
SOLO算法简介
SOLO(Segmenting Objects by Locations)是由王新龙等人于2020年提出的一种全新的实例分割算法。与传统的基于检测框的方法不同,SOLO通过直接预测对象的位置和掩码来实现实例分割,开创了一种全新的技术路线。
SOLO算法最大的特点就是完全摆脱了检测框的限制。它采用全卷积网络结构,直接从图像输入预测实例掩码和类别概率,不需要任何中间步骤如区域提议或非极大值抑制。这种端到端的设计使得SOLO在速度和精度上都取得了显著提升。
SOLO算法的主要优势
SOLO算法相比传统方法具有以下几个主要优势:
-
完全无框设计: SOLO完全摆脱了检测框的限制,不受锚框位置和尺度的约束,能够更加灵活地处理各种形状的目标。
-
直接实例分割: SOLO直接从输入图像预测实例掩码和类别概率,无需复杂的中间步骤,大大简化了实例分割的流程。
-
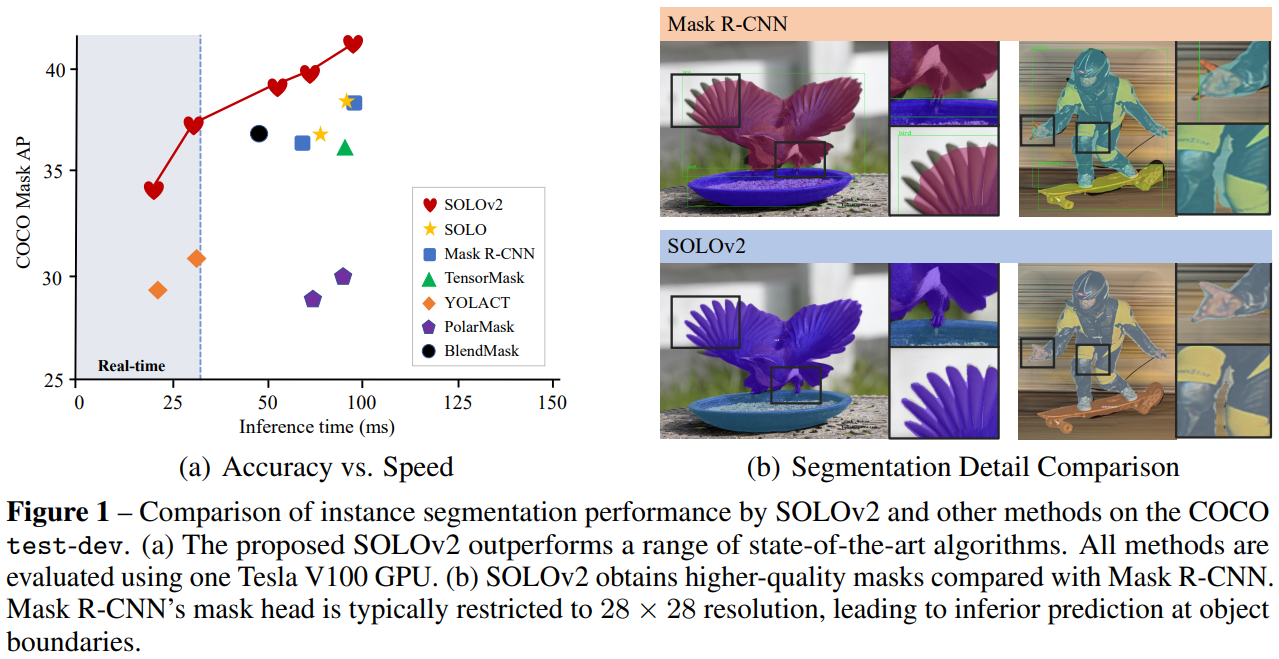
高质量掩码预测: 特别是SOLOv2版本,能够预测非常精细和详细的实例掩码,尤其是在目标边界处的表现更加出色。
-
领先的性能: 基于ResNet-101和可变形卷积的SOLO模型在COCO测试集上达到了41.7% AP的优异性能。同时轻量级版本也能在31.3 FPS的速度下实现37.1% AP。
-
灵活性强: SOLO完全基于FCN设计,继承了FCN的诸多优点,如全卷积结构、位置敏感性等。
SOLO算法的核心思想
SOLO算法的核心思想是将实例分割问题转化为在网格上预测每个位置是否包含目标中心点,以及相应的实例掩码。具体来说,SOLO算法包括以下几个关键步骤:
-
网格划分: 将输入图像划分为S×S的网格。
-
中心点预测: 对每个网格预测是否包含目标实例的中心点。
-
掩码生成: 对每个预测为正的网格位置,生成相应的实例掩码。
-
类别预测: 同时预测每个实例的类别。
-
后处理: 通过简单的阈值化和矩阵乘法得到最终的实例分割结果。
这种设计使得SOLO能够以一种简洁高效的方式实现实例分割,避免了繁琐的中间步骤和后处理过程。
SOLOv2的改进
在SOLO的基础上,作者又提出了改进版本SOLOv2,进一步提升了算法的性能和效率。SOLOv2的主要改进包括:
-
动态掩码生成: 引入了动态卷积来生成实例掩码,提高了掩码质量和计算效率。
-
矩阵NMS: 提出了一种新的非极大值抑制方法,可以并行处理所有实例。
-
坐标特征: 引入了坐标特征来增强位置敏感性。
-
掩码微调: 采用了掩码微调模块来进一步优化掩码质量。
这些改进使得SOLOv2在保持高效率的同时,进一步提升了分割精度,特别是在目标边界处的表现更加出色。
SOLO系列模型的性能
SOLO系列模型在COCO数据集上展现了优异的性能。以下是一些代表性模型的性能数据:
| 模型 | 训练策略 | 推理时间 | AP (minival) |
|---|---|---|---|
| SOLO_R50_1x | 单尺度 | 77ms | 32.9 |
| SOLO_R101_3x | 多尺度 | 86ms | 37.1 |
| SOLOv2_R50_3x | 多尺度 | 54ms | 37.5 |
| SOLOv2_R101_DCN_3x | 多尺度 | 97ms | 41.4 |
