
神经网络赛车:AI驾驶技能的突破性进展
在人工智能和机器学习领域,一个引人注目的项目正在展示AI在复杂任务中的惊人能力 - 神经网络赛车(Neural Network Racing)。这个项目不仅仅是一个有趣的技术演示,更为自动驾驶技术的发展提供了新的思路和灵感。
项目概述
神经网络赛车是一个使用深度学习技术来训练AI驾驶虚拟赛车的项目。该项目由开发者Tomas Brezina在GitHub上开源,使用Python编程语言实现,主要依赖pyglet和numpy库。
项目的核心目标是让神经网络学习如何在一个2D赛道上驾驶赛车。通过不断的训练和进化,AI驾驶员逐渐掌握了在复杂赛道上高速驾驶的技巧,甚至能够超越人类玩家的水平。
技术实现
神经网络架构
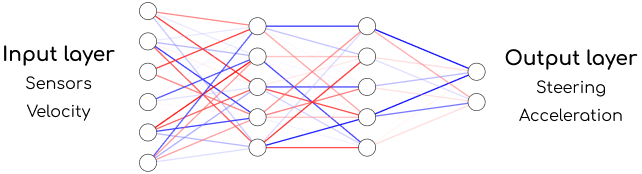
该项目使用了一个多层前馈神经网络来控制赛车。网络的输入层包含6个神经元,对应赛车的6个传感器数据。输出层包含2个神经元,分别控制赛车的加速和转向。中间还有两个隐藏层,使网络具有足够的复杂度来学习驾驶策略。
具体的网络结构如下:
[6, 4, 3, 2]
这种结构允许神经网络从原始的传感器数据中提取出高级特征,并做出复杂的决策。
进化算法
为了训练神经网络,项目采用了进化算法。每一代中表现最好的赛车会被选择作为下一代的父本,通过突变产生新一代的赛车。这种方法模拟了自然选择的过程,使得神经网络能够逐步优化其驾驶策略。
进化过程的关键参数包括:
- 种群大小:40辆赛车
- 突变率:0.6
- 每代最长运行时间:30秒
这些参数可以在配置文件中调整,以适应不同的训练需求。
环境模拟
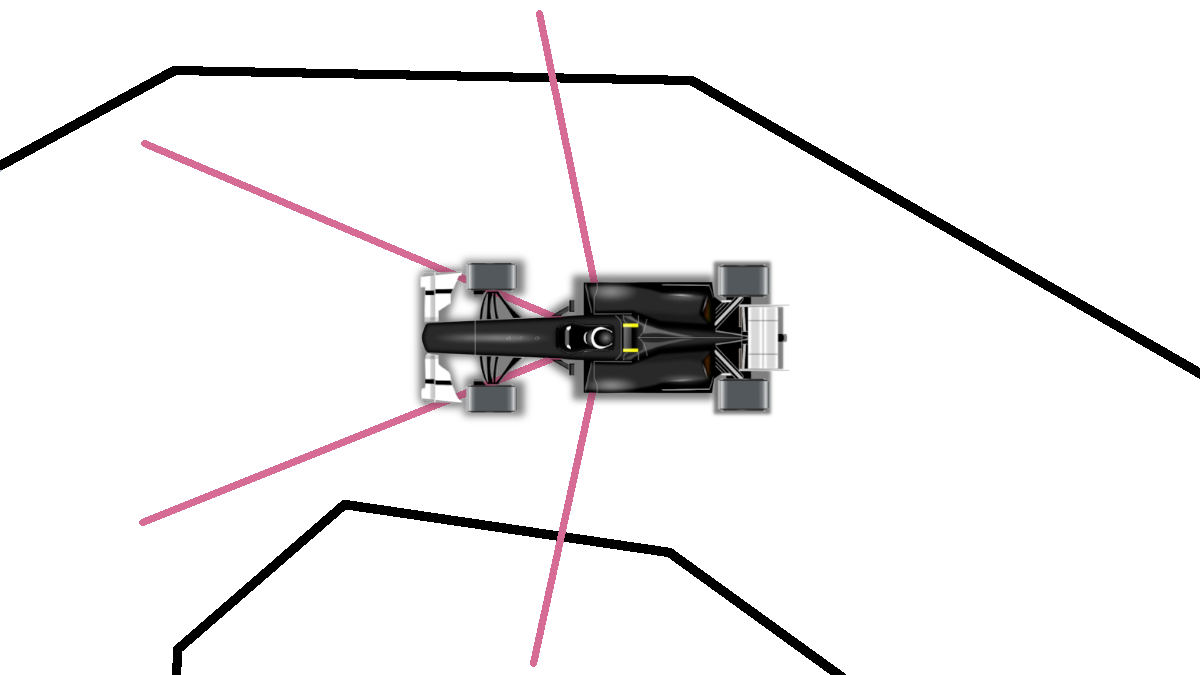
项目使用Pyglet库创建了一个2D赛车环境。赛道由不同的地形块组成,包括直道、弯道和障碍物。赛车需要学会在这些复杂的地形中导航,同时保持高速和稳定性。
环境模拟还包括了物理引擎,模拟了赛车的加速、减速、转向和摩擦等特性。这使得AI必须学习真实的驾驶技巧,而不是简单的路径规划。
赛道生成
为了增加训练的多样性和挑战性,项目实现了procedural generation(程序化生成)的赛道系统。每次训练可以生成不同的赛道布局,迫使AI学习适应各种驾驶情况,而不是仅仅记忆固定的路线。
项目成果
