深入探讨相机-激光雷达标定技术:实现精确的多传感器融合
 Ray
Ray相机-激光雷达标定:实现精确的多传感器融合
在自动驾驶、机器人和计算机视觉等领域,相机和激光雷达是两种最常用的传感器。然而,要充分发挥这两种传感器的优势,实现精确的环境感知和三维重建,关键在于对它们进行精确的标定。本文将深入探讨相机-激光雷达标定的重要性、技术挑战和解决方案,为读者提供全面的标定知识和实践指南。
为什么需要相机-激光雷达标定?
相机和激光雷达各有优势:相机可以提供丰富的色彩和纹理信息,而激光雷达则可以直接获取准确的3D点云数据。然而,这两种传感器工作在不同的坐标系统中,如果不进行精确的标定,就无法将它们的数据进行融合和对齐。
相机-激光雷达标定的目的是求解两个传感器之间的刚体变换关系,包括旋转矩阵R和平移向量t。通过这个变换关系,我们就可以将激光雷达的3D点云数据投影到相机图像平面上,或者将图像中的2D特征点映射到3D空间中。这为以下应用奠定了基础:
- 3D目标检测和跟踪
- 语义分割和场景理解
- 视觉SLAM和3D重建
- 障碍物避障和路径规划
因此,高精度的相机-激光雷达标定对于实现可靠的多传感器融合至关重要。
相机-激光雷达标定的技术挑战
虽然相机-激光雷达标定的重要性不言而喻,但在实际操作中仍面临诸多挑战:
-
数据模态差异: 相机采集的是2D图像,而激光雷达获取的是3D点云,两者的数据形式存在本质差异。
-
时间同步: 相机和激光雷达的采样频率和数据传输延迟可能不同,导致时间不同步。
-
视场重叠: 相机和激光雷达的视场可能不完全重叠,这会影响可用于标定的共同区域。
-
标定物选择: 需要设计既能被相机清晰成像,又能被激光雷达准确扫描的标定物。
-
环境因素: 光照条件、反射和遮挡等因素会影响标定结果的稳定性。
-
标定精度: 毫米级的标定误差可能导致远距离处的投影偏差达到厘米甚至米级。
针对这些挑战,研究人员提出了多种标定方法和优化策略。接下来,我们将详细介绍一种基于棋盘格的标定方法,这也是目前应用最广泛的方法之一。
基于棋盘格的相机-激光雷达标定方法
这种方法的核心思想是使用一个特殊设计的棋盘格标定板,通过同时采集棋盘格的图像和点云数据,建立2D-3D对应关系,从而求解标定参数。具体步骤如下:
1. 准备标定设备
首先需要准备一个合适的棋盘格标定板。根据GitHub上cam_lidar_calibration项目的建议,可以使用以下规格的标定板:
- 尺寸: A1大小(594 x 841mm)
- 方格大小: 95mm
- 内角点数量: 7x5(水平x垂直)
将棋盘格打印出来,并固定在一个刚性的不透明矩形板上。确保棋盘格的中心与背板的中心尽可能对齐,边缘保持平行。
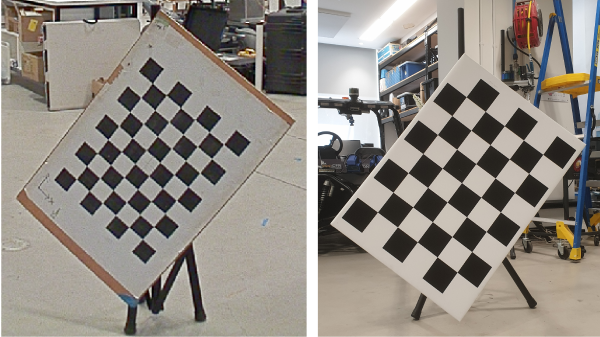
将棋盘格旋转45°,使其呈菱形状,然后安装在一个合适的支架上。这种布置可以帮助激光雷达更好地扫描到棋盘格的边缘。
2. 配置参数
在开始标定之前,需要在配置文件中设置以下参数:
- 相机和激光雷达的话题名称
- 点云滤波的默认边界(可选)
- 棋盘格的详细信息:内角点数量、方格大小、背板尺寸等
3. 采集数据
启动标定程序后,将棋盘格放置在不同的位置和姿态,同��时采集图像和点云数据。为了获得良好的标定结果,需要注意以下几点:
- 采集至少10-20组不同的姿态