此外,SOLO还提供了一系列轻量级模型,如SOLOv2_Light_448_R50_3x,可以在24ms的推理时间内达到33.7的AP,非常适合实时应用场景。
SOLO的应用与部署
SOLO算法不仅在学术界取得了广泛关注,在工业界也有很大的应用潜力。它可以应用于众多计算机视觉任务中,如:
- 自动驾驶中的场景理解
- 医学图像分析
- 机器人视觉
- 视频监控
- 增强现实等
为了方便研究者和开发者使用SOLO算法,作者提供了完整的代码实现和预训练模型。SOLO的官方实现基于mmdetection框架,支持PyTorch环境。此外,还提供了PaddlePaddle版本的实现。
使用SOLO进行推理非常简单,只需几行代码即可完成:
from mmdet.apis import init_detector, inference_detector
import mmcv
config_file = 'configs/solo/solo_r50_fpn_8gpu_1x.py'
checkpoint_file = 'SOLO_R50_1x.pth'
# 初始化模型
model = init_detector(config_file, checkpoint_file, device='cuda:0')
# 进行推理
img = 'test.jpg'
result = inference_detector(model, img)
# 可视化结果
model.show_result(img, result, out_file='result.jpg')
SOLO的未来发展
尽管SOLO已经取得了显著的成果,但实例分割领域仍然存在许多挑战和机会。未来SOLO算法可能的发展方向包括:
-
进一步提高效率: 优化网络结构和算法,使其能够在更低端的硬件上实时运行。
-
提升小目标性能: 改进算法以更好地处理小尺寸和密集目标。
-
跨域泛化: 提高模型在不同数据集和场景之间的泛化能力。
-
弱监督学习: 探索使用更少的标注数据来训练模型。
-
与其他任务结合: 将实例分割与目标跟踪、姿态估计等任务结合,实现更复杂的视觉理解。
结语
SOLO算法为实例分割领域带来了新的思路和突破。它摒弃了传统的基于检测框的方法,直接从图像预测实例掩码,大大简化了实例分割的流程。通过一系列创新设计,SOLO在速度和精度上都取得了显著提升,为实例分割任务的实际应用提供了有力支持。
随着计算机视觉技术的不断发展,我们有理由相信,SOLO算法还将继续evolve,为更多的应用场景提供高效、准确的实例分割解决方案。无论是在学术研究还是工业应用中,SOLO都展现出了巨大的潜力,值得我们持续关注和探索。
参考资料
- SOLO: Segmenting Objects by Locations
- SOLOv2: Dynamic and Fast Instance Segmentation
- SOLO GitHub Repository
- mmdetection
希望这篇文章能够帮助读者深入理解SOLO算法的核心思想和主要特点。如果您对SOLO算法有任何疑问或见解,欢迎在评论区留言讨论。让我们一起推动计算机视觉技术的进步,为人工智能的发展贡献力量! 🚀🔬🖥️