经过多代进化训练,神经网络驾驶员展现出了令人印象深刻的驾驶技能:
-
高速驾驶:AI能够在直道上保持最高速度,充分利用赛车的性能。
-
精准过弯:在接近弯道时,AI学会了适时减速和转向,保持赛车的稳定性。
-
避障能力:面对赛道上的障碍物,AI能够迅速做出反应,避免碰撞。
-
路线优化:AI逐渐学会了选择最优的行驶路线,减少不必要的转向和减速。
-
适应性:在不同的赛道布局中,AI都能快速适应并找到有效的驾驶策略。
这些成果展示了神经网络在复杂决策任务中的强大潜力,也为自动驾驶技术的发展提供了宝贵的启示。
项目意义
神经网络赛车项目虽然是在虚拟环境中进行的,但其意义远不止于此。它在多个方面为自动驾驶技术和AI研究提供了重要的启示:
-
端到端学习:项目展示了从原始传感器数据直接学习控制决策的可能性,这种方法可能比传统的模块化自动驾驶系统更加灵活和高效。
-
泛化能力:通过在不同赛道上训练,AI展示了强大的泛化能力,这对于实际道路环境中的自动驾驶至关重要。
-
极限操控:AI能够在高速和复杂环境下保持车辆控制,这种能力对于提高自动驾驶的安全性和性能有重要意义。
-
仿真训练:项目证明了使用仿真环境进行AI训练的有效性,这可以大大降低实际道路测试的成本和风险。
-
进化算法:项目成功应用进化算法来优化神经网络,为解决复杂的控制问题提供了新的思路。
未来展望
神经网络赛车项目虽然已经取得了显著的成果,但仍有很大的发展空间:
-
3D环境:将项目扩展到3D环境中,更好地模拟真实世界的驾驶条件。
-
多智能体:引入多辆AI控制的赛车,研究它们之间的互动和竞争策略。
-
迁移学习:探索将虚拟环境中学到的驾驶技能迁移到实际车辆上的可能性。
-
混合学习:结合监督学习、强化学习等其他机器学习方法,进一步提高AI的性能。
-
人机协作:研究AI驾驶员如何与人类驾驶员配合,为未来的半自动驾驶系统提供借鉴。
结语
神经网络赛车项目展示了AI在复杂控制任务中的巨大潜力。它不仅是一个有趣的技术演示,更为自动驾驶技术的发展提供了新的思路和灵感。随着项目的不断发展和完善,我们有理由期待AI驾驶技能会达到更高的水平,为未来的智能交通系统奠定基础。
这个开源项目也为AI爱好者和研究人员提供了一个绝佳的学习和实验平台。通过参与和贡献,我们可以共同推动这一激动人心的技术向前发展,探索AI在更多领域中的应用潜力。



