- 覆盖1-2米的距离范围(从激光雷达中心算起)
- 确保棋盘格在图像视场内均匀分布
- 改变棋盘格的偏航角和俯仰角,增加姿态多样性
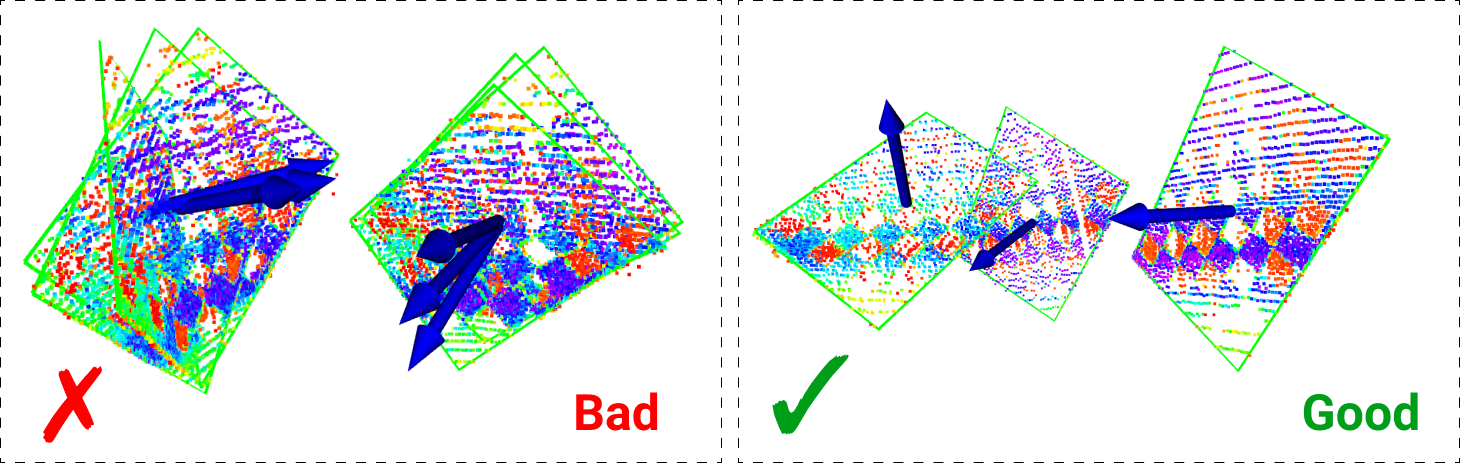
在采集每组数据时,程序会自动提取棋盘格的特征点和边缘,并计算棋盘格的尺寸误差。建议保留棋盘格尺寸误差在30mm以内的样本。
4. 优化标定参数
完成数据采集后,程序会自动运行优化算法,寻找最佳的标定参数集。优化过程主要包括以下步骤:
- 使用PnP(Perspective-n-Point)算法进行初始估计
- 应用Levenberg-Marquardt(LM)算法进行非线性优化
- 计算标定质量指标(如条件数、重投影误差等)
- 选择最佳的参数集
5. 评估标定结果
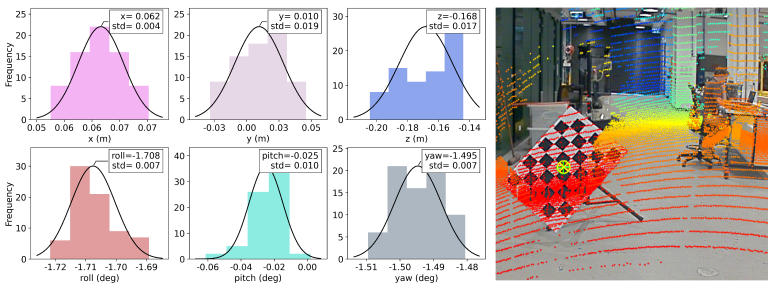
优化完成后,程序会生成一个包含最佳标定参数集的CSV文件。使用这个文件,我们可以进行以下评估:
- 绘制参数分布的直方图,观察其高斯拟合情况
- 计算所有样本的重投影误差
- 可视化标定结果,检查点云和图像的对齐情况
标定结果的应用与验证
获得标定参数后,我们可以将其应用到实际的多传感器融合任务中。以下是几种常见的验证方法:
-
点云着色: 将激光雷达点云投影到图像上,用对应像素的颜色对点云进行着色。这可以直观地展示标定的准确性。
-
3D目标检测: 在图像中检测目标,然后将其边界框投影到3D空间。检查3D边界框是否�准确包围了点云中的目标。
-
语义分割: 对图像进行语义分割,然后将标签信息传递给对应的点云。观察点云的语义标签是否准确。
-
动态场景测试: 在包含移动物体的场景中进行测试,检查图像和点云中的运动目标是否对齐。
-
长距离投影: 特别关注远距离物体的投影效果,因为小的角度误差在远处会造成较大的偏差。
进阶技巧与注意事项
-
多传感器标定: 如果系统包含多个相机或激光雷达,考虑使用联合标定方法,以确保整个系统的一致性。
-
在线标定: 对于长期运行的系统,考虑实现在线标定功能,以适应传感器安装位置的微小变化。
-
温度补偿: 温度变化可能影响标定参数,特别是在室外环境中。考虑建立温度与标定参数的对应关系。
-
标定板优化: 除了传统的棋盘格,还可以尝试使用AprilTag或ArUco码等现代标记,它们可能提供更好的鲁棒性。
-
深度学习辅助: 考虑使用深度学习方法来辅助特征提取和匹配,提高标定的准确性和鲁棒性。
-
不确定性估计: 除了得到点估计的标定参数,还应该估计参数的不确定性,这对于后续的传感器融合非常重要。
结语
相机-激光雷达标定是实现高精度多传感器融合的关键步骤。通过本文的详细介绍,读者应该对标定的原理、流程和注意事项有了全面的了解。然而,标定技术仍在不断发展,未来可能会出现更加智能和自动化的方法。研究人员和工程师们应该持续关注这一领域的最新进展,并根据具体应用场景选择最合适的标定策略。
最后,建议读者亲自�尝试文中介绍的标定方法,只有通过实践,才能真正掌握这项重要技术。同时,也欢迎读者探索其他开源的标定工具和框架,如ACFR的cam_lidar_calibration、heethesh的lidar_camera_calibration等,这些项目都提供了宝贵的代码实现和数据集,可以帮助读者更深入地学习和研究相机-激光雷达标定技术。
编辑推荐精选


