robosuite: 一个模块化的机器人学习仿真框架与基准测试平台
 Ray
Rayrobosuite简介
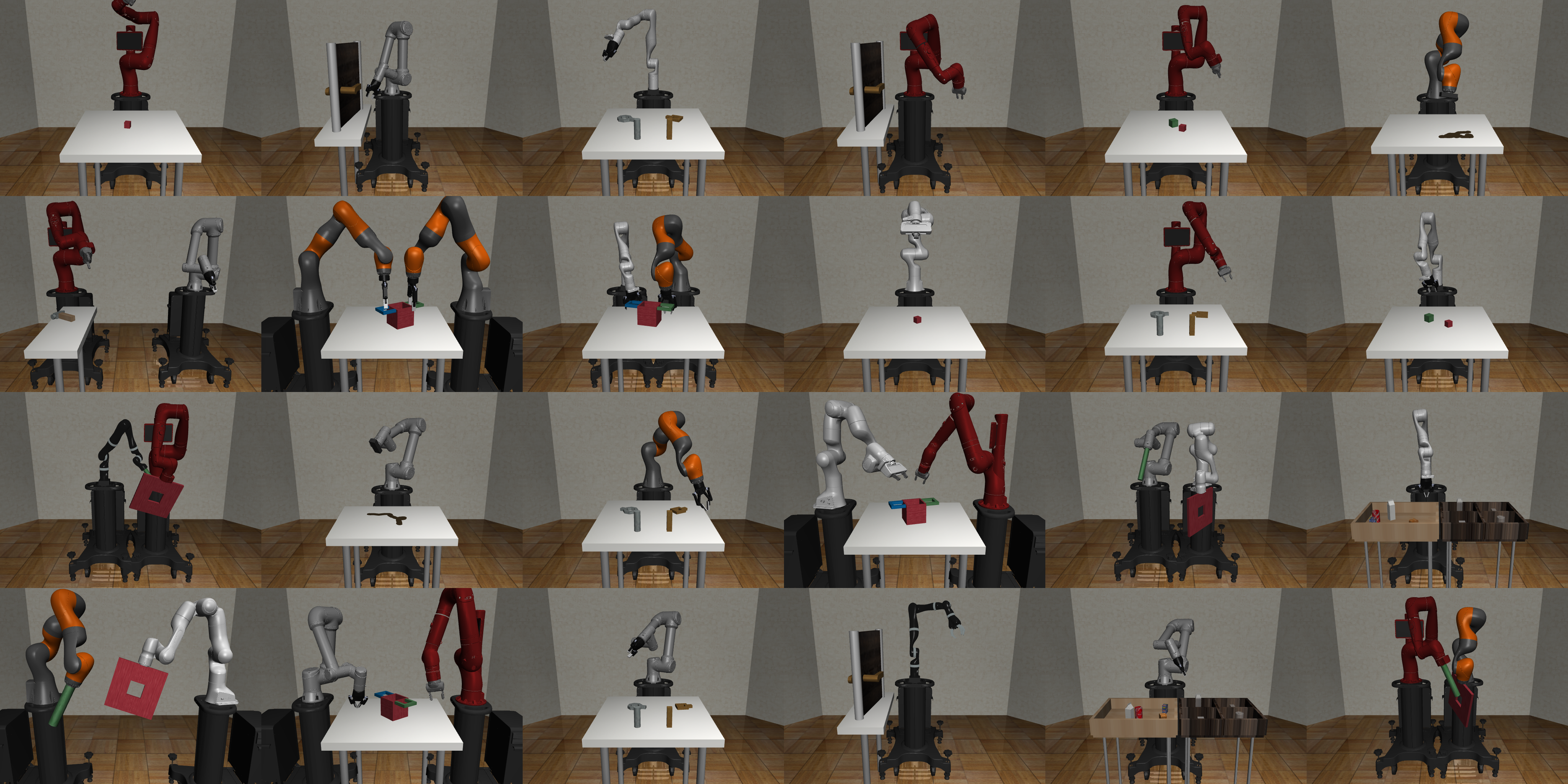
robosuite是由斯坦福大学视觉与学习实验室(SVL)和德克萨斯大学奥斯汀分校机器人感知与学习实验室(RPL)开发和维护的一个开源机器人学习仿真框架。它基于MuJoCo物理引擎,为机器人学习研究提供了一个强大而灵活的仿真平台。
robosuite的主要目标是为研究人员提供:
- 一套标准化的基准任务,用于严格评估算法性能和开发新算法;
- 模块化设计,方便创建新的机器人仿真环境;
- 高质量的机器人控制器实现和现成的学习算法,降低入门门槛。
这个框架最初于2017年底由SVL的研究人员开发,作为机器人学习研究的内部工具。现在它已经成为一个活跃的开源项目,欢迎社区贡献。
主要特性
robosuite的最新版本(v1.4)具有以下主要特性:
-
标准化任务: 提供多样化、难度各异的标准操作任务集,以及用于可复现研究的强化学习基准结果。
-
程序化生成: 模块化API,可以通过组合机器人模型、场景和参数化3D对象来编程创建新的环境和任务。
-
机器人控制器: 多种控制器类型,如关节空间速度控制、逆运动学控制、操作空间控制,以及用于远程操作的3D运动设备。
-
多模态传感器: 异构的感知信号类型,包括低级物理状态、RGB相机、深度图和本体感受。
-
人类示范: 用于收集人类示范、重放示范数据集以及利用示范数据进行学习的实用工具。
-
真实感渲染: 集成了先进的图形工具,可以实时提供仿真场景的真实感渲染。
框架组成
robosuite包含以下主要组件:
- 7种机器人模型
- 8种抓取器模型
- 6种控制器模式
- 9种标准化任务
此外,它还提供了用于通过程序化生成构建新环境的模块化API设计。
最新更新
robosuite的最新版本是v1.4,于2022年11月15日发布。主要更新包括:
- 后端迁移到DeepMind官方的MuJoCo Python绑定
- 添加了机器人纹理
- 修复了一些bug
之前的重要版本更新包括:
- v1.3(2021年10月):添加了光线追踪和基于物理的渲染工具,以及额外的视觉模态访问
- v1.2(2021年2月):添加了可观测的传感器模型和动力学随机化
- v1.1(2020年12月):重构了基础架构,标准化了模型类,大大简化了环境原型设计
使用场景
robosuite主要面向以下应用场景:
-
