MVDet: 多视角行人检测的新突破
 Ray
RayMVDet简介
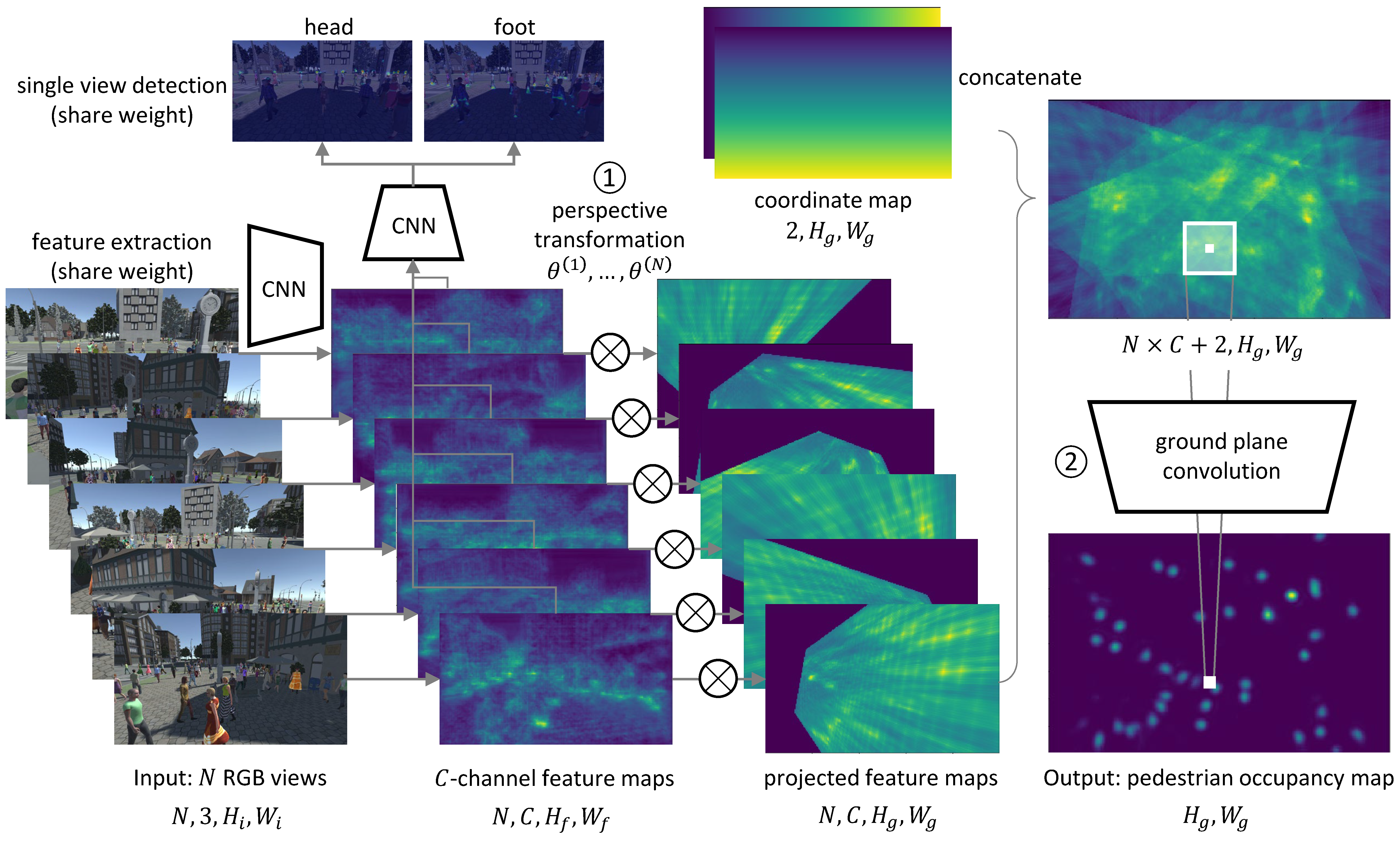
MVDet是一种创新的多视角行人检测系统,由来自澳大利亚国立大学的研究人员Yunzhong Hou、Liang Zheng和Stephen Gould在ECCV 2020上提出。该系统旨在解决多视角场景中由遮挡导致的检测歧义问题,通过巧妙的特征透视变换和多视角信息融合,实现了优异的检测性能。
核心创新
MVDet的核心创新主要体现在以下两个方面:
-
特征级别的多视角信息融合 与现有方法在图像平面上组合锚框特征不同,MVDet采用无锚框的方法,将特征图直接投影到地平面(鸟瞰图)上进行多视角信息的融合。这种方法避免了不准确的锚框形状和大小对性能的限制。
-
大卷积核解决空间歧义 为了进一步解决剩余的空间歧义,MVDet在地平面特征图上应用大卷积核,并从检测峰值推断位置。这种方法能有效处理复杂场景中的遮挡问题。
实验结果
MVDet在标准的Wildtrack数据集上取得了88.2%的MODA(多目标检测准确率),相比现有最佳方法提升了14.1%。这一突破性的结果充分证明了MVDet在多视角行人检测任务上的卓越性能。
除了Wildtrack数据集,研究人员还在新引入的合成数据集MultiviewX上对MVDet进行了详细分析。MultiviewX数据集允许研究者控制遮挡程度,为深入研究多视角检测算法提供了理想的平台。
MultiviewX数据集
MultiviewX是一个新颖的合成多视角行人检测数据集,具有以下特点:
- 覆盖16米 x 25米的区域,地平面量化为640x1000的网格
- 6个具有重叠视野的摄像头,每个输出1080x1920分辨率的图像
- 400帧的标注,2fps(与Wildtrack相同)
- 平均每个位置被4.41个摄像头覆盖