讯飞智文
一键生成PPT和Word,让学习生活更轻松
讯飞智文是一个利用 AI 技术的项目,能够帮助用户生成 PPT 以及各类文档。无论是商业领域的市场分析报告、年度目标制定,还是学生群体的职业生涯规划、实习避坑指南,亦或是活动策划、旅游攻略等内容,它都能提供支持,帮助用户精准表达,轻松呈现各种信息。


讯飞星火
深度推理能力全新升级,全面对标OpenAI o1
科大讯飞的星火大模型,支持语言理解、知识问答和文本创作等多功能,适用于多种文件和业务场景,提升办公和日常生活的效率。讯飞星火是一个提供丰富智能服务的平台,涵盖科技资讯、图像创作、写作辅助、编程解答、科研文献解读等功能,能为不同需求的用户提供便捷高效的帮助,助力用户轻松获取信息、解决问题,满足多样化使用场景。


Spark-TTS
一种基于大语言模型的高效单流解耦语音令牌文本到语音合成模型
Spark-TTS 是一个基于 PyTorch 的开源文本到语音合成项目,由多个知名机构联合参与。该项目提供了高效的 LLM(大语言模型)驱动的语音合成方案,支持语音克隆和语音创建功能,可通过命令行界面(CLI)和 Web UI 两种方式使用。用户可以根据需求调整语音的性别、音高、速度等参数,生成高质量的语音。该项目适用于多种场景,如有声读物制作、智能语音助手开发等。


Trae
字节跳动发布的AI编程神器IDE
Trae是一种自适应的集成开发环境(IDE),通过自动化和多元协作改变开发流程。利用Trae,团队能够更快速、精确地编写和部署代码,从而提高编程效率和项目交付速度。Trae具备上下文感知和代码自动完成功能,是提升开发效率的理想工具。


咔片PPT
AI助力,做PPT更简单!
咔片是一款轻量化在线演示设计工具,借助 AI 技术,实现从内容生成到智能设计的一站式 PPT 制作服务。支持多种文档格式导入生成 PPT,提供海量模板、智能美化、素材替换等功能,适用于销售、教师、学生等各类人群,能高效制作出高品质 PPT,满足不同场景演示需求。


讯飞绘文
选题、配图、成文,一站式创作,让内容运营更高效
讯飞绘文,一个AI集成平台,支持写作、选题、配图、排版和发布。高效生成适用于各类媒体的定制内容,加速品牌传播,提升内容营销效果。


材料星
专业的AI公文写作平台,公文写作神器
AI 材料星,专业的 AI 公文写作辅助平台,为体制内工作人员提供高效的公文写作解决方案。拥有海量公文文库、9 大核心 AI 功能,支持 30 + 文稿类型生成,助力快速完成领导讲话、工作总结、述职报告等材料,提升办公效率,是体制打工人的得力写作神器。


openai-agents-python
OpenAI Agents SDK,助力开发者便捷使用 OpenAI 相关功能。
openai-agents-python 是 OpenAI 推出的一款强大 Python SDK,它为开发者提供了与 OpenAI 模型交互的高效工具,支持工具调用、结果处理、追踪等功能,涵盖多种应用场景,如研究助手、财务研究等,能显著提升开发效率,让开发者更轻松地利用 OpenAI 的技术优势。


Hunyuan3D-2
高分辨率纹理 3D 资产生成
Hunyuan3D-2 是腾讯开发的用于 3D 资产生成的强大工具,支持从文本描述、单张图片或多视角图片生成 3D 模型,具备快速形状生成能力,可生成带纹理的高质量 3D 模型,适用于多个领域,为 3D 创作提供了高效解决方案。


3FS
一个具备存储、管理和客户端操作等多种功能的分布式文件系统相关项目。
3FS 是一个功能强大的分布式文件系统项目,涵盖了存储引擎、元数据管理、客户端工具等多个模块。它支持多种文件操作,如创建文件和目录、设置布局等,同时具备高效的事件循环、节点选择和协程池管理等特性。适用于需要大规模数据存储和管理的场景,能够提高系统的性能和可靠性,是分布式存储领域的优质解决方案。
推荐工具精选




AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号