GPT-Driver:AI驱动的自动驾驶新纪元
在自动驾驶技术日新月异的今天,一个名为GPT-Driver的创新项目正在为这个领域带来令人兴奋的突破。由研究人员Jiageng Mao、Yuxi Qian、Hang Zhao和Yue Wang共同开发的GPT-Driver,展示了如何将强大的GPT-3.5语言模型转化为高效可靠的自动驾驶运动规划器。这一突破性的研究不仅展现了大型语言模型(LLM)在复杂决策任务中的潜力,还为自动驾驶汽车的未来发展开辟了新的道路。
运动规划:自动驾驶的核心挑战
运动规划一直是自动驾驶技术中最具挑战性的环节之一。它要求系统能够在复杂多变的道路环境中,规划出安全、舒适且高效的行驶轨迹。传统的运动规划方法主要依赖于启发式算法,虽然在某些场景下表现不错,但面对新颖和未见过的驾驶情况时,往往显得力不从心。
GPT-Driver项目的研究人员提出了一个大胆而创新的想法:将运动规划问题重新构建为语言建模问题。这种全新的视角为解决复杂的运动规划难题提供了一个独特的切入点。
GPT-Driver:语言模型驱动的运动规划
GPT-Driver的核心思想是利用GPT-3.5模型强大的推理能力和泛化潜力来解决运动规划问题。研究团队提出了一种新颖的方法,将规划器的输入和输出都表示为语言标记,然后利用LLM通过坐标位置的语言描述来生成驾驶轨迹。
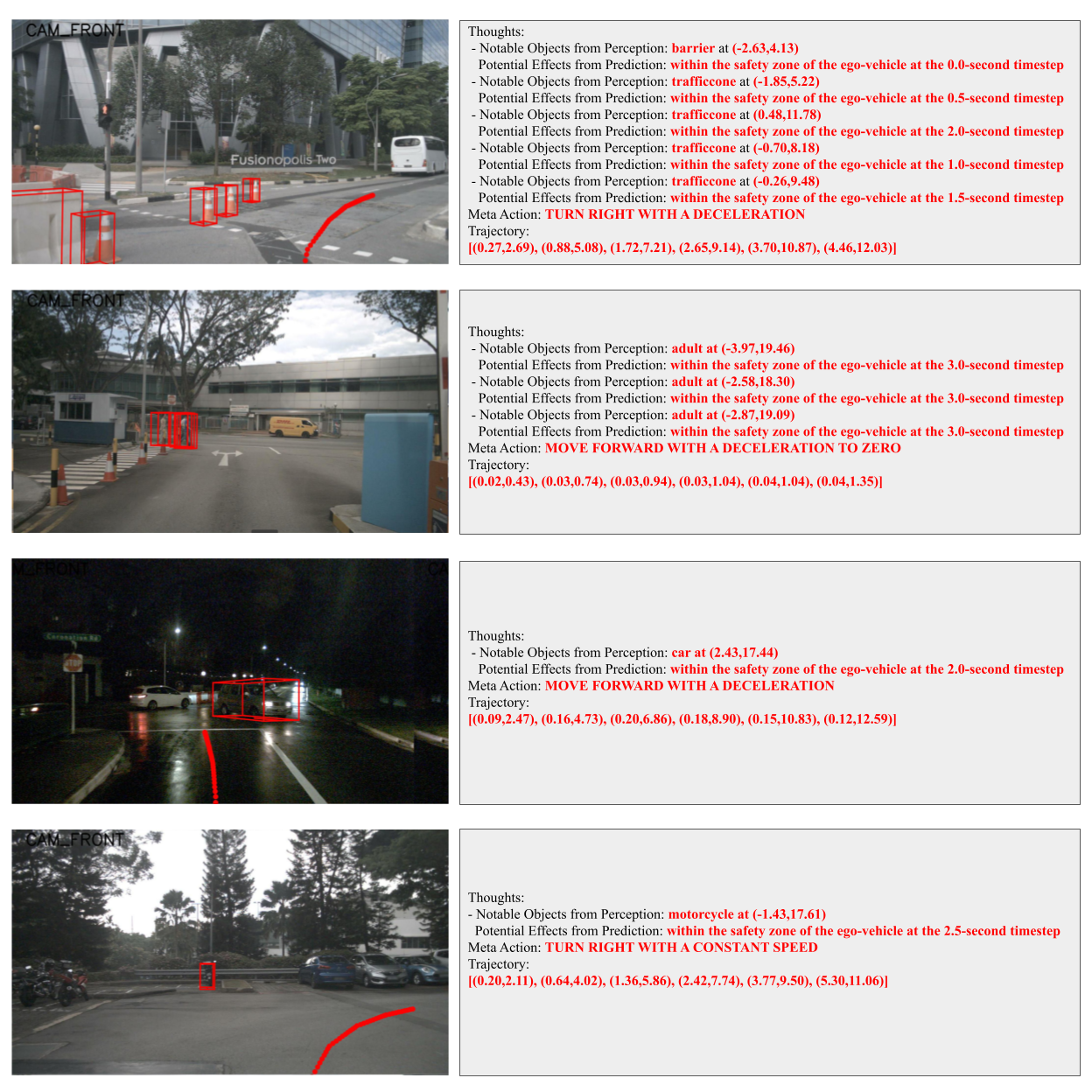
这种方法的优势在于,它能够充分利用GPT模型在处理和理解复杂上下文信息方面的优势。通过将道路情况、车辆状态、交通规则等多维度信息编码为语言描述,GPT-Driver能够更全面地理解驾驶环境,从而做出更智能、更安全的决策。
创新的提示-推理-微调策略
为了进一步提高GPT模型在数值推理方面的能力,研究团队提出了一种名为"提示-推理-微调"的新策略。这种策略不仅能让LLM描述高度精确的轨迹坐标,还能用自然语言解释其内部决策过程。这一特性极大地增强了系统的可解释性,使得工程师和用户能够更好地理解和信任AI做出的决策。
在nuScenes数据集上的卓越表现
GPT-Driver在大规模的nuScenes数据集上进行了广泛的实验评估。实验结果令人鼓舞,充分证明了这种基于GPT的运动规划器在效果、泛化能力和可解释性方面的优势。
研究团队在GitHub仓库中公开了项目代码和详细的使用说明,鼓励更多研究者和开发者参与到这一激动人心的研究中来。
GPT-Driver的工作原理
GPT-Driver的工作流程可以概括为以下几个步骤:
-
数据准备:将自动驾驶场景中的各种信息(如道路状况、其他车辆位置、交通规则等)转换为文本描述。
-
提示工程:设计精心crafted的提示,引导GPT模型理解当前驾驶场景并生成相应的运动规划。
-
轨迹生成:GPT模型基于输入的场景描述,生成一系列坐标点,这些点共同构成了预测的行驶轨迹。
-
后处理:将GPT生成的文本输出转换回具体的数值坐标,形成可执行的运动规划指令。
-
验证与优化:通过与真实驾驶数据对比,不断优化模型性能和生成策略。
