
Vista: 为自动驾驶打造的通用世界模型
近日,由上海人工智能实验室等机构的研究人员开发的自动驾驶世界模型Vista引起了业界的广泛关注。这个创新性的项目旨在解决自动驾驶领域中的一些关键挑战,为未来更安全、更智能的自动驾驶系统铺平道路。
Vista的核心特性
Vista作为一个通用的驾驶世界模型,具有以下几个突出的特点:
-
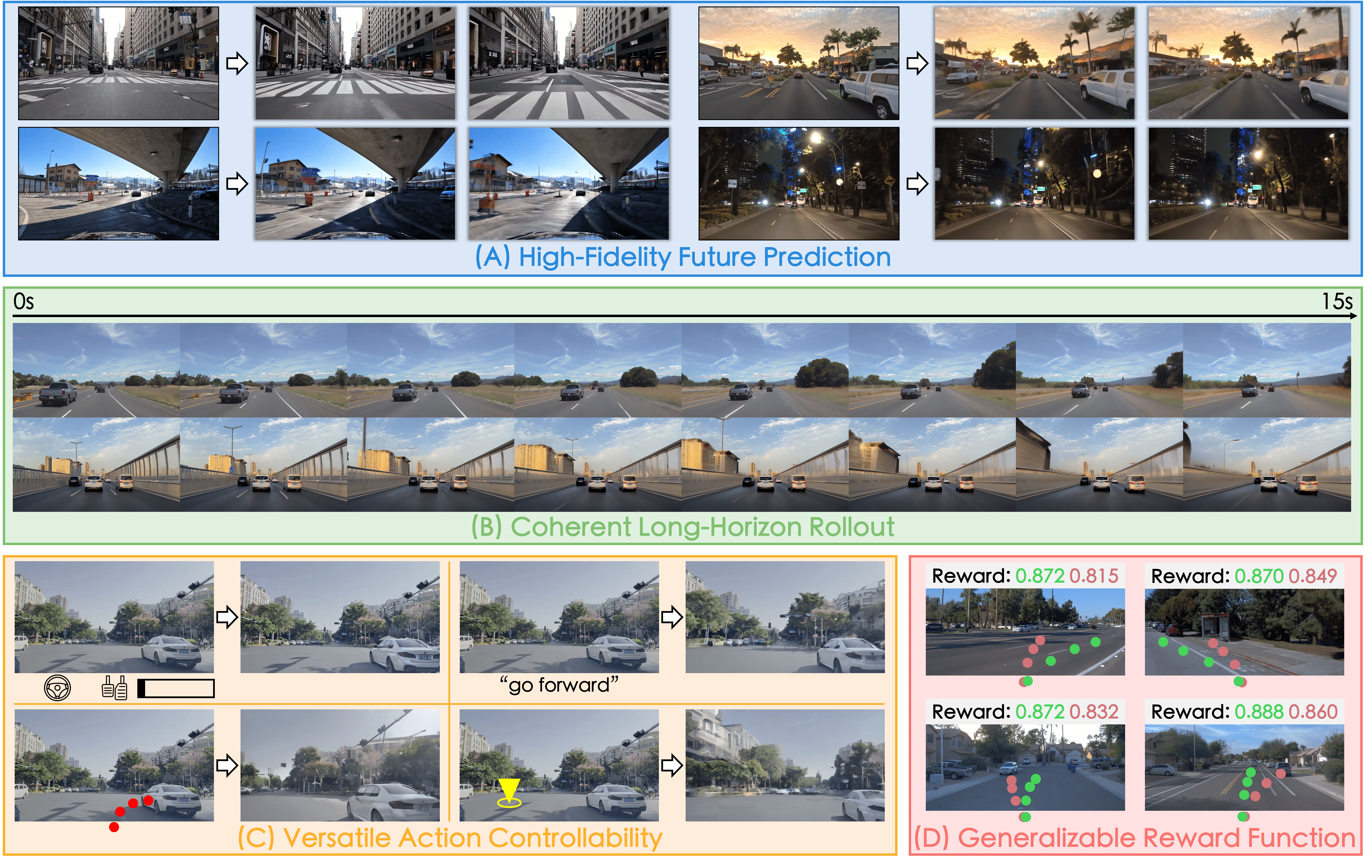
高保真度预测: Vista能够在各种复杂的驾驶场景中预测高度逼真的未来状态。无论是城市街道还是高速公路,它都能准确捕捉环境的动态变化。
-
长时间预测: 与传统模型不同,Vista可以将其预测扩展到连续的长时间范围,为自动驾驶系统提供更长远的规划能力。
-
多模态动作执行: Vista支持执行多种类型的动作,包括转向角度、速度、指令、轨迹和目标点等。这种灵活性使其能够适应各种驾驶策略和场景需求。
-
动作奖励评估: Vista能够为不同的动作提供奖励信号,而无需访问真实动作的ground truth数据。这一特性极大地促进了自动驾驶算法的训练和优化。
技术创新与实现
Vista的成功离不开其背后的技术创新。研究团队采用了先进的深度学习和计算机视觉技术,结合大规模的驾驶数据集,训练出了这个功能强大的世界模型。
一些关键的技术亮点包括:
-
生成式AI: Vista利用了最新的生成式AI技术,能够生成高质量、连续的未来场景预测。
-
多模态融合: 模型整合了视觉、雷达、GPS等多种传感器数据,形成对环境的全面理解。
-
可控性设计: Vista的架构设计使其具有高度的可控性,能够根据不同的输入动作生成相应的未来预测。
-
长期一致性: 通过特殊的网络结构和训练策略,Vista保证了长时间预测的一致性和合理性。
应用前景与影响
Vista的出现为自动驾驶领域带来了新的可能性。它可能在以下几个方面产生重大影响:
-
提升决策能力: 通过对未来的准确预测,自动驾驶系统可以做出更加明智和安全的决策。
-
加速算法开发: Vista提供的模拟环境和奖励机制可以大大加速自动驾驶算法的开发和测试过程。
-
降低实车测试成本: 高保真的模拟能力可以减少实际道路测试的需求,降低开发成本和风险。
-
推动标准化: Vista可能成为自动驾驶系统评估的标准工具,促进行业标准的制定。

未来发展方向
尽管Vista已经展现出了令人印象深刻的能力,但研究团队表示,这只是一个开始。他们计划在以下几个方面继续推进研究:
-
提升模型性能: 通过更大的批量大小和更多的迭代训练,进一步提高模型的准确性和稳定性。
-
优化内存效率: 开发更加内存高效的训练和采样方法,使模型能够在更广泛的硬件上运行。
-
在线演示: 开发交互式的在线演示,让更多人能够直观地体验Vista的能力。
-
扩展应用场景: 将Vista的应用扩展到更多的自动驾驶相关任务中,如路径规划、风险评估等。
开源与社区协作
值得一提的是,Vista项目采用了开源的方式,其代码和模型权重都可以在GitHub上获取。这种开放的态度不仅有助于推动技术的快速发展,也为整个自动驾驶社区提供了宝贵的资源。
研究团队鼓励其他研究者和开发者基于Vista进行进一步的研究和应用开发。通过社区的共同努力,Vista有望在未来发展成为自动驾驶领域的重要基础设施。
结语
Vista的出现无疑为自动驾驶技术的发展注入了新的活力。它展示了AI技术在复杂实际问题中的巨大潜力,也为未来更安全、更智能的交通系统描绘了一幅美好的蓝图。
随着研究的不断深入和社区的积极参与,我们有理由相信,Vista将继续evolve,成为推动自动驾驶技术进步的重要力量。它的发展不仅关乎技术创新,更关乎未来城市交通的面貌,值得我们持续关注。