强化学习研究: 提供标准化的任务和环境,用于开发和评估强化学习算法。
-
模仿学习: 通过人类示范数据收集和重放功能,支持模仿学习研究。
-
机器人控制: 实现了多种机器人控制器,可用于研究不同的控制策略。
-
计算机视觉: 集成真实感渲染,支持基于视觉的机器人学习研究。
-
任务和环境设计: 模块化API使研究人员能够轻松创建自定义任务和环境。
-
benchmark测试: 标准化的任务集可用于对比不同算法的性能。
安装和使用
要安装robosuite,您可以使用pip:
pip install robosuite
对于开发版本,可以直接从GitHub克隆仓库:
git clone https://github.com/ARISE-Initiative/robosuite.git cd robosuite pip install -e .
安装完成后,您可以通过以下方式创建一个简单的环境:
import robosuite as suite # 创建Lift任务环境 env = suite.make( env_name="Lift", robots="Panda", has_renderer=True, has_offscreen_renderer=False, use_camera_obs=False, ) # 重置环境 obs = env.reset() # 循环交互 for i in range(1000): action = env.action_space.sample() # 随机动作 obs, reward, done, info = env.step(action) # 执行动作 env.render() # 渲染当前帧
未来展望
robosuite作为一个活跃的开源项目,未来可能会有以下方向的发展:
- 增加更多的机器人模型和任务类型
- 改进物理仿真的准确性和效率
- 加强与其他机器学习框架的集成
- 提供更多的预训练模型和基准结果
- 增强真实机器人的迁移能力
结语
robosuite为机器人学习研究提供了一个强大而灵活的仿真平台。它不仅降低了入门门槛,还通过标准化的任务和环境促进了研究��的可复现性。无论您是机器人学习的新手还是经验丰富的研究人员,robosuite都能为您的研究提供有力支持。我们期待看到更多基于robosuite的创新研究成果,推动机器人智能的进步。
访问robosuite官网以了解更多信息,或查看GitHub仓库参与项目开发。让我们一起探索机器人学习的无限可能!
编辑推荐精选

