




neurodiffeq





引用
@article{chen2020neurodiffeq,
title={NeuroDiffEq: A Python package for solving differential equations with neural networks},
author={Chen, Feiyu and Sondak, David and Protopapas, Pavlos and Mattheakis, Marios and Liu, Shuheng and Agarwal, Devansh and Di Giovanni, Marco},
journal={Journal of Open Source Software},
volume={5},
number={46},
pages={1931},
year={2020}
}
🔥🔥🔥你知道吗?neurodiffeq支持解决方案包并可用于解决反向问题!点击这里查看!
:mortar_board: 已经熟悉neurodiffeq了吗? :point_down: 跳转到常见问题。
简介
neurodiffeq是一个使用神经网络求解微分方程的软件包。微分方程是将某个函数与其导数相关联的方程。它们在各种科学和工程领域中出现。传统上,这些问题可以通过数值方法(如有限差分、有限元)来解决。虽然这些方法有效且足够,但它们的表达能力受到函数表示的限制。如果我们能够计算出连续且可微的微分方程解,那将会很有意思。
作为通用函数逼近器,人工神经网络已被证明具有解决具有特定初始/边界条件的常微分方程(ODE)和偏微分方程(PDE)的潜力。neurodiffeq的目标是实现这些使用ANN求解微分方程的现有技术,使软件具有足够的灵活性,可以处理各种用户定义的问题。
安装
使用pip
与大多数标准库一样,neurodiffeq托管在PyPI上。要安装最新的稳定版本,请运行:
pip install -U neurodiffeq # '-U'表示更新到最新版本
手动安装
或者,你可以手动安装库以获取我们新功能的早期访问权。这是希望为库做出贡献的开发者推荐的方式。
git clone https://github.com/NeuroDiffGym/neurodiffeq.git cd neurodiffeq && pip install -r requirements pip install . # 如果要对库进行更改,请使用`pip install -e .` pytest tests/ # 运行测试。可选。
入门
我们很乐意解答你的任何问题。同时,你可以查看常见问题。
要查看neurodiffeq的完整教程和文档,请查看官方文档。
除了文档之外,我们最近还制作了一个快速入门的演示视频和幻灯片。
使用示例
导入
from neurodiffeq import diff from neurodiffeq.solvers import Solver1D, Solver2D from neurodiffeq.conditions import IVP, DirichletBVP2D from neurodiffeq.networks import FCNN, SinActv
ODE系统示例
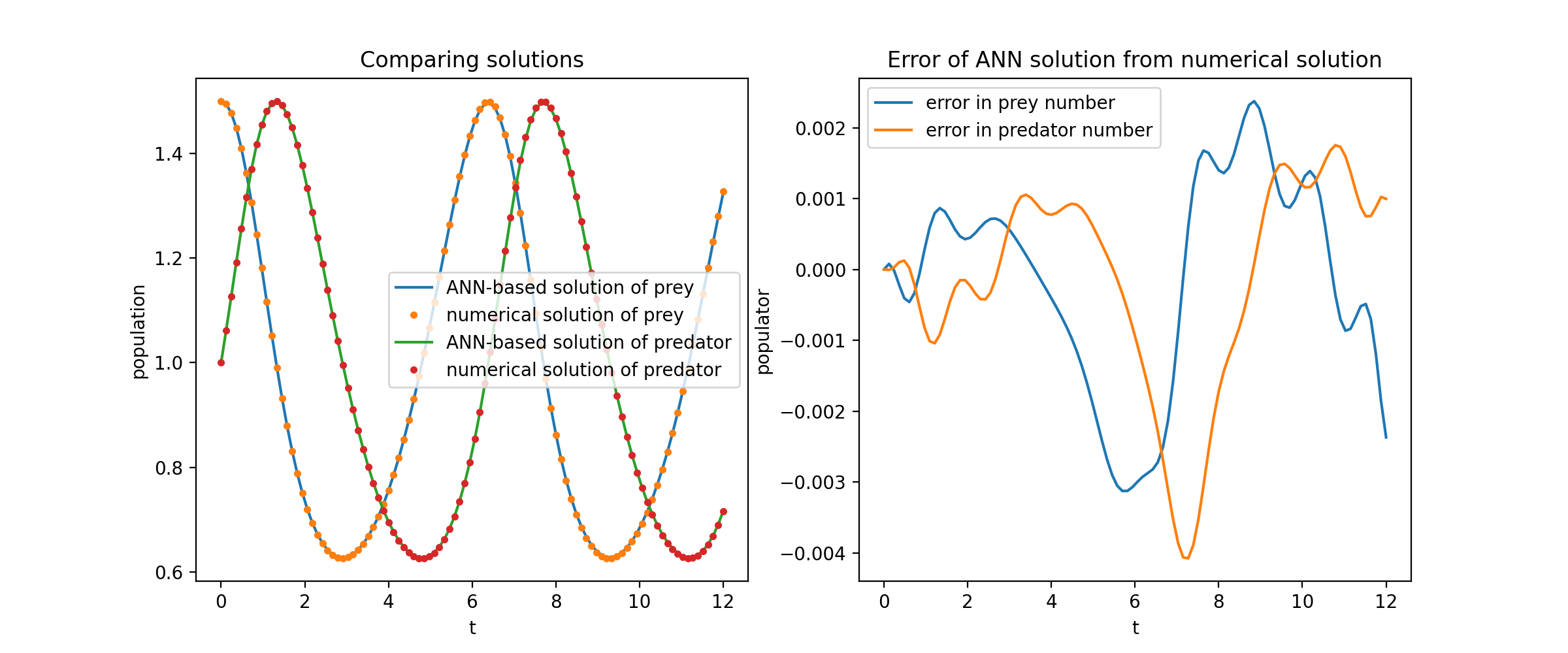
这里我们解决一个非线性的两个ODE系统,称为Lotka–Volterra方程。有两个未知函数(u和v)和一个独立变量(t)。
def ode_system(u, v, t): return [diff(u,t)-(u-u*v), diff(v,t)-(u*v-v)] conditions = [IVP(t_0=0.0, u_0=1.5), IVP(t_0=0.0, u_0=1.0)] nets = [FCNN(actv=SinActv), FCNN(actv=SinActv)] solver = Solver1D(ode_system, conditions, t_min=0.1, t_max=12.0, nets=nets) solver.fit(max_epochs=3000) solution = solver.get_solution()
