
Instruct2Act入门学习资料 - 多模态指令到机器人动作的映射框架
Instruct2Act是一个创新的框架,它利用大型语言模型(LLM)将多模态指令转换为机器人的顺序动作。本文将为您介绍Instruct2Act项目的核心内容和相关学习资源,帮助您快速了解和上手这个有趣的项目。
项目概述
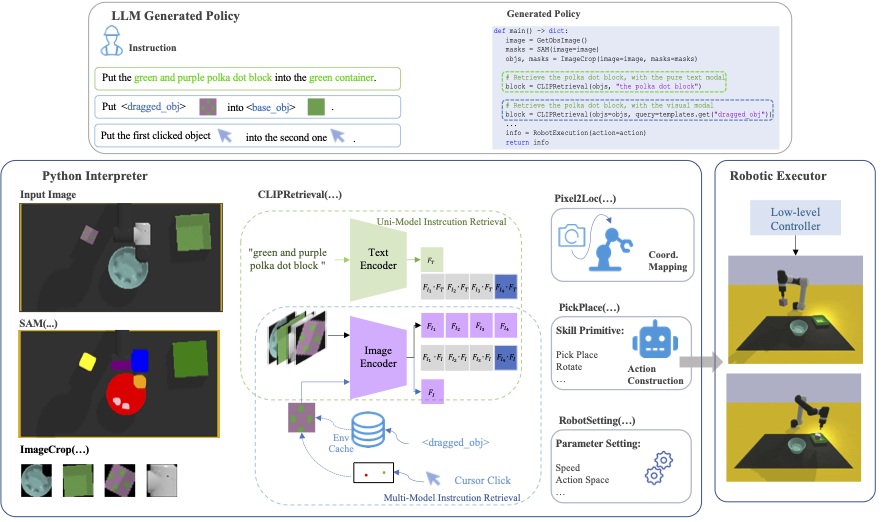
Instruct2Act主要解决的问题是如何将复杂的高级指令转换为精确的机器人动作代码。它采用了以下关键技术:
- 使用LLM生成Python程序,构成完整的感知、规划和动作循环
- 利用预定义API访问多个基础模型,如SAM(Segment Anything Model)和CLIP
- 结合基础模型的专业知识和机器人能力,实现复杂指令到精确策略代码的转换
该框架在多个机器人操作任务中展现出了优秀的性能,尤其是在零样本学习方面表现突出。
核心资源
-
GitHub仓库: OpenGVLab/Instruct2Act 这里包含了项目的完整代码、安装说明和使用教程。
-
论文: Instruct2Act: Mapping Multi-modality Instructions to Robotic Actions with Large Language Model 详细介绍了项目的理论基础和技术细节。
-
演示视频:
安装与运行
要运行Instruct2Act,请按以下步骤操作:
- 使用提供的
environment.yaml安装所需的包 - 安装VIMABench
- 在
visual_programming_prompt/robotic_exec_generation.py中设置OpenAI API密钥 - 运行
robotic_anything_gpt_online.py
如遇安装问题,可参考Issue #6。
支持的模块
Instruct2Act当前支持多个模块,包括SAM和CLIP等基础视觉模型。您需要提前准备这些模型的检查点,可以从以下链接下载:
评估任务
项目提供了6个代表性的元任务用于评估,涵盖了视觉操作、场景理解、旋转、重排等多个方面。您可以通过VIMABench运行这些评估任务。

进一步学习
如果您对Instruct2Act感兴趣并想深入了解,可以关注以下相关项目:
结语
Instruct2Act为机器人操作任务提供了一个强大而灵活的框架。通过学习和使用这个项目,您可以深入了解如何结合大型语言模型和机器人技术,实现更智能、更精确的机器人控制。无论您是机器人研究者还是AI爱好者,Instruct2Act都值得您花时间去探索和实践。