MultiviewX数据集的创建使用了来自PersonX的行人模型,在Unity引擎中构建。这个数据集为研究者提供了一个可控的环境,用于深入分析多视角检测算法在不同遮挡情况下的表现。
MVDet代码实现
MVDet的完整PyTorch实现已在GitHub上开源。主要依赖包括:
- Python 3.7+
- PyTorch 1.4+ & torchvision
- NumPy
- Matplotlib
- Pillow
- OpenCV-Python
- Kornia
- MATLAB & MATLAB Engine (用于评估)
训练MVDet
要训练MVDet,只需运行以下命令:
CUDA_VISIBLE_DEVICES=0,1 python main.py -d wildtrack
这应该能自动返回接近论文报告的88.2% MODA的评估结果。
应用展示
MVDet在Wildtrack和MultiviewX数据集上的检测效果如下:
| Wildtrack | MultiviewX |
|---|---|
 |  |
从演示中可以看出,MVDet能够有效地处理复杂场景中的多人检测任务,即使在存在严重遮挡的情况下也能保持高准确率。
结论与未来展望
MVDet通过创新的特征透视变换和多视角信息融合方法,在多视角行人检测任务上取得了显著进展。它不仅在标准数据集上实现了最先进的性能,还为未来的研究提供了新的思路。
随着MultiviewX等新数据集的引入,我们期待看到更多针对多视角检测算法的深入研究和改进。未来的工作可能会集中在进一步提高检测精度、降低计算复杂度,以及将MVDet的思想扩展到其他计算机视觉任务中。
MVDet的��成功为多视角计算机视觉领域开辟了新的可能性,相信它将激发更多创新性的研究,推动该领域的快速发展。
参考链接
编辑推荐精选


openai-agents-python
OpenAI Agents SDK,助力开发者便捷使用 OpenAI 相关功能。
openai-agents-python 是 OpenAI 推出的一款强大 Python SDK,它为开发者提供了与 OpenAI 模型交互的高效工具,支持工具调用、结果处理、追踪等功能,涵盖多种应用场景,如研究助手、财务研究等,能显著提升开发效率,让开发者更轻松地利用 OpenAI 的技术优势。