solution是一个可调用对象,你可以向它传递numpy数组或torch��张量,如:
u, v = solution(t, to_numpy=True) # t可以是np.ndarray或torch.Tensor
将u和v与它们的解析解进行对比绘图,得到类似这样的结果:
PDE系统示例
这里我们在一个矩形上解带有Dirichlet边界条件的拉普拉斯方程。注意,我们选择拉普拉斯方程是因�为它计算解析解的简单性。在实际应用中,你可以尝试任何非线性、混沌的PDE,只要你能够充分调整求解器。
求解2-D PDE系统与求解ODE非常相似,只是边值问题有两个变量x和y,或者初始边值问题有x和t,这两种情况都支持。
def pde_system(u, x, y): return [diff(u, x, order=2) + diff(u, y, order=2)] conditions = [ DirichletBVP2D( x_min=0, x_min_val=lambda y: torch.sin(np.pi*y), x_max=1, x_max_val=lambda y: 0, y_min=0, y_min_val=lambda x: 0, y_max=1, y_max_val=lambda x: 0, ) ] nets = [FCNN(n_input_units=2, n_output_units=1, hidden_units=(512,))] solver = Solver2D(pde_system, conditions, xy_min=(0, 0), xy_max=(1, 1), nets=nets) solver.fit(max_epochs=2000) solution = solver.get_solution()
二维偏微分方程的solution签名与常微分方程略有不同。同样,它接受NumPy数组或PyTorch张量作为输入。
u = solution(x, y, to_numpy=True)
在[0,1] × [0,1]区间上评估u得到以下图形
| 基于ANN的解 | PDE的残差 |
|---|---|
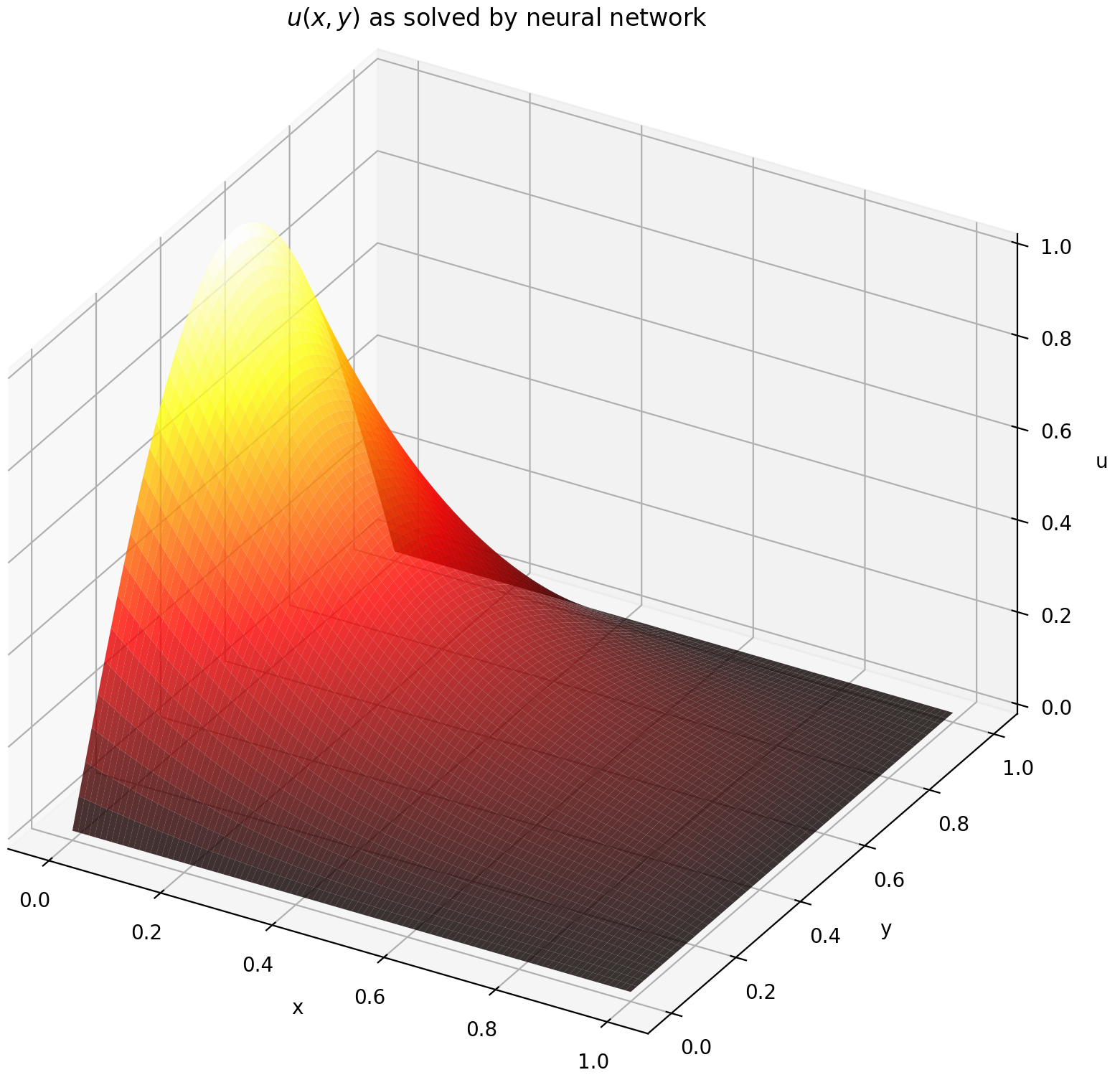 | 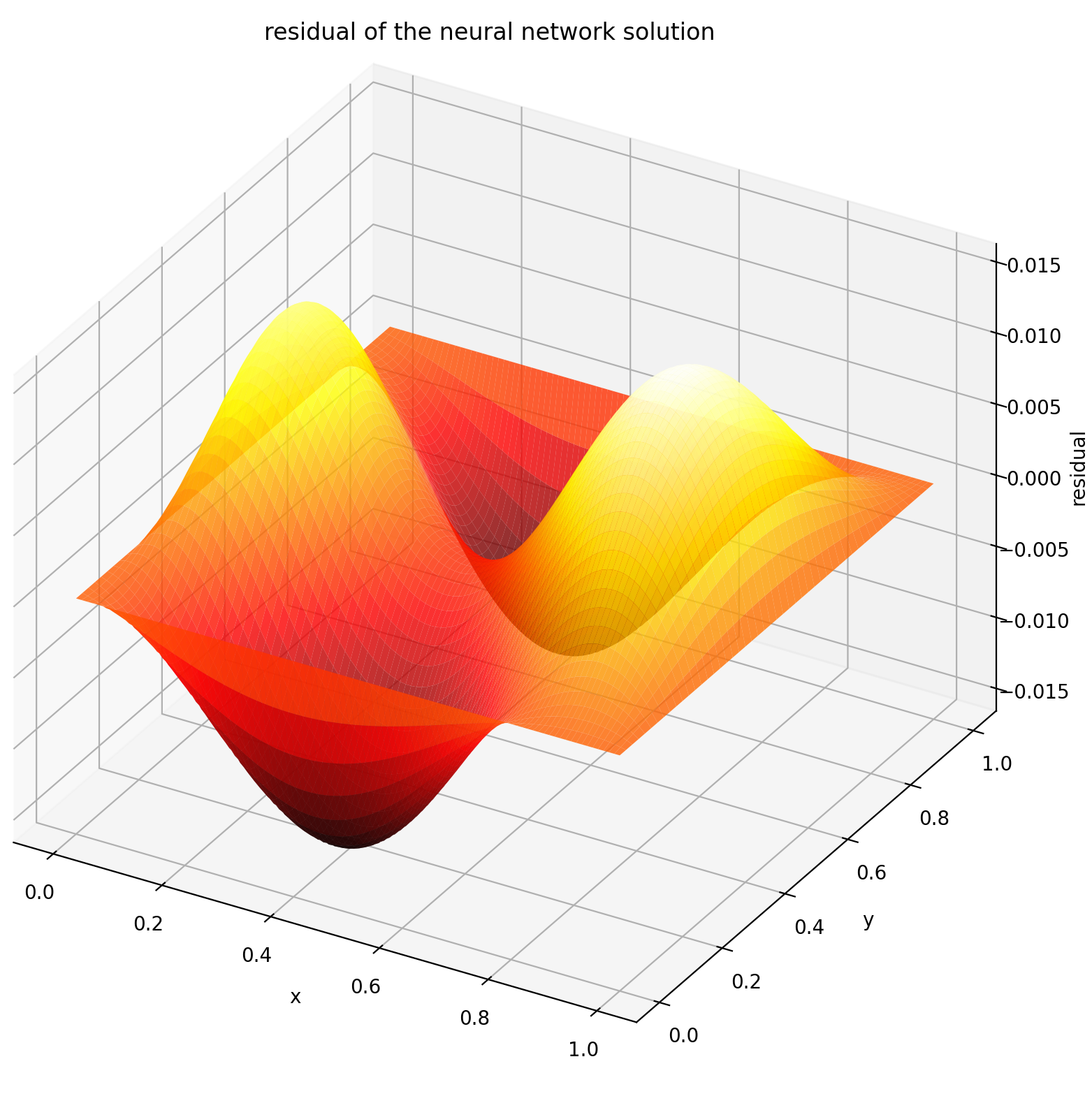 |
使用监视器
监视器是一种用于可视化PDE/ODE解以及训练过程中损失和自定义指标历史的工具。Jupyter Notebook用户需要运行%matplotlib notebook魔法命令。对于Jupyter Lab用户,请尝试%matplotlib widget。
from neurodiffeq.monitors import Monitor1D ... monitor = Monitor1D(t_min=0.0, t_max=12.0, check_every=100) solver.fit(..., callbacks=[monitor.to_callback()])
您应该会看到图形每100个epoch更新一次,以及在最后一个epoch更新,显示两个图表——一个用于在[0,12]区间上的解可视化,另一个用于损失历史(训练和验证)。
自定义网络
为了方便起见,我们实现了FCNN——全连接神经网络,其隐藏单元和激活函数可以自定义。
from neurodiffeq.networks import FCNN # 默认: n_input_units=1, n_output_units=1, hidden_units=[32, 32], activation=torch.nn.Tanh net1 = FCNN(n_input_units=..., n_output_units=..., hidden_units=[..., ..., ...], activation=...) ... nets = [net1, net2, ...]
