Real3D: 突破性的大规模真实图像三维重建模型
 Ray
RayReal3D: 突破性的大规模真实图像三维重建模型
在计算机视觉和图形学领域,从单张2D图像重建3D场景一直是一个极具挑战性的任务。传统方法主要依赖于合成数据或多视图捕获的数据进行训练,这些数据虽然简化了训练过程,但难以扩展且不一定代表真实物体形状的分布。为了解决这些限制,研究人员提出了一种突破性的方法 - Real3D,这是首个可以使用单视图真实世界图像进行训练的大规模重建模型(LRM)系统。
Real3D的创新之处
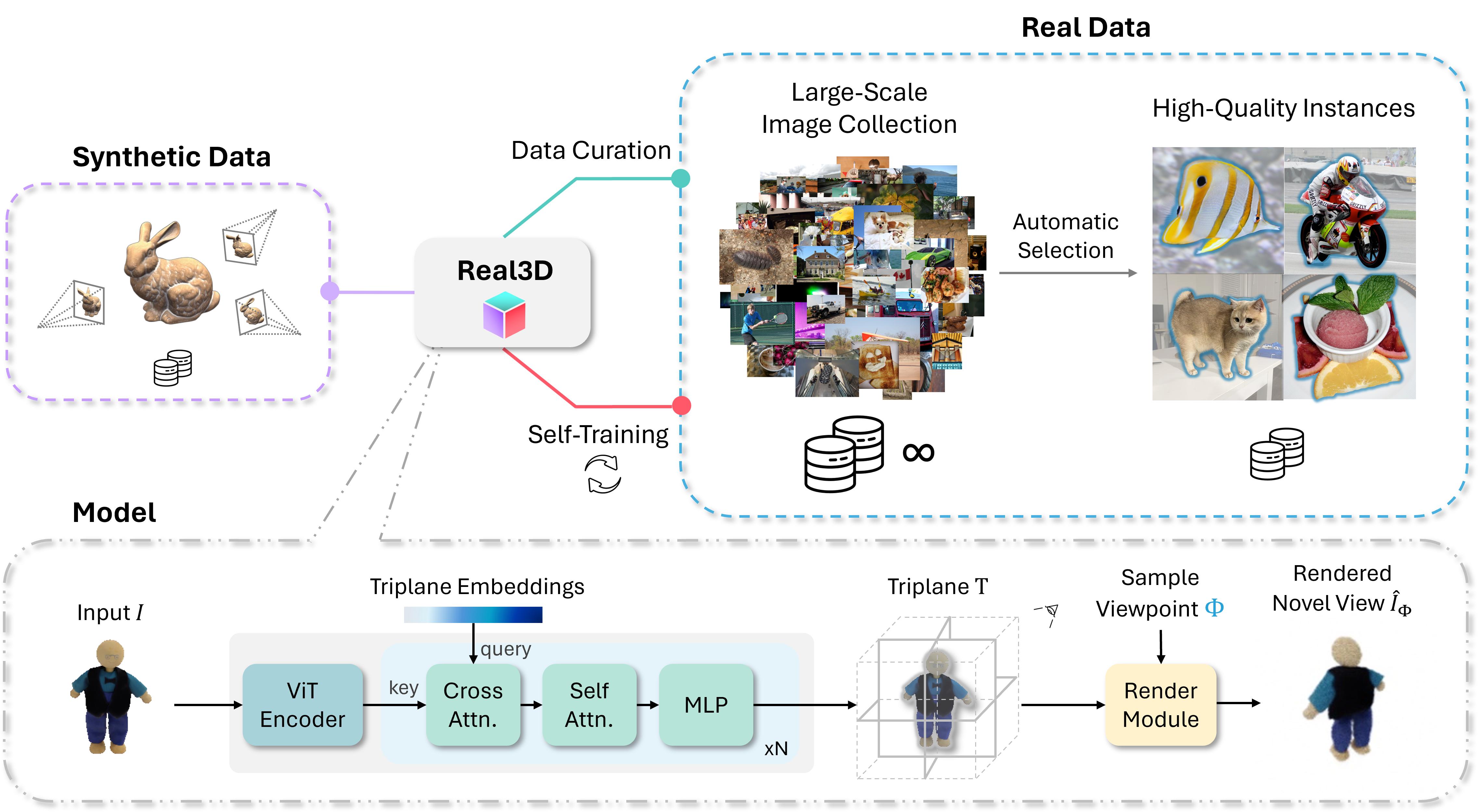
Real3D的核心创新在于其独特的自训练框架,能够同时利用现有的3D/多视图合成数据和多样化的单视图真实图像。这种方法不仅扩大了训练数据的规模,还提高了模型对真实世界物体的泛化能力。
研究团队提出了两种无监督损失函数,使得即使对于没有地面真值3D或新视角的训练样本,也能在像素级和语义级对LRM进行监督。这一突破性设计大大增加了可用于训练的数据量,使模型能够学习到更丰富、更真实的物体形状先验知识。
自动数据筛选
为了进一步提高性能并扩大图像数据规模,Real3D开发了一种自动数据筛选方法,用于从野外图像中收集高质量样本。这种方法不仅提高了训练数据的质量,还使得模型能够更好地适应各种真实场景。
实验结果
Real3D在四种不同的评估设置中均表现出色,这些设置包括真实和合成数据,以及领域内和领域外的形状。实验结果一致显示,Real3D在性能上优于现有方法,证明了其在处理多样化真实世界场景时的强大能力。
技术细节
Real3D的训练过程分为两个主要步骤:
- (可选)在Objaverse上微调TripoSR模型。这一步骤主要是为了解决TripoSR预测的3D形状具有随机尺度的问题。