Hunyuan3D-2
高分辨率纹理 3D 资产生成
Hunyuan3D-2 是腾讯开发的用于 3D 资产生成的强大工具,支持从文本描述、单张图片或多视角图片生成 3D 模型,具备快速形状生成能力,可生成带纹理的高质量 3D 模型,适用于多个领域,为 3D 创作提供了高效解决方案。


3FS
一个具备存储、管理和客户端操作等多种功能的分布式文件系统相关项目。
3FS 是一个功能强大的分布式文件系统项目,涵盖了存储引擎、元数据管理、客户端工具等多个模块。它支持多种文件操作,如创建文件和目录、设置布局等,同时具备高效的事件循环、节点选择和协程池管理等特性。适用于需要大规模数据存储和管理的场景,能够提高系统的性能和可靠性,是分布式存储领域的优质解决方案。


TRELLIS
用于可扩展和多功能 3D 生成的结构化 3D 潜在表示
TRELLIS 是一个专注于 3D 生成的项目,它利用结构化 3D 潜在表示技术,实现了可扩展且多功能的 3D 生成。项目提供了多种 3D 生成的方法和工具,包括文本到 3D、图像到 3D 等,并且支持多种输出格式,如 3D 高斯、辐射场和网格等。通过 TRELLIS,用户可以根据文本描述或图像输入快速生成高质量的 3D 资产,适用于游戏开发、动画制作、虚拟现实等多个领域。


ai-agents-for-beginners
10 节课教你开启构建 AI 代理所需的一切知识
AI Agents for Beginners 是一个专为初学者打造的课程项目,提供 10 节课程,涵盖构建 AI 代理的必备知识,支持多种语言,包含规划设计、工具使用、多代理等丰富内容,助您快速入门 AI 代理领域。

AEE
AI Excel全自动制表工具
AEE 在线 AI 全自动 Excel 编辑器,提供智能录入、自动公式、数据整理、图表生成等功能,高效处理 Excel 任务,提升办公效率。支持自动高亮数据、批量计算、不规则数据录入,适用于企业、教育、金融等多场景。


UI-TARS-desktop
基于 UI-TARS 视觉语言模型的桌面应用,可通过自然语言控制计算机进行多模态操作。
UI-TARS-desktop 是一款功能强大的桌面应用,基于 UI-TARS(视觉语言模型)构建。它具备自然语言控制、截图与视觉识别、精确的鼠标键盘控制等功能,支持跨平台使用(Windows/MacOS),能提供实时反馈和状态显示,且数据完全本地处理,保障隐私安全。该应用集成了多种大语言模型和搜索方式,还可进行文件系统操作。适用于需要智能交互和自动化任务的场景,如信息检索、文件管理等。其提供了详细的文档,包括快速启动、部署、贡献指南和 SDK 使用说明等,方便开发者使用和扩展。


Wan2.1
开源且先进的大规模视频生成模型项目
Wan2.1 是一个开源且先进的大规模视频生成模型项目,支持文本到图像、文本到视频、图像到视频等多种生成任务。它具备丰富的配置选项,可调整分辨率、扩散步数等参数,还能对提示词进行增强。使用了多种先进技术和工具,在视频和图像生成领域具有广泛应用前景,适合研究人员和开发者使用。


爱图表
全流程 AI 驱动的数据可视化工具,助力用户轻松创作高颜值图表
爱图表(aitubiao.com)就是AI图表,是由镝数科技推出的一款创新型智能数据可视化平台,专注于为用户提供便捷的图表生成、数据分析和报告撰写服务。爱图表是中国首个在图表场景接入DeepSeek的产品。通过接入前沿的DeepSeek系列AI模型,爱图表结合强大的数据处理能力与智能化功能,致力于帮助职场人士高效处理和表达数据,提升工作效率和报告质量。


Qwen2.5-VL
一款强大的视觉语言模型,支持图像和视频输入
Qwen2.5-VL 是一��款强大的视觉语言模型,支持图像和视频输入,可用于多种场景,如商品特点总结、图像文字识别等。项目提供了 OpenAI API 服务、Web UI 示例等部署方式,还包含了视觉处理工具,有助于开发者快速集成和使用,提升工作效率。
推荐工具精选







AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号