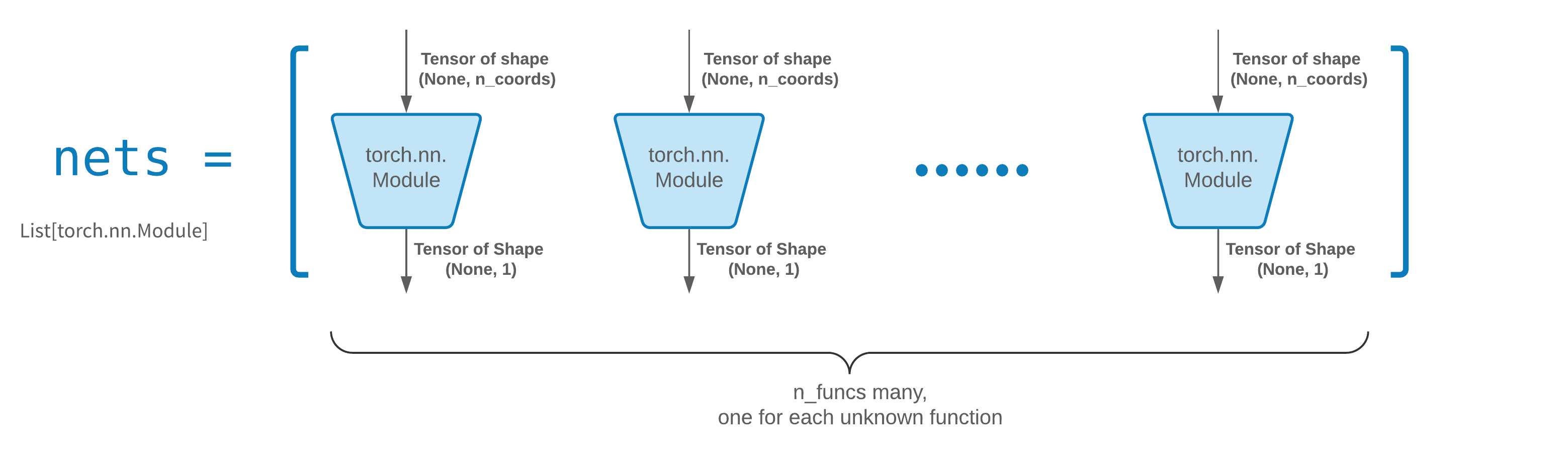
FCNN通常是一个很好的起点。对于高级用户,求解器兼容任何自定义的torch.nn.Module。唯一的约束是:
-
模块接受形状为(None, n_coords)的张量作为输入,并输出形状为(None, 1)的张量。
-
传递给solver = Solver(..., nets=nets)的nets中必须总共有n_funcs个模块。
实际上,neurodiffeq有一个single_net功能,不遵循上述规则,这里不会涉及。
阅读PyTorch教程,了解如何构建自己的网络(即模块)架构。
迁移学习
通过将old_solver.nets(一个torch模块列表)序列化到磁盘,然后加载并传递给新的求解器,可以轻松实现迁移学习:
old_solver.fit(max_epochs=...) # ... 将old_solver.nets保存到磁盘 # ... 从磁盘加载网络,存储在loaded_nets变量中 new_solver = Solver(..., nets=loaded_nets) new_solver.fit(max_epochs=...)
我们目前正在开发用于保存/加载网络和Solver的其他内部变量的包装函数。同时,您可以阅读PyTorch教程,了解如何保存和加载网络。
采样策略
在neurodiffeq中,通过最小化在域内一组点上评估的损失(ODE/PDE残差)来训练网络。这些点每次都会随机重新采样。要控制采样点的数量、分布和边界域,您可以指定自己的训练/验证生成器。
from neurodiffeq.generators import Generator1D # 默认 t_min=0.0, t_max=1.0, method='uniform', noise_std=None g1 = Generator1D(size=..., t_min=..., t_max=..., method=..., noise_std=...) g2 = Generator1D(size=..., t_min=..., t_max=..., method=..., noise_std=...) solver = Solver1D(..., train_generator=g1, valid_generator=g2)
