
Far3D: 突破远程3D目标检测的新境界
远程3D目标检测(Far-field 3D Detection, Far3Det)是自动驾驶领域中一个至关重要但又充满挑战的任务。随着自动驾驶技术的不断发展,对远距离障碍物的精准检测变得愈发重要,尤其是对于高速行驶的车辆而言,远程检测能够为车辆提供充足的反应和制动距离。然而,传统的3D检测方法在远距离目标上往往表现不佳,这主要是由于远距离目标的特征稀疏、尺度小、遮挡严重等原因造成的。
为了解决这一难题,来自中国科学院自动化研究所的研究团队提出了一种名为Far3D的创新方法,旨在突破远程3D目标检测的瓶颈。该方法在AAAI 2024会议上发表,引起了学术界的广泛关注。Far3D通过一系列巧妙的设计,有效解决了远距离目标检测中的计算开销大、收敛不稳定等问题,在多个benchmark上取得了令人瞩目的成果。
Far3D的核心创新
Far3D的成功主要得益于以下几个关键创新:
- 稀疏查询框架
Far3D采用了一种新颖的稀疏查询框架。与直接扩展现有方法到远距离不同,Far3D利用高质量的2D目标先验来生成3D自适应查询,这些查询与3D全局查询相辅相成。这种设计大大减少了计算开销,同时保证了检测的准确性。
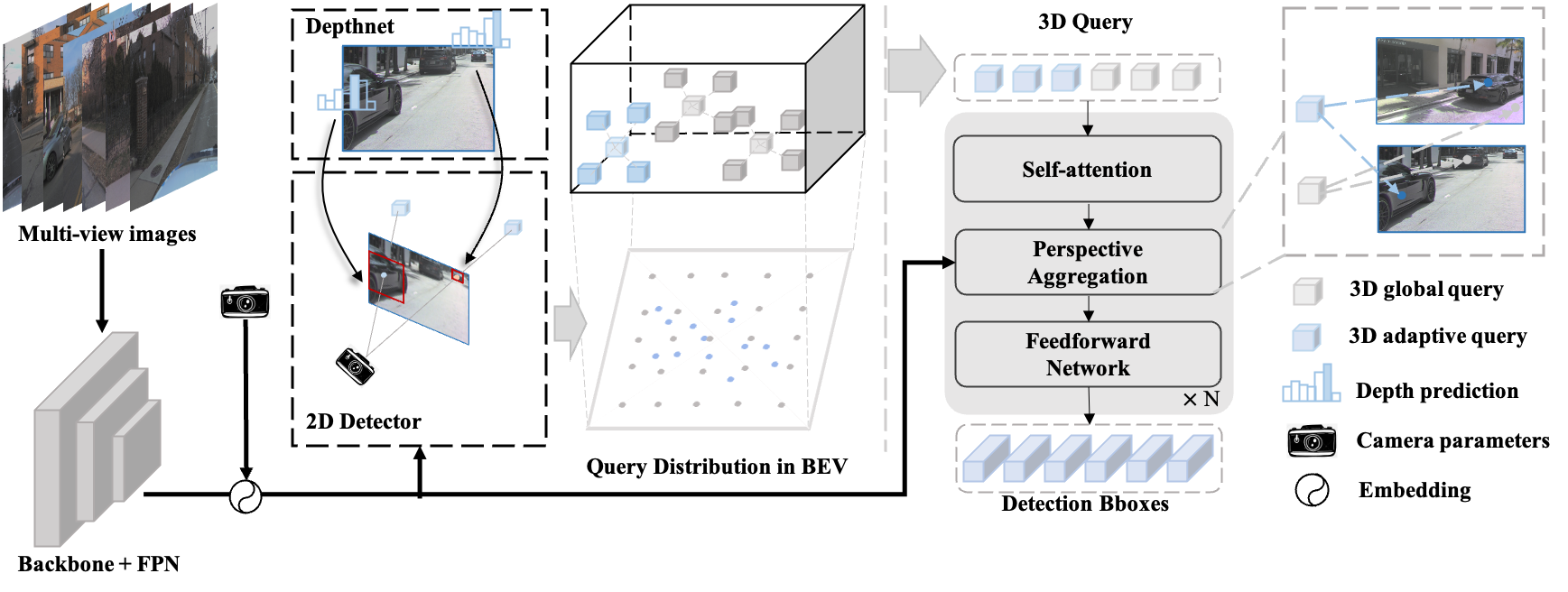
- 多视角特征聚合模块
为了有效捕获远距离目标在不同视角和尺度下的判别性特征,Far3D引入了一个视角感知的特征聚合模块。这个模块能够智能地整合来自多个相机的信息,从而提高远距离目标的检测性能。
- 范围调制3D降噪
为了解决查询错误传播和远程任务中的收敛问题,Far3D提出了一种范围调制的3D降噪方法。这种方法能够根据目标的距离动态调整降噪强度,有效提高了模型的稳定性和精度。
实验结果与性能评估
Far3D在多个具有挑战性的数据集上进行了广泛的实验,取得了优异的成绩:
- Argoverse 2 验证集
在Argoverse 2验证集上,Far3D以显著优势超越了现有方法:
| 模型 | 主干网络 | 输入尺寸 | mAP | CDS |
|---|---|---|---|---|
| BEVStereo | VoV-99 | (960, 640) | 0.146 | 0.104 |
| SOLOFusion | VoV-99 | (960, 640) | 0.149 | 0.106 |
| PETR | VoV-99 | (960, 640) | 0.176 | 0.122 |
| Sparse4Dv2 | VoV-99 | (960, 640) | 0.189 | 0.134 |
| StreamPETR | VoV-99 | (960, 640) | 0.203 | 0.146 |
| Far3D | VoV-99 | (960, 640) | 0.244 | 0.181 |
Far3D在mAP和CDS两个关键指标上都取得了显著提升,充分证明了其在远程3D目标检测任务上的优越性。
- nuScenes数据集
在nuScenes数据集的仅相机任务上,Far3D同样表现出色:
- mAP: 63.5
- NDS: 68.7
这一结果再次验证了Far3D在不同数据集和场景下的泛化能力。
Far3D的实际应用价值
Far3D的出色表现不仅仅体现在学术指标上,其在实际应用中也具有重要价值:
- 提高自动驾驶安全性
通过准确检测远距离目标,Far3D能够为自动驾驶系统提供更长的反应时间,从而大幅提高行车安全性。这对于高速行驶的场景尤为重要。
- 降低计算资源需求
Far3D的稀疏查询框架有效减少了计算开销,这意味着它可以在资源有限的嵌入式设备上运行,为自动驾驶系统的大规模部署铺平道路。
- 提升极端场景下的性能
