PedSurvey:从手工特征到深度特征的行人检测综述
 Ray
RayPedSurvey:从手工特征到深度特征的行人检测综述
行人检测是计算机视觉领域的一个重要研究方向,在智能驾驶、视频监控等众多应用场景中发挥着关键作用。近年来,随着深度学习技术的发展,行人检测算法取得了长足进步。PedSurvey项目对行人检测领域的发展历程和最新进展进行了全面系统的梳理和总结,为研究人员提供了宝贵的参考资源。
项目概述
PedSurvey项目由来自天津大学的研究团队发起,旨在对行人检测领域从手工特征到深度特征的发展历程进行全面综述。项目在GitHub上开源,提供了丰富的论文列表,涵盖了单光谱和多光谱行人检测的各个方面。同时,项目还提供了主流数据集上不同方法的性能对比。
项目的主要内容包括:
- 检测流程的四个主要步骤:候选框生成、特征提取、候选框分类/回归、后处理
- 单光谱行人检测方法,包括基于手工特征和深度特征的方法
- 多光谱行人检测方法
- 行人检测数据集
- 行人检测面临的主要挑战
- 相关综述论文
- 多视角行人检测
- 不同方法在主流数据集上的性能对比
项目还发布了一个新的大规模行人检测数据集TJU-DHD-Pedestrian,为算法评测提供了新的基准。
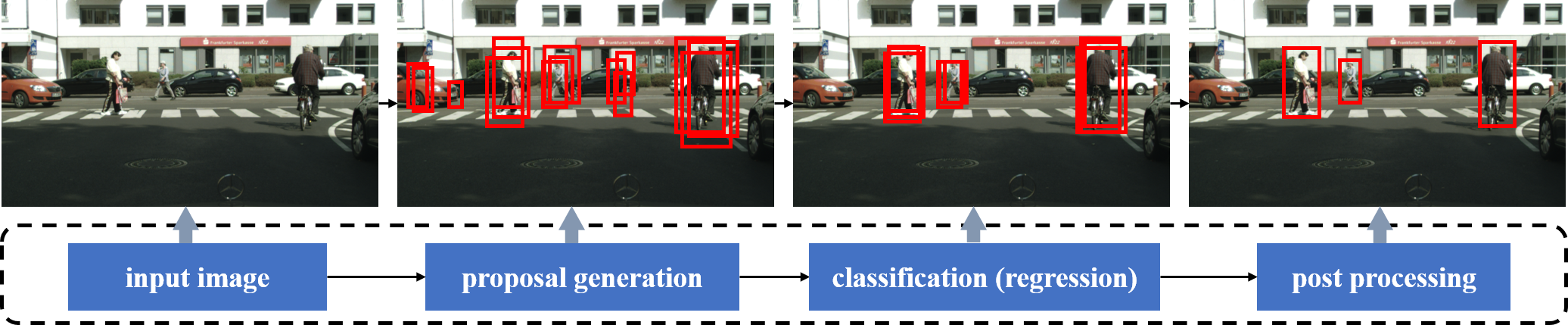
检测流程
PedSurvey将行人检测的一般流程归纳为四个主要步骤:
候选框生成
生成可能包含行人的候选区域,主要方法包括:
- 滑动窗口:以不同尺度和比例在图像上滑动固定大小的窗口
- 粒子窗口:通过粒子滤波等方法生成稀疏的候选窗口
- 显著性检测:利用图像的显著性特征生成候选区域
- 区域建议网络(RPN):利用深度网络直接生成候选区域
其中,RPN是目前主流目标检测框架中普遍采用的方法。
特征提取
从候选区域中提取有区分性的特征,主要包括:
- 手工设计特征:如Haar特征、HOG特征、ICF特征等
- 深度学习特征:利用CNN等深度网络自动学习特征
深度特征具有更强的表达能力,是目前主流方法采用的特征。
候选框分类/回归
利用提取的特征对候选框进行分类(是否包含行人)和位置微调。常用的分类器包括SVM、AdaBoost等,深度学习方法则直接用网络输出分类概率和边界框回归。
后处理
对检测结果进行冗余抑制和优化,常用的方法有非极大值抑制(NMS)等。近年来也出现了一些改进的后处理方法,如Soft-NMS、Relation Network等。
单光谱行人检测
PedSurvey将单光谱行人检测方法分为两大类:基于手工特征的方法和基于深度特征的方法。
基于手工特征的方法
主要包括基于通道特征的方法和基于可变形部件模型的方法。
基于通道特征的方法
通道特征是一种简单高效的特征表示方法,主要代表工作包括:
- Integral Channel Features (ICF)
- Aggregated Channel Features (ACF)
- Locally Decorrelated Channel Features (LDCF)
- Filtered Channel Features (FCF)
这些方法通过设计不同的特征通道和分类器,不断提升检测性能。
基于可变形部件模型的方法
可变形部件模型(DPM)将行人建模为一系列可变形部件的组合,主要代表工作包括:
- Deformable Part Models (DPM)
- Regionlets
- Mixture of Deformable Part Models
DPM系列方法在处理部分遮挡和姿态变化方面表现出色。
基于深度特征的方法
基于深度特征的方法可以进一步分为混合方法和纯CNN方法。
混合�方法
混合方法结合了传统方法和深度学习的优点,主要包括两类:
- CNN作为特征提取器:如Convolutional Channel Features (CCF)等