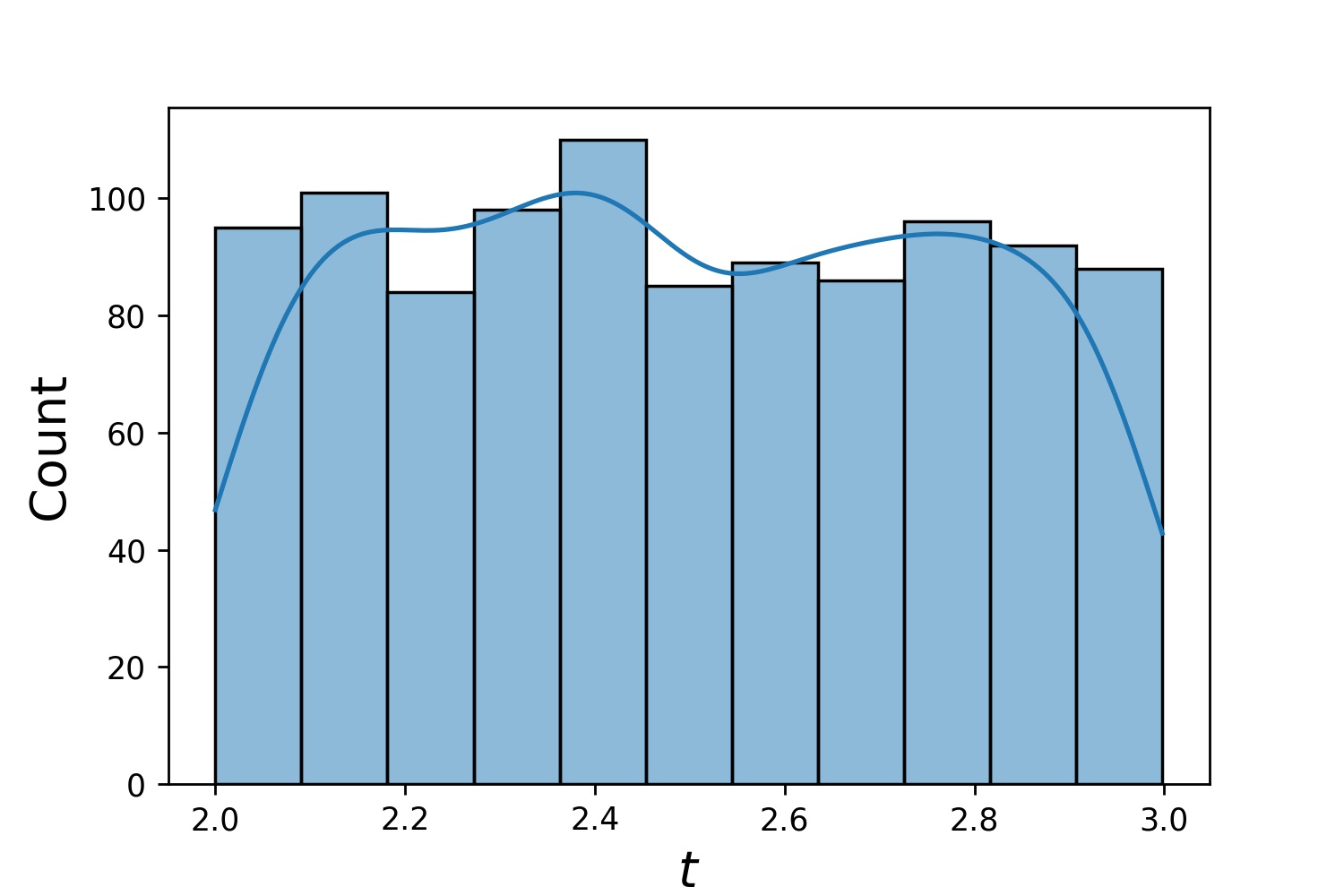
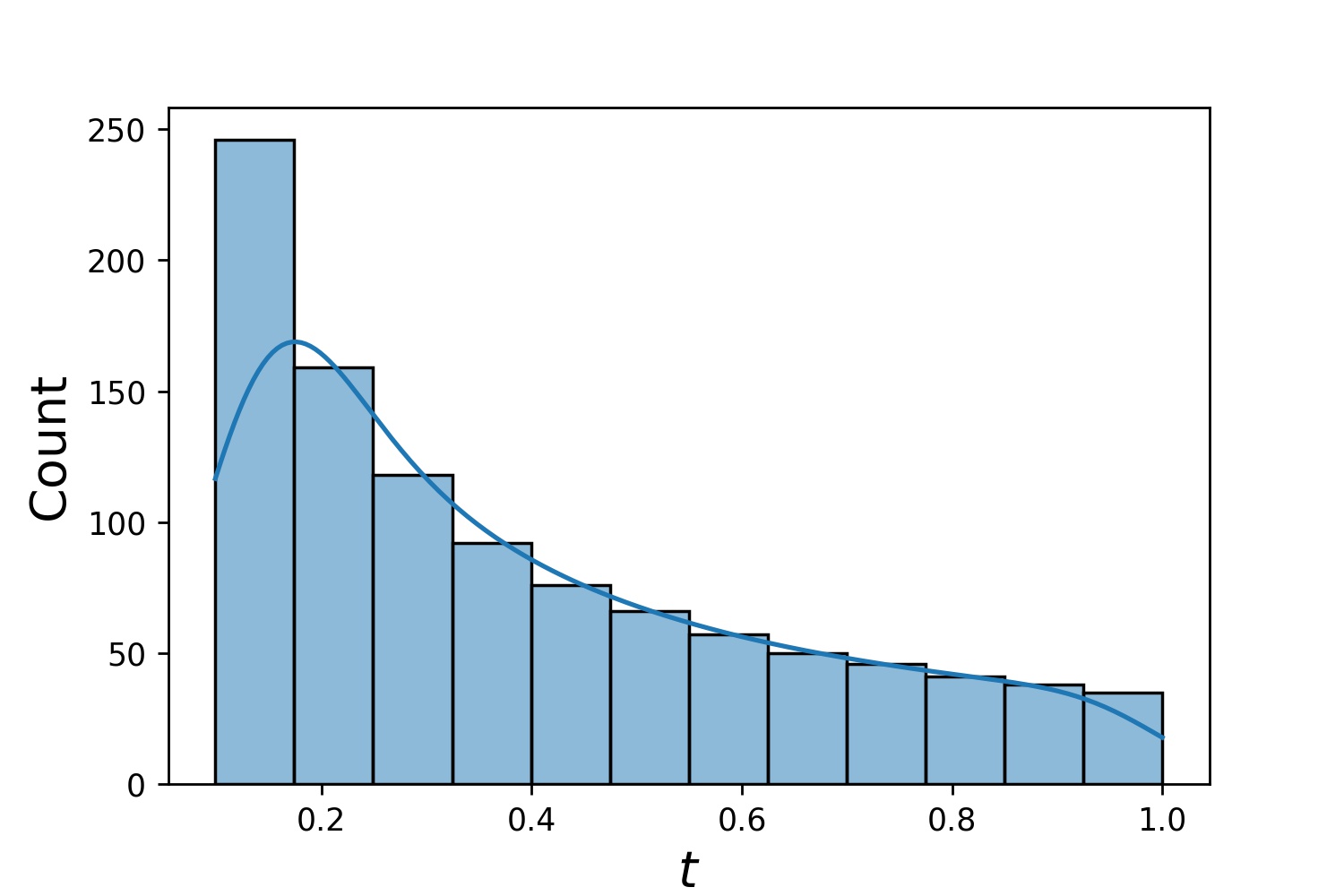
以下是Generator1D的一些样本分布。
Generator1D(8192, 0.0, 1.0, method='uniform') | Generator1D(8192, -1.0, 0.0, method='log-spaced-noisy', noise_std=1e-3) |
|---|---|
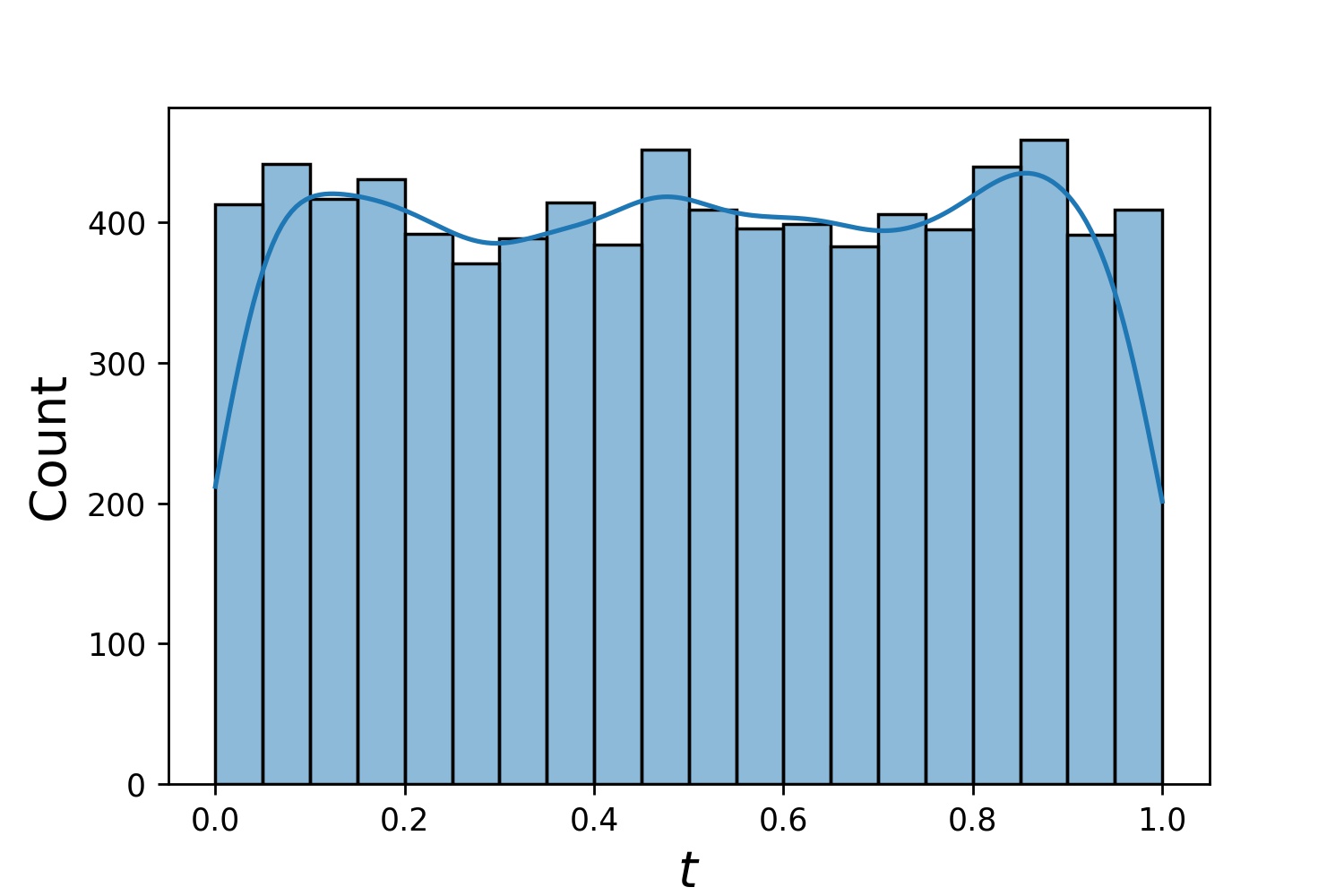 | 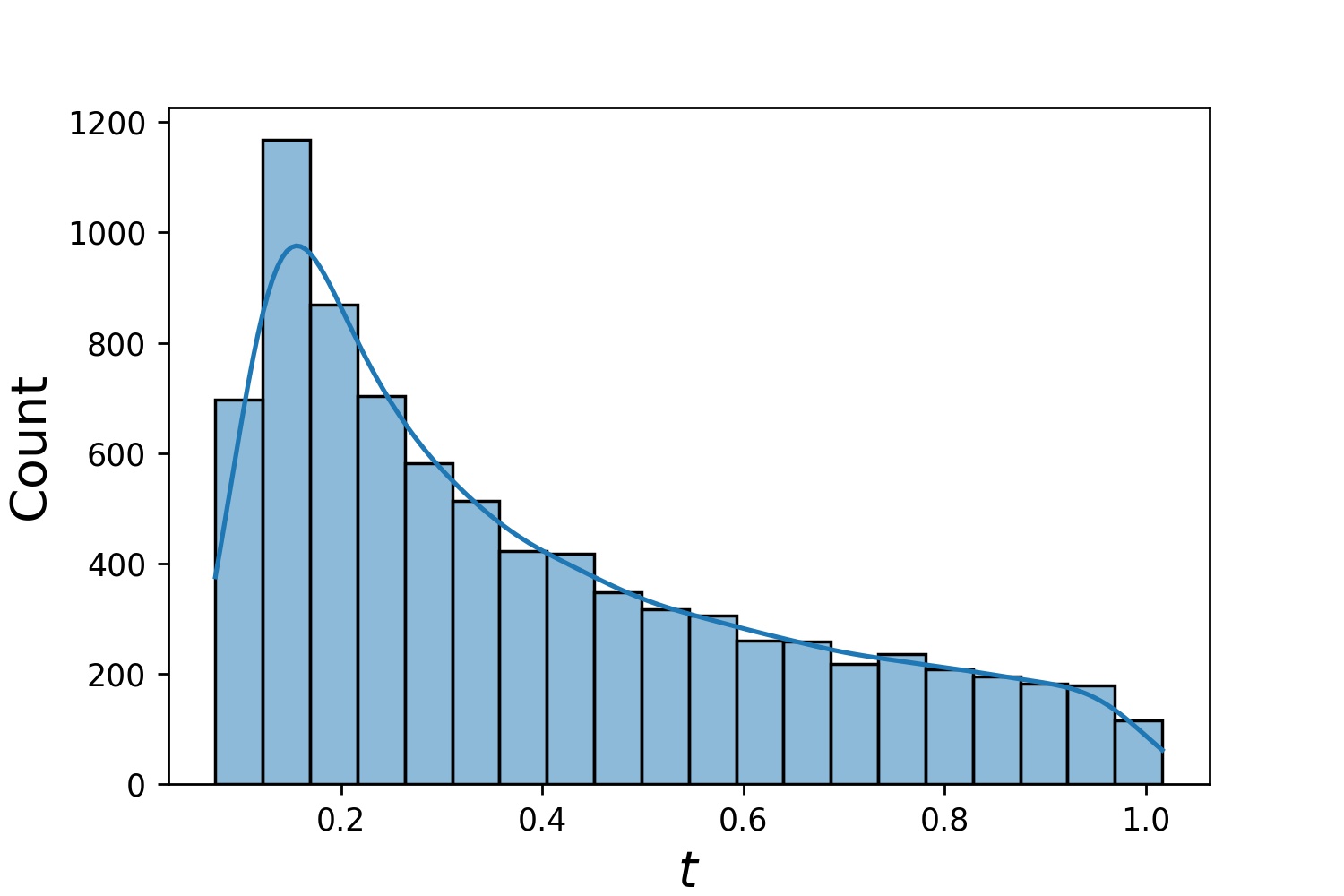 |
注意,当同时指定train_generator和valid_generator时,可以在Solver1D(...)中省略t_min和t_max。事实上,�即使您同时传递t_min、t_max、train_generator、valid_generator,t_min和t_max仍将被忽略。
组合生成器
生成器的另一个很好的特性是可以将它们连接在一起,例如
g1 = Generator2D((16, 16), xy_min=(0, 0), xy_max=(1, 1)) g2 = Generator2D((16, 16), xy_min=(1, 1), xy_max=(2, 2)) g = g1 + g2
在这里,g将是一个输出g1和g2组合样本的生成器
g1 | g2 | g1 + g2 |
|---|---|---|
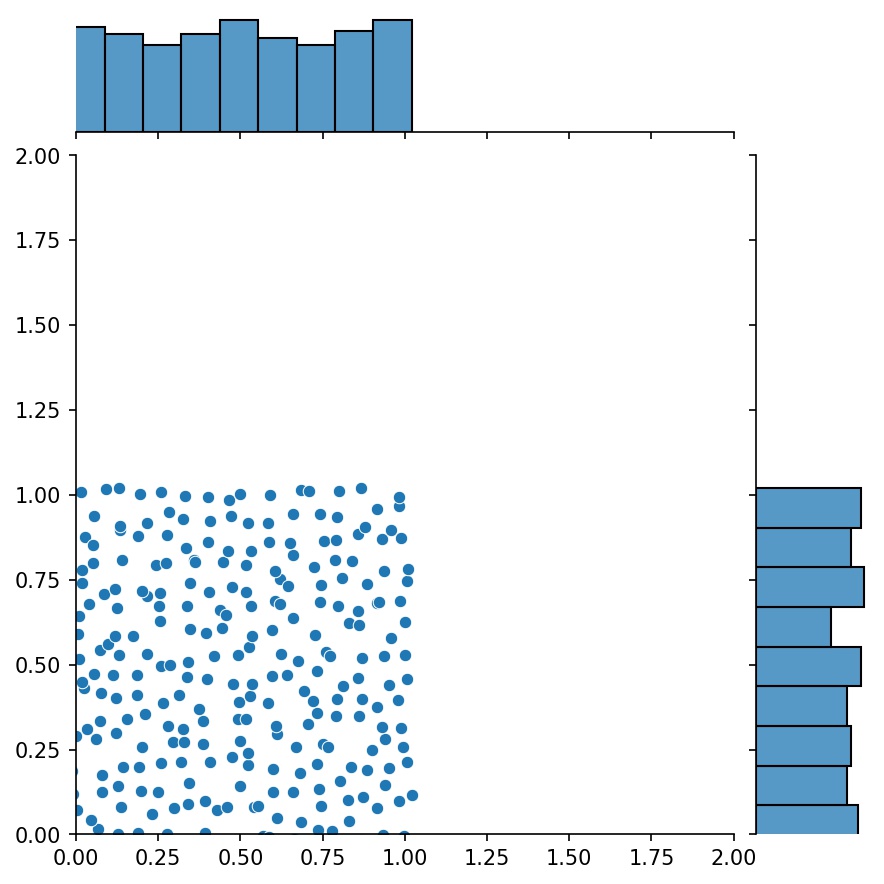 |  | 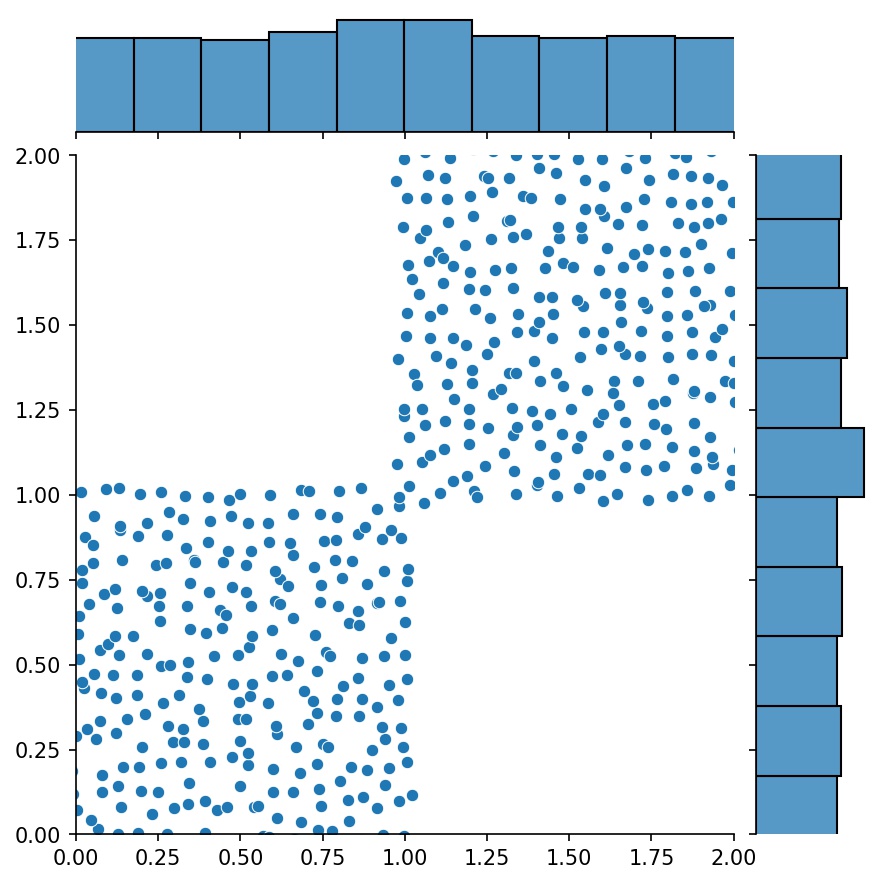 |
采样高维空间
您可以使用Generator2D、Generator3D等来在高维空间中采样点。但还有另一种方法:
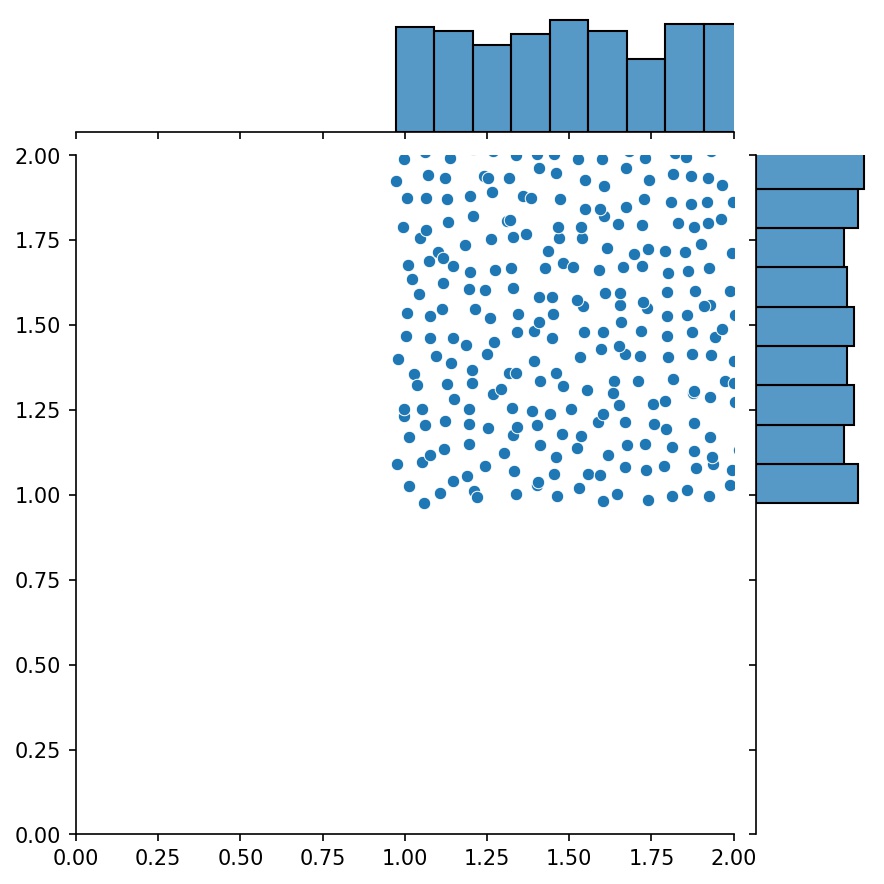
g1 = Generator1D(1024, 2.0, 3.0, method='uniform') g2 = Generator1D(1024, 0.1, 1.0, method='log-spaced-noisy', noise_std=0.001) g = g1 * g2