项目实施与评估
GPT-Driver项目的实施过程中,研究团队使用了OpenAI的API进行模型微调和评估。他们提供了详细的步骤指南,包括如何准备训练数据、如何提交微调作业,以及如何评估微调后模型的性能。
值得注意的是,研究团队特别强调了数据隐私和API使用的安全性。他们提醒用户保护好自己的API密钥,并注意微调过程中可能产生的费用。
GPT-Driver的潜在应用与影响
GPT-Driver的成功不仅仅局限于学术研究,它为自动驾驶技术的未来发展指明了一个全新的方向。这种基于大型语言模型的方法有潜力解决传统运动规划器面临的诸多挑战:
-
更好的泛化能力:通过利用GPT模型强大的语言理解和生成能力,GPT-Driver有望在各种复杂和新颖的驾驶场景中表现出色。
-
增强的可解释性:系统能够用自然语言解释其决策过程,这对于提高用户信任度和满足监管要求至关重要。
-
灵活的场景适应:基于语言的方法使得系统可以更容易地适应不同的驾驶环境和规则,只需通过调整文本描述即可。
-
多模态融合的潜力:未来可能结合视觉、传感器数据等多种输入,进一步提高系统的感知和决策能力。
未来展望与挑战
尽管GPT-Driver展现了令人振奋的前景,但研究团队也认识到,将这项技术真正应用于现实世界的自动驾驶系统还面临诸多挑战:
-
实时性能:需要进一步优化模型,确保能在毫秒级别内完成复杂的运动规划任务。
-
安全性验证:在将系统部署到实际道路之前,需要进行更加严格和全面的安全性测试。
-
边缘场景处理:如何确保系统能够应对各种极端和罕见的驾驶情况仍是一个重要课题。
-
计算资源优化:考虑到车载系统的限制,需要探索如何在有限的计算资源下实现高效的运行。
-
伦理与责任问题:随着AI在决策过程中扮演越来越重要的角色,如何处理相关的伦理和法律责任问题变得尤为重要。
结语
GPT-Driver项目为自动驾驶技术的发展开辟了一条充满希望的新道路。通过巧妙地将大型语言模型的强大能力应用于运动规划这一关键任务,研究人员不仅展示了AI在复杂决策问题上的潜力,也为解决自动驾驶中的核心挑战提供了创新思路。
随着研究的深入和技术的不断优化,我们有理由相信,像GPT-Driver这样的创新方法将在推动自动驾驶技术走向更安全、更智能、更可靠的未来道路上发挥重要作用。这个项目不仅是自动驾驶领域的一个重要里程碑,也是人工智能跨领域应用的一个精彩范例,展现了科技创新如何持续推动人类社会向前发展。
对于有志于探索自动驾驶前沿技术的研究者和开发者来说,GPT-Driver项目无疑提供了一个绝佳的起点。通过参与这个开源项目,贡献自己的智慧和创意,每个人都有机会为构建更安全、更智能的交通未来贡献一份力量。
让我们期待GPT-Driver及其背后的创新理念能够激发更多突破性的研究,最终为我们带来真正安全、可靠的自动驾驶体验,让智能出行成为每个人的日常现实。
🚗💨 随着GPT-Driver的不断发展,我们离梦想中的智能交通世界又近了一步。让我们共同期待这项技术会如何重塑我们的出行方式,为未来的智慧城市描绘出一幅令人期待的蓝图。