- CNN作为分类器:如Joint Deep Learning等
这些方法在保持传统方法高效性的同时,利用CNN提升了特征表达能力。
纯CNN方法
纯CNN方法完全基于深度学习框架,主要包括以下几类:
- 尺度感知方法:如MS-CNN、SA-FastRCNN等
- 基于部件的方法:如JointPD、OR-CNN等
- 基于注意力的方法:如CSP、MGAN等
- 基于锚框的方法:如ALFNet、FCOS等
- 基于关键点的方法:如CSP、DEKR等
这些方法从不同角度改进了CNN的检测性能,是目前行人检测的主流方向。
多光谱行人检测
多光谱行人检测利用可见光和热红外等多种光谱信息,主要研究方向包括:
- 深度特征融合:如MSDS-RCNN、CIAN等
- 数据处理:如CMA、CMFL等
- 域适应:如XDFL、MLPD等
多光谱方法在低光照等复杂场景下具有明显优势。
行人检测数据集
PedSurvey对行人检测数据集进行了全面总结,主要包括:
- 早期数据集:如MIT、INRIA等
- 现代数据集:如Caltech、KITTI、CityPersons等
- 多光谱数据集:如KAIST、CVC-14等
其中,CityPersons、Caltech和KITTI是目前使用最广泛的基准数据集。
此外,项目还发布了一个新的大规模数据集TJU-DHD-Pedestrian,包含超过70万个标注框,为算法评测提供了新的基准。
主要挑战
PedSurvey总结了行人检测面临的三大主要挑战:
- 尺度变化:行人在图像中的尺寸变化很大
- 遮挡:行人经常被其他物体部分遮挡
- 域适应:模型在新场景中的泛化能力不足
针对这些挑战,研究人员提出了许多改进方法,如多尺度特征融合、注意力机制、对抗训练等。
未来展望
PedSurvey项目为行人检测领域的发展提供了全面的视角。未来,该领域可能的研究方向包括:
- 更高效的网络结构设计
- 更有效的特征表示学习
- 针对小目标、密集场景的检测优化
- 多任务学习的深入探索
- 自监督、弱监督等新型学习范式的应用
- 与跟踪、重识别等任务的深度融合
此外,如何将行人检测技术更好地应用到实际场景中,也是一个值得关注的方向。
结语
PedSurvey项目为行人检测领域的研究人员提供了一个全面系统的参考资源。通过梳理从手工特征到深度特征的发展历程,总结最新的研究进展,该项目不仅有助于研究人员快速了解该领域的现状,也为未来的研究指明了方向。随着深度学习技术的不断发展,相信行人检测技术将会取得更大的突破,为智能驾驶、视频监控等应用领域带来更多创新。
GitHub项目地址: PedSurvey
参考文献:
- Cao J, Pang Y, Li X. From handcrafted to deep features for pedestrian detection: A survey[J]. IEEE transactions on pattern analysis and machine intelligence, 2022, 44(9): 5428-5449.
- Zhang S, Benenson R, Schiele B. Citypersons: A diverse dataset for pedestrian detection[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2017: 3213-3221.
- Lin T Y, Dollár P, Girshick R, et al. Feature pyramid networks for object detection[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2017: 2117-2125.
编辑推荐精选