在这里��,g将是一个生成器,每次产生1024个点,这些点位于二维矩形(2,3) × (0.1,1)中。这些点的x坐标从(2,3)区间内使用uniform策略抽取,y坐标从(0.1,1)区间内使用log-spaced-noisy策略抽取。
g1 | g2 | g1 * g2 |
|---|---|---|
 |  | 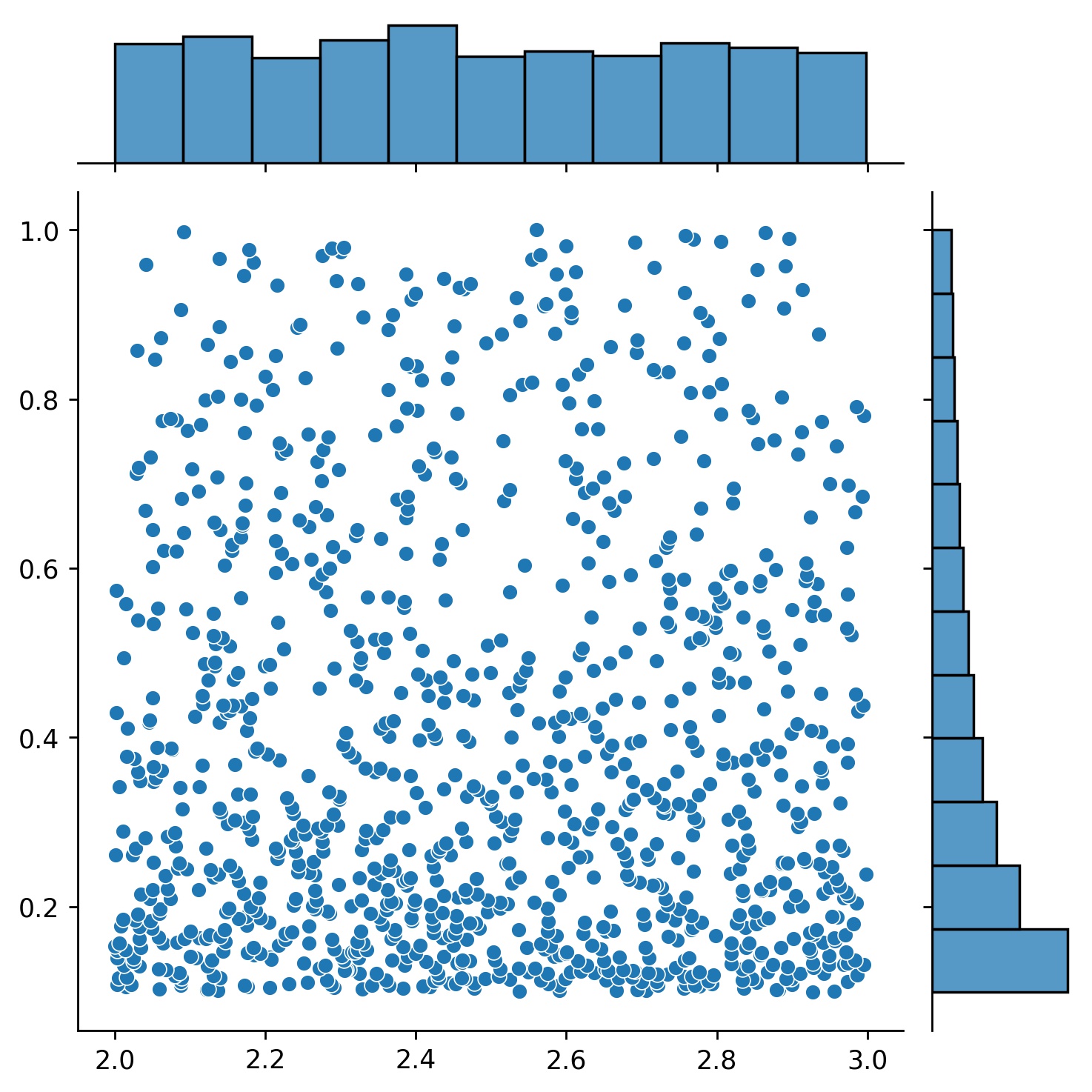 |
解集和反问题
有时,一次性求解一组方程是很有意思的。例如,你可能想要求解形如du/dt + λu = 0的微分方程,其中初始条件为u(0) = U0。你可能想要一次性求解所有λ和U0的情况,通过将它们作为神经网络的输入来处理。
这种应用的一个例子是化学反应,其中反应速率是未知的。不同的反应速率对应不同的解,而只有一个解与观察到的数据点匹配。你可能对首先求解一组解,然后确定最佳反应速率(即方程参数)感兴趣。第二步被称为反问题。
以下是使用neurodiffeq来实现这一目标的示例:
-
假设我们有一个方程
du/dt + λu = 0和初始条件u(0) = U0,其中λ和U0是未知常数。我们还有一组观察值t_obs和u_obs。我们首先导入BundleSolver和BundleIVP,这�对于获得解集是必要的:from neurodiffeq.conditions import BundleIVP from neurodiffeq.solvers import BundleSolver1D import matplotlib.pyplot as plt import numpy as np import torch from neurodiffeq import diff -
我们确定输入
t的范围,以及参数λ和U0的范围。我们还需要决定参数的顺序。即哪个应该是第一个参数,哪个应该是第二个。为了演示的目的,我们选择λ作为第一个参数(索引0),U0作为第二个(索引1)。记住参数的索引非常重要。T_MIN, T_MAX = 0, 1 LAMBDA_MIN, LAMBDA_MAX = 3, 5 # 第一个参数,索引 = 0 U0_MIN, U0_MAX = 0.2, 0.6 # 第二个参数,索引 = 1 -
