仍在持续改进和扩展这项技术。未来的发展方向包括:
-
提高处理速度: 进一步优化算法,以支持更高频率的传感器数据和更大规模的环境。
-
增强语义理解: 结合深度学习技术,为检测到的动态物体添加语义标签。
-
多传感器融合: 整合多种传感器数据(如相机、雷达等),提高检测的准确性和鲁棒性。
-
长期动态建模: 研究如何建立环境的长期动态模型,以适应不同时间尺度的变化。
-
与规划系统集成: 将Dynablox与机器人的运动规划和决策系统深度集成,实现更智能的行为。
结论
Dynablox作为一种创新的动态物体检测方法,为自主机器人在复杂动态环境中的安全导航提供了强有力的支持。其实时性能、环境适应性和多样化物体检测能力使其在自动驾驶、服务机器人等多个领域具有广阔的应用前景。随着技术的不断发展和完善,Dynablox有望成为推动自主机器人技术进步的重要力量,为构建更智能、更安全的机器人系统做出重要贡献。
开源社区的参与对Dynablox的发展至关重要。研究团队已将Dynablox的源代码开放在GitHub上(https://github.com/ethz-asl/dynablox),欢迎感兴趣的开发者和研究人员贡献代码、提出建议或报告问题。通过社区的共同努力,我们有望看到Dynablox在功能和性能上的进一步提升,为自主机器人领域带来更多创新和突破。