Far3D在处理远距离、小尺度目标时表现出色,这使得它在雾天、夜间等视觉条件较差的极端场景下仍能保持稳定性能。
- 多传感器融合的基础
虽然Far3D主要针对相机数据进行优化,但其设计理念和方法也为未来与激光雷达等其他传感器的融合奠定了基础。
未来研究方向
尽管Far3D取得了显著成果,但在远程3D目标检测领域仍有多个值得探索的方向:
- 多模态融合
将Far3D的方法与激光雷达等其他传感器数据结合,有望进一步提升检测性能和鲁棒性。
- 实时性优化
虽然Far3D已经在计算效率上有所改进,但进一步提高其实时性仍是一个重要研究方向。
- 自适应远近目标处理
设计能够根据目标距离自动调整处理策略的算法,以在不同距离范围内都能保持高精度。
- 弱监督学习
探索利用少量标注数据和大量未标注数据来训练Far3D模型,以降低数据标注成本。
结论
Far3D为远程3D目标检测任务提供了一个强大而灵活的解决方案。通过创新的稀疏查询框架、多视角特征聚合和范围调制3D降噪等技术,Far3D有效克服了远距离目标检测中的诸多挑战。其在多个benchmark上的出色表现不仅推动了学术研究的进展,也为自动驾驶等实际应用场景提供了有力支持。
随着自动驾驶技术的不断发展和普及,Far3D这类专注于远程检测的算法将发挥越来越重要的作用。我们有理由相信,在Far3D的基础上,未来会涌现出更多创新的远程3D目标检测方法,进一步提升自动驾驶系统的安全性和可靠性。
参考资料
-
Jiang, X., Li, S., Liu, Y., Wang, S., Jia, F., Wang, T., ... & Zhang, X. (2023). Far3D: Expanding the Horizon for Surround-view 3D Object Detection. arXiv preprint arXiv:2308.09616.
-
Gupta, S., Kanjani, J., Li, M., Ferroni, F., Hays, J., Ramanan, D., & Kong, S. (2022). Far3Det: Towards Far-Field 3D Detection. arXiv preprint arXiv:2211.13858.
-
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Liong, V. E., Xu, Q., ... & Beijbom, O. (2020). nuScenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition (pp. 11621-11631).
-
Wilson, B., Qi, W., Agarwal, T., Lambert, J., Singh, J., Khandelwal, S., ... & Grundmann, M. (2021). Argoverse 2: Next generation datasets for self-driving perception and forecasting. In Thirty-fifth Conference on Neural Information Processing Systems Datasets and Benchmarks Track (Round 2).
通过Far3D的研究,我们看到了远程3D目标检测领域的巨大潜力和挑战。随着技术的不断进步,我们期待看到更多创新方法的涌现,推动自动驾驶技术向着更安全、更可靠的方向发展。Far3D无疑为这一领域的未来发展指明了一个富有前景的方向。