然后我们像往常一样定义
conditions和solver,只是我们使用BundleIVP和BundleSolver1D而不是IVP和Solver1D。这两者的接口与IVP和Solver1D非常相似。你可以在API参考中了解更多。# 方程参数跟在输入(通常是时间和空间坐标)之后 diff_eq = lambda u, t, lmd: [diff(u, t) + lmd * u] # BundleIVP中的关键字参数必须命名为"u_0"。如果你使用其他名称,如`y0`、`u0`等,将无法工作。 conditions = [ BundleIVP(t_0=0, u_0=None, bundle_param_lookup={'u_0': 1}) # u_0的索引为1 ] solver = BundleSolver1D( ode_system=diff_eq, conditions=conditions, t_min=T_MIN, t_max=T_MAX, theta_min=[LAMBDA_MIN, U0_MIN], # λ的索引为0;u_0的索引为1 theta_max=[LAMBDA_MAX, U0_MAX], # λ的索引为0;u_0的索引为1 eq_param_index=(0,), # λ是唯一的方程参数,其索引为0 n_batches_valid=1, )由于**
λ是方程中的参数**,而**U0是初始条件中的参数**,我们必须在diff_eq中包含λ,在条件中包含U0。如果一个参数同时出现在方程和条件中,它必须同时包含在两个地方。传递给BundleSovler1D的conditions�中的所有元素必须是Bundle*条件,即使它们没有参数。 -
现在,我们可以像往常一样训练它并获得解决方案。
solver.fit(max_epochs=1000) solution = solver.get_solution(best=True)该解决方案需要三个输入 -