AEE
AI Excel全自动制表工具
AEE 在线 AI 全自动 Excel 编辑器,提供智能录入、自动公式、数据整理、图表生成等功能,高效处理 Excel 任务,提升办公效率。支持自动高亮数据、批量计算、不规则数据录入,适用于企业、教育、金融等多场景。


UI-TARS-desktop
基于 UI-TARS 视觉语言模型的桌面应用,可通过自然语言控制计算机进行多模态操作。
UI-TARS-desktop 是一款功能强大的桌面应用,基于 UI-TARS(视觉语言模型)构建。它具备自然语言控制、截图与视觉识别、精确的鼠标键盘控制等功能,支持跨平台使用(Windows/MacOS),能提供实时反馈和状态显示,且数据完全本地处理,保障隐私安全。该应用集成了多种大语言模型和搜索方式,还可进行文件系统操作。适用于需要智能交互和自动化任务的场景,如信息检索、文件管理等。其提供了详细的文档,包括快速启动、部署、贡献指南和 SDK 使用说明等,方便开发者使用和扩展。


Wan2.1
开源且先进的大规模视频生成模型项目
Wan2.1 是一个开源且先进的大规模视频生成模型项目,支持文本到图像、文本到视频、图像到视频等多种生成任务。它具备丰富的配置选项,可调整分辨率、扩散步数等参数,还能对提示词进行增强。使用了多种先进技术和工具,在视频和图像生成领域具有广泛应用前景,适合研究人员和开发者使用。


爱图表
全流程 AI 驱动的数据可视化工具,助力用户轻松创作高颜值图表
爱图表(aitubiao.com)就是AI图表,是由镝数科技推出的一款创新型智能数据可视化平台,专注于为用户提供便捷的图表生成、数据分析和报告撰写服务。爱图表是中国首个在图表场景接入DeepSeek的产品。通过接入前沿的DeepSeek系列AI模型,爱图表结合强大的数据处理能力与智能化功能,致力于帮助职场人士高效处理和表达数据,提升工作效率和报告质量。


Qwen2.5-VL
一款强大的视觉语言模型,支持图像和视频输入
Qwen2.5-VL 是一款强大的视觉语言模型,支持图像和视频输入,可用于多种场景,如商品特点总结、图像文字识别等。项目提供了 OpenAI API 服务、Web UI 示例等部署方式,还包含了视觉处理工具,有助于开发者快速集成和使用,提升工作效率。


HunyuanVideo
HunyuanVideo 是一个可基于文本生成高质量图像和视频的项目。
HunyuanVideo 是一个专注于文本到图像及视频生成的项目。它具备强大的视频生成能力,支持多种分辨率和视频长度选择,能根据用户输入的文本生成逼真的图像和视频。使用先进的技术架构和算法,可灵活调整生成参数,满足不同场景的需求,是文本生成图像视频领域的优质工具。


WebUI for Browser Use
一个基于 Gradio 构建的 WebUI,支持与浏览器智能体进行便捷交互。
WebUI for Browser Use 是一个强大的项目,它集成了多种大型语言模型,支持自定义浏览器使用,具备持久化浏览器会话等功能。用户可以通过简洁友好的界面轻松控制浏览器智能体完成各类任务,无论是数据提取、网页导航还是表单填写等操作都能高效实现,有利于提高工作效率和获取信息的便捷性。该项目适合开发者、研究人员以及需要自动化浏览器操作的人群使用,在 SEO 优化方面,其关键词涵盖浏览器使用、WebUI、大型语言模型集成等,有助于提高网页在搜索引擎中的曝光度。


xiaozhi-esp32
基于 ESP32 的小智 AI 开发项目,支持多种网络连接与协议,实现语音交互等功能。
xiaozhi-esp32 是一个极具创新性的基于 ESP32 的开发项目,专注于人工智能语音交互领域。项目涵盖了丰富的功能,如网络连接、OTA 升级、设备激活等,同时支持多种语言。无论是开发爱好者还是专业开发者,都能借助该项目快速搭建起高效的 AI 语音交互系统,为智能设备开发提供强大助力。


olmocr
一个用于 OCR 的项目,支持多种模型和服务器进行 PDF 到 Markdown 的转换,并提供测试��和报告功能。
olmocr 是一个专注于光学字符识别(OCR)的 Python 项目,由 Allen Institute for Artificial Intelligence 开发。它支持多种模型和服务器,如 vllm、sglang、OpenAI 等,可将 PDF 文件的页面转换为 Markdown 格式。项目还提供了测试框架和 HTML 报告生成功能,方便用户对 OCR 结果进行评估和分析。适用于科研、文档处理等领域,有助于提高工作效率和准确性。


飞书多维表格
飞书多维表格 ×DeepSeek R1 满血版
飞书多维表格联合 DeepSeek R1 模型,提供 AI 自动化解决方案,支持批量写作、数据分析、跨模态处理等功能,适用于电商、短视频、影视创作等场景,提升企业生产力与创作效率。关键词:飞书多维表格、DeepSeek R1、AI 自动化、批量处理、企业协同工具。
推荐工具精选







AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号