- 在真实图像上进行自训练。这是Real3D的核心步骤,利用提出的无监督损失函数和自动数据筛选方法,从单视图真实图像中学习。
应用前景
Real3D的成功开发为许多应用领域带来了新的可能性:
- 增强现实(AR)和虚拟现实(VR): Real3D可以快速从单一图像重建3D场景,为AR和VR应用提供更真实、更丰富的内容。
- 机器人视觉: 使机器人能够更好地理解和导航复杂的3D环境。
- 自动驾驶: 提高车辆对周围环境的3D理解能力,增强安全性。
- 计算机辅助设计(CAD): 从产品照片快速生成3D模型,加速设计和原型制作过程。
- 文化遗产保护: 从历史建筑或文物的照片重建3D模型,用于数字保存和研究。
未来发展方向
尽管Real3D已经取得了显著成果,但研究团队表示还有进一步的改进空间:
- 继续扩大和优化真实世界训练数据集。
- 提高模型在极具挑战性的场景(如反射表面、透明物体)下的表现。
- 探索将Real3D与其他先进技术(如神经辐射场NeRF)结合的可能性。
- 优化模型性能,使其能够在消费级硬件上实时运行。
结论
Real3D代表了单视图3D重建领域的一个重要突破。通过创新的自训练框架和无监督损失函数,Real3D成功地将大规模重建模型的训练扩展到了真实世界的单视图图像。这不仅提高了模型的性能和泛化能力,还为解决真实世界中的复杂3D重建问题开辟了新的途径。
随着技术的不断发展和完善,我们可以期待看到Real3D及其衍生技术在更多领域中的应用,推动计算机视觉和3D重建技术向前发展。研究团队的开源精神也值得赞赏,这将加速相关技术的发展和应用。
对于有兴趣深入了解或尝试使用Real3D的读者,可以访问项目的GitHub仓库获取更多信息和代码资源。随着更多研究者和开发者的参与,我们有理由相信,基于真实图像的3D重建技术将迎来更加光明的未来。
编辑推荐精选