t、λ和U0。所有输入必须具有相同的形状。例如,如果你想固定λ=4和U0=0.4,并绘制t ∈ [0,1]范围内的解u,你可以这样做:t = np.linspace(0, 1) lmd = 4 * np.ones_like(t) u0 = 0.4 * np.ones_like(t) u = solution(t, lmd, u0, to_numpy=True) import matplotlib.pyplot as plt plt.plot(t, u) -
一旦你有了打包好的
solution,你可以找到一组参数(λ, U0),使其最接近观测到的数据点(t_i, u_i)。这可以通过简单的梯度下降来实现。在下面的示例中,��我们假设只有三个数据点u(0.2) = 0.273、u(0.5)=0.129和u(0.8) = 0.0609。以下是经典的PyTorch工作流程。# 观测到的数据点 t_obs = torch.tensor([0.2, 0.5, 0.8]).reshape(-1, 1) u_obs = torch.tensor([0.273, 0.129, 0.0609]).reshape(-1, 1) # λ和U0的随机初始化;跟踪它们的梯度 lmd_tensor = torch.rand(1) * (LAMBDA_MAX - LAMBDA_MIN) + LAMBDA_MIN u0_tensor = torch.rand(1) * (U0_MAX - U0_MIN) + U0_MIN adam = torch.optim.Adam([lmd_tensor.requires_grad_(True), u0_tensor.requires_grad_(True)], lr=1e-2) # 运行10000轮梯度下降 for _ in range(10000): output = solution(t_obs, lmd_tensor * torch.ones_like(t_obs), u0_tensor * torch.ones_like(t_obs)) loss = ((output - u_obs) ** 2).mean() loss.backward() adam.step() adam.zero_grad() print(f"λ = {lmd_tensor.item()}, U0={u0_tensor.item()}, loss = {loss.item()}")
常见问题
问:如何使用GPU进行训练?