AEE
AI Excel全自动制表工具
AEE 在线 AI 全自动 Excel 编辑器,提供智能录入、自动公式、数据整��理、图表生成等功能,高效处理 Excel 任务,提升办公效率。支持自动高亮数据、批量计算、不规则数据录入,适用于企业、教育、金融等多场景。


UI-TARS-desktop
基于 UI-TARS 视觉语言模型的桌面应用,可通过自然语言控制计算机进行多模态操作。
UI-TARS-desktop 是一款功能强大的桌面应用,基于 UI-TARS(视觉语言模型)构建。它具备自然语言控制、截图与视觉识别、精确的鼠标键盘控制等功能,支持跨平台使用(Windows/MacOS),能提供实时反馈和状态显示,且数据完全本地处理,保障隐私安全。该应用集成了多种大语言模型和搜索方式,还可进行文件系统操作。适用于需要智能交互和自动化任务的场景,如信息检索、文件管理等。其提供了详细的文档,包括快速启动、部署、贡献指南和 SDK 使用说明等,方便开发者使用和扩展。


Wan2.1
开源且先进的大规模视频生成模型项目
Wan2.1 是一个开源且先进的大规模视频生成模型项目,支持文本到图像、文本到视频、图像到视频等多种生成任务。它具备丰富的配置选项,可调整分辨率、扩散步数等参数,还能对提示词进行增强。使用了多种先进技术和工具,在视频和图像生成领域具有广泛应用前景,适合研究人员和开发者使用。


爱图表
全流程 AI 驱动的数据可视化工具,助力用户轻松创作高颜值图表
爱图表(aitubiao.com)就是AI图表,是由镝数科技推出的一款创新型智能数据可视化平台,专注于为用户提供便捷的图表生成、数据分析和报告撰写服务。爱图表是中国首个在图表场景接入DeepSeek的产品。通过接入前沿的DeepSeek系列AI模型,爱图表结合强大的数据处理能力与智能化功能,致力于帮助职场人士高效处理和表达数据,提升工作效率和报告质量。


Qwen2.5-VL
一款强大的视觉语言模型,支持图像和视频输入
Qwen2.5-VL 是一款强大的视觉语言模型,支持图像和视频输入,可用于多种场景,如商品特点总结、图像文字识别等。项目提供了 OpenAI API 服务、Web UI 示例等部署方式,还包含了视觉处理工具,有助于开发者快速集成和使用,提升工作效率。


HunyuanVideo
HunyuanVideo 是一个可基于文本生成高质量图像和视频的项目。
HunyuanVideo 是一个专注于文本到图像及视频生成的项目。它具备强大的视频生成能力,支持多种分辨率和视频长度选择,能根据用户输入的文本生成逼真的图像和视频。使用先进的技术架构和算法,可灵活调整生成参数,满足不同场景的需求,是文本生成图像视频领域的优质工具。


WebUI for Browser Use
一个基于 Gradio 构建的 WebUI,支持与浏览器智能体进行便捷交互。
WebUI for Browser Use 是一个强大的项目,它集成了多种大型语言模型,支持自定义浏览器使用,具备持久化浏览器会话等功能。用户可以通过简洁友好的界面轻松控制浏览器智能体完成各类任务,无论是数据提取、网页导航还是表单填写等操作都能高效实现,有利于提高工作效率和获取信息的便捷性。该项目适合开发者、研究人员以及需要自动化浏览器操作的人群使用,在 SEO 优化方面,其关键词涵盖浏览器使用、WebUI、大型语言模型集成等,有助于提高网页在搜索引擎中的曝光度。


xiaozhi-esp32
基于 ESP32 的小智 AI 开发项目,支持多种网络连接与协议,实现语音交互等功能。
xiaozhi-esp32 是一个极具创新性的基于 ESP32 的开发项目,专注于人工智能语音交互领域。项目涵盖了丰富的功能,如网络连接、OTA 升级、设备激活等,同时支持多种语言。无论是开发爱好者还是专业开发者,都能借助该项目快速搭建起高效的 AI 语音交互系统,为智能设备开发提供强大助力。


olmocr
一个用于 OCR 的项目,支持多种模型和服务器进行 PDF 到 Markdown 的转换,并提供测试和报告功能。
olmocr 是一个专注于光学字符识别(OCR)的 Python 项目,由 Allen Institute for Artificial Intelligence 开发。它支持多种模型和服务器,如 vllm、sglang、OpenAI 等,可将 PDF 文件的页面转换为 Markdown 格式。项目还提供了测试框架和 HTML 报告生成功能,方便用户对 OCR 结果进行评估和分析。适用于科研、文档处理等领域,有助于提高工作效率和准确性。


飞书多维表格
飞书多维表格 ×DeepSeek R1 满血版
飞书多维表格联合 DeepSeek R1 模型,提供 AI 自动化解决方案,支持批量写作、数据分析、跨模态处理等功能,适用于电商、短视频、影视创作等场景,提升企业生产力与创作效率。关键词:飞书多维表格、DeepSeek R1、AI 自动化、批量处理、企业协同工具。
推荐工具精选







AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号