讯飞智文
一键生成PPT和Word,让学习生活更轻松
讯飞智文是一个利用 AI 技术的项目,能够帮助用户生成 PPT 以及各类文档。无论是商业领域的市场分析报告、年度目标制定,还是学生群体的职业生涯规划、实习避坑指南,亦或是活动策划、旅游攻略等内容,�它都能提供支持,帮助用户精准表达,轻松呈现各种信息。


讯飞星火
深度推理能力全新升级,全面对标OpenAI o1
科大讯飞的星火大模型,支持语言理解、知识问答和文本创作等多功能,适用于多种文件和业务场景,提升办公和日常生活的效率。讯飞星火是一个提供丰富智能服务的平台,涵盖科技资讯、图像创作、写作辅助、编程解答、科研文献解读等功能,能为不同需求的用户提供便捷高效的帮助,助力用户轻松获取信息、解决问题,满足多样化使用场景。


Spark-TTS
一种基于大语言模型的高效单流解耦语音令牌文本到语音合成模型
Spark-TTS 是一个基于 PyTorch 的开源文本到语音合成项目,由多个知名机构联合参与。该项目提供了高效的 LLM(大语言模型)驱动的语音合成方案,支持语音克隆和语音创建功能,可通过命令行界面(CLI)和 Web UI 两种方式使用。用户可以根据需求调整语音的性别、音高、速度等参数,生成高质量的语音。该项目适用于多种场景,如有声读物制作、智能语音助手开发等。


Trae
字节跳动发布的AI编程神器IDE
Trae是一种自适应的集成开发环境(IDE),通过自动化和多元协作改变开发流程。利用Trae,团队能够更快速、精确地编写和部署代码,从而提高编程效率和项目交付速度。Trae具备上下文感知和代码自动完成功能,是提升开发效率的理想工具。


咔片PPT
AI助力,做PPT更简单!
咔片是一款轻量化在线演示设计工具,借助 AI 技术,实现从内容生成到智能设计的一站式 PPT 制作服务。支持多种文档格式导入生成 PPT,提供海量模板、智能美化、素材替换等功能,适用于销售、教师、学生等各类人群,能高效制作出高品质 PPT,满足不同场景演示需求。


讯飞绘文
选题、配图、成文,一站式创作,让内容运营更��高效
讯飞绘文,一个AI集成平台,支持写作、选题、配图、排版和发布。高效生成适用于各类媒体的定制内容,加速品牌传播,提升内容营销效果。


材料星
专业的AI公文写作平台,公文写作神器
AI 材料星,专业的 AI 公文写作辅助平台,为体制内工作人员提供高效的公文写作解决方案。拥有海量公文文库、9 大核心 AI 功能,支持 30 + 文稿类型生成,助力快速完成领导讲话、工作总结、述职报告等材料,提升办公效率,是体制打工人的得力写作神器。


openai-agents-python
OpenAI Agents SDK,助力开发者便捷使用 OpenAI 相关功能。
openai-agents-python 是 OpenAI 推出的一款强大 Python SDK,它为开发者提供了与 OpenAI 模型交互的高效工具,支持工具调用、结果处理、追踪等功能,涵盖多种应用场景,如�研究助手、财务研究等,能显著提升开发效率,让开发者更轻松地利用 OpenAI 的技术优势。


Hunyuan3D-2
高分辨率纹理 3D 资产生成
Hunyuan3D-2 是腾讯开发的用于 3D 资产生成的强大工具,支持从文本描述、单张图片或多视角图片生成 3D 模型,具备快速形状生成能力,可生成带纹理的高质量 3D 模型,适用于多个领域,为 3D 创作提供了高效解决方案。


3FS
一个具备存储、管理和客户端操作等多种功能的分布式文件系统相关项目。
3FS 是一个功能强大的分布式文件系统项目,涵盖了存储引擎、元数据管理、客户端工具等多个模块。它支持多种文件操作,如创建文件和目录、设置布局等,同时具备高效的事件循环、节点选择和协程池管理等特性。适用于需要大规模数据存储和管理的场景,能够提高系统的性能和可靠性,是分布式存储领域的优质解决方案。
推荐工具精选




AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号