很简单。在导入neurodiffeq时,库会自动检测你的机器上是否有可用的CUDA。由于该库基于PyTorch,如果找到兼容的GPU设备,它会将默认张量类型设置为torch.cuda.DoubleTensor。
问:如何使用预训练网络?
问:如何更改学习率?
使用标准的PyTorch方法。
-
按照自定义网络中的说明构建你的网络:
nets = [FCNN(), FCN(), ...] -
实例化一个自定义优化器,并将这些网络的所有参数传递给它
parameters = [p for net in nets for p in net.parameters()] # 所有网络的参数列表 MY_LEARNING_RATE = 5e-3 optimizer = torch.optim.Adam(parameters, lr=MY_LEARNING_RATE, ...) -
将你的
nets和optimizer都传递给求解器:solver = Solver1D(..., nets=nets, optimizer=optimizer)
问:我得到了一个不好的解决方案。
与传统的数值方法(FEM、FVM等)不同,基于神经网络��的解决方案需要一些超参数调整。该库提供了最大的灵活性来尝试任何超参数组合。
- 要使用不同的网络架构,你可以传入自定义的
torch.nn.Module。 - 要使用不同的优化器,你可以将自己的优化器传递给
solver = Solver(..., optimizer=my_optim)。 - 要使用不同的采样分布,你可以使用内置生成器或从头编写自己的生成器。
- 要使用不同的采样大小,你可以调整生成器或更改
solver = Solver(..., n_batches_train)。 - 要在训练过程中动态更改超参数,请查看我们的回调功能。
问:有什么经验法则吗?
- 不要使用
ReLU作为激活函数,因为它的二阶导数恒等于0。 - 将你的PDE/ODE重新缩放为无量纲形式,最好使所有内容都在
[0,1]范围内。使用像[0,1000000]这样的域容易失败,因为a) PyTorch初始化模块权重相对较小,以及b) 大多数激活函数(如Sigmoid、Tanh、Swish)在0附近最不线性。 - 如果你的PDE/ODE太复杂,考虑尝试课程学习。开始在较小的域上训练你的网络,然后逐渐扩展直到覆盖整个域。
贡献
欢迎每个人为这个项目做出贡献。
在为这个仓库做出贡献时,我们考虑以下过程:
- 打开一个issue来讨论你计划做出的更改。
- 阅读贡献指南。
- 在fork的仓库上进行更改,如果对接口做了更改,请更新README.md。
- 打开一个拉取请求。
编辑推荐精选


讯飞智文
一键生成PPT和Word,让学习生活更轻松
讯飞智文是一个利用 AI 技术的项目,能够帮助用户生成 PPT 以及各类文档。无论是商业领域的市场分析报告、年度目标制定,还是学生群体的职业生涯规划、实习避坑指南,亦或是活动策划、旅游攻略等内容,它都能提供支持,帮助用户精准表达,轻松呈现各种信息。


讯飞星火
深度推理能力全新升级,全面对标OpenAI o1
科大讯飞的星火大模型,支持语言理解、知识问答和文本创作等多功能,适用于多种文件和业务场景,提升办公和日常生活的效率。讯飞星火是一个提供丰富智能服务的平台,涵盖科技资讯、图像创作、写作辅助、编程解答、科研文献解读等功能,能为不同需求的用户提供便捷高效的帮助,助力用户轻松获取信息、解决问题,满足多样化使用场景。


Spark-TTS
一种基于大语言模型的高效单流解耦语音令牌文本到语音合成模型
Spark-TTS 是一个基于 PyTorch 的开源文本到语音合成项目,由多个知名机构联合参与。该项目提供了高效的 LLM(大语言模型)驱动的语音合成方案,支持语音克隆和语音创建功能,可通过命令行界面(CLI)和 Web UI 两种方式使用。用户可以根据需求调整语音的性别、音高、速度等参数,生成高质量的语音。该项目适用于多种场景,如有声读物制作、智能语音助手开发等。


Trae
字��节跳动发布的AI编程神器IDE
Trae是一种自适应的集成开发环境(IDE),通过自动化和多元协作改变开发流程。利用Trae,团队能够更快速、精确地编写和部署代码,从而提高编程效率和项目交付速度。Trae具备上下文感知和代码自动完成功能,是提升开发效率的理想工具。


咔片PPT
AI助力,做PPT更简单!
咔片是一款轻量化在线演示设计工具,借助 AI 技术,实现从内容生成到智能设计的一站式 PPT 制作服务。支持多种文档格式导入生成 PPT,提供海量模板、智能美化、素材替换等功能,适用于销售、教师、学生等各类人群,能高效制作出高品质 PPT,满足不同场景演示需求。


讯飞绘文
选题、配图、成文,一站式创作,让内容运营更高效
讯飞绘文,一个AI集成平台,支持写作、选题、配图、排版和发布。高效生成适用于各类媒体的定制内容,加速品牌传播,提升内容营销效果。


材料星
专业的AI公文写作平台,公文写作神器
AI 材料��星,专业的 AI 公文写作辅助平台,为体制内工作人员提供高效的公文写作解决方案。拥有海量公文文库、9 大核心 AI 功能,支持 30 + 文稿类型生成,助力快速完成领导讲话、工作总结、述职报告等材料,提升办公效率,是体制打工人的得力写作神器。


openai-agents-python
OpenAI Agents SDK,助力开发者便捷使用 OpenAI 相关功能。
openai-agents-python 是 OpenAI 推出的一款强大 Python SDK,它为开发者提供了与 OpenAI 模型交互的高效工具,支持工具调用、结果处理、追踪等功能,涵盖多种应用场景,如研究助手、财务研究等,能显著提升开发效率,让开发者更轻松地利用 OpenAI 的技术优势。


Hunyuan3D-2
高分辨率纹理 3D 资产生成
Hunyuan3D-2 是腾讯开发的用于 3D 资产生成的强大工具,支持从文本描述、单张图片或多视角图片生成 3D 模型,具备快速形状生成能力,可生成带纹理的高质量 3D 模型,适用于多个领域,为 3D 创作提供了高效解决方案。


3FS
一个具备存储、管理和客户端操作等多种功能的分布式文件系统相关项目。
3FS 是一个功能强大的分布式文件系统项目,涵盖了存储引擎、元数据管理、客户端工具等多个模块。它支持多种文件操作,如创建文件和目录、设置布局等,同时具备高效的事件循环、节点选择和协程池管理等特性。适用于需要大规模数据存储和管理的场景,能够提高系统的性能和可靠性,是分布式存储领域的优质解决方案。
推荐工具精选




AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号