
SSD: PyTorch中的单发多框目标检测器实现
SSD (Single Shot MultiBox Detector) 是一种高效的单阶段目标检测算法,由Wei Liu等人在2016年提出。本文将详细介绍SSD算法的PyTorch实现,包括其原理、网络结构、训练过程以及性能表现。
SSD算法简介
SSD是一种单阶段目标检测算法,它直接在特征图上进行边界框回归和类别预测,无需额外的区域提议步骤。SSD的主要特点包括:
- 使用多尺度特征图进行检测,可以检测不同大小的目标
- 采用默认框(default boxes)和非极大值抑制(NMS)来处理多个预测
- 使用小卷积滤波器在特征图上滑动以预测类别得分和边界框偏移
- 训练时使用难例挖掘来处理正负样本不平衡问题
这些特点使得SSD在保持较高检测精度的同时,能够实现实时的检测速度。
网络结构
SSD300模型的基础网络采用VGG16,去掉全连接层,并将最后两个全连接层转换为卷积层。在基础网络之后,添加了额外的卷积层来获取多尺度特征图。SSD300的网络结构如下图所示:
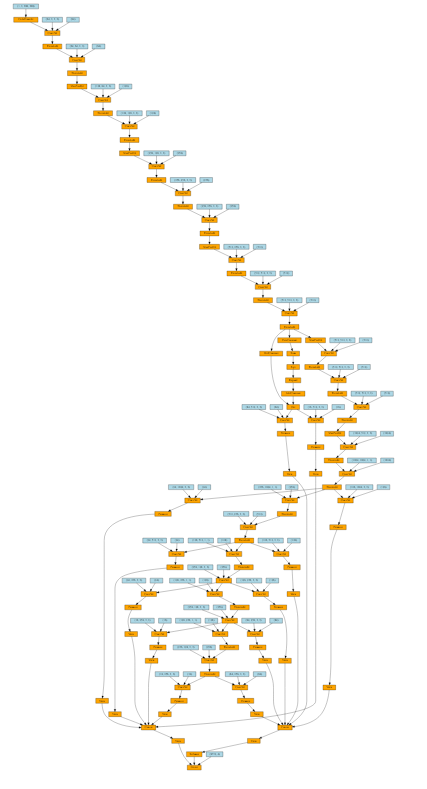
主要包括以下几个部分:
- 基础网络(Base Network): 使用VGG16的前面几层作为特征提取器
- 额外层(Extra Layers): 在基础网络之后添加的卷积层,用于获取多尺度特征图
- 检测头(Detection Heads): 在不同尺度的特征图上应用3x3卷积进行类别预测和边界框回归
训练过程
SSD的训练过程包括以下几个关键步骤:
-
数据准备:
- 支持PASCAL VOC和COCO数据集
- 使用数据增强技术,如随机裁剪、翻转、颜色抖动等
-
损失函数:
- 分类损失: 使用交叉熵损失
- 定位损失: 使用Smooth L1损失
- 总损失 = 分类损失 + α * 定位损失
-
难例挖掘:
- 对负样本进行困难负样本挖掘,保持正负样本比例为1:3
-
优化器:
- 使用SGD优化器,初始学习率为1e-3
- 采用学习率衰减策略
-
训练细节:
- 批量大小为32
- 在VOC0712数据集上训练120k次迭代
性能评估
在PASCAL VOC2007测试集上,SSD300模型取得了以下性能:
- mAP: 77.43%
- FPS: 在GTX 1060上约45.45 FPS
与原始Caffe实现相比,PyTorch版本的SSD300模型性能相当,甚至略有提升。
演示与应用
SSD.PyTorch项目提供了多种演示和应用方式:
-
Jupyter Notebook演示:
- 提供了交互式的目标检测演示
- 可以上传自己的图片进行检测
-
网络摄像头实时检测:
- 支持使用网络摄像头进行实时目标检测
- 可在CPU或NVIDIA GPU上运行
-
预训练模型:
- 提供了在VOC0712数据集上训练的SSD300模型
- 可直接下载使用,方便快速部署
未来工作
SSD.PyTorch项目的未来计划包括:
- 支持MS COCO数据集的训练和测试
- 实现SSD512版本的训练和测试
- 支持自定义数据集的训练
总结
SSD算法凭借其简单高效的特点,成为目标检测领域的重要算法之一。本文介绍的PyTorch实现不仅复现了原始论文的性能,还提供了丰富的训练和演示工具,为研究者和开发者提供了便利。随着深度学习和计算机视觉技术的不断发展,我们期待看到SSD算法在更多领域的应用和优化。














