
Barkour Robot:突破四足机器人的极限
在机器人技术不断发展的今天,四足机器人因其出色的运动能力和环境适应性而备受关注。Google DeepMind公司最近发布的Barkour Robot项目,无疑为这一领域带来了新的突破。Barkour Robot是一系列敏捷四足机器人,旨在支持各种前沿研究项目,并为四足机器人的发展提供新的基准。
项目概述
Barkour Robot项目由Google DeepMind开发,是一个完全开源的四足机器人平台。该项目不仅包含了机器人的硬件设计资料,还提供了核心软件和详细的文档。这使得研究人员和爱好者能够深入了解四足机器人的各个方面,从机械设计到控制算法。

硬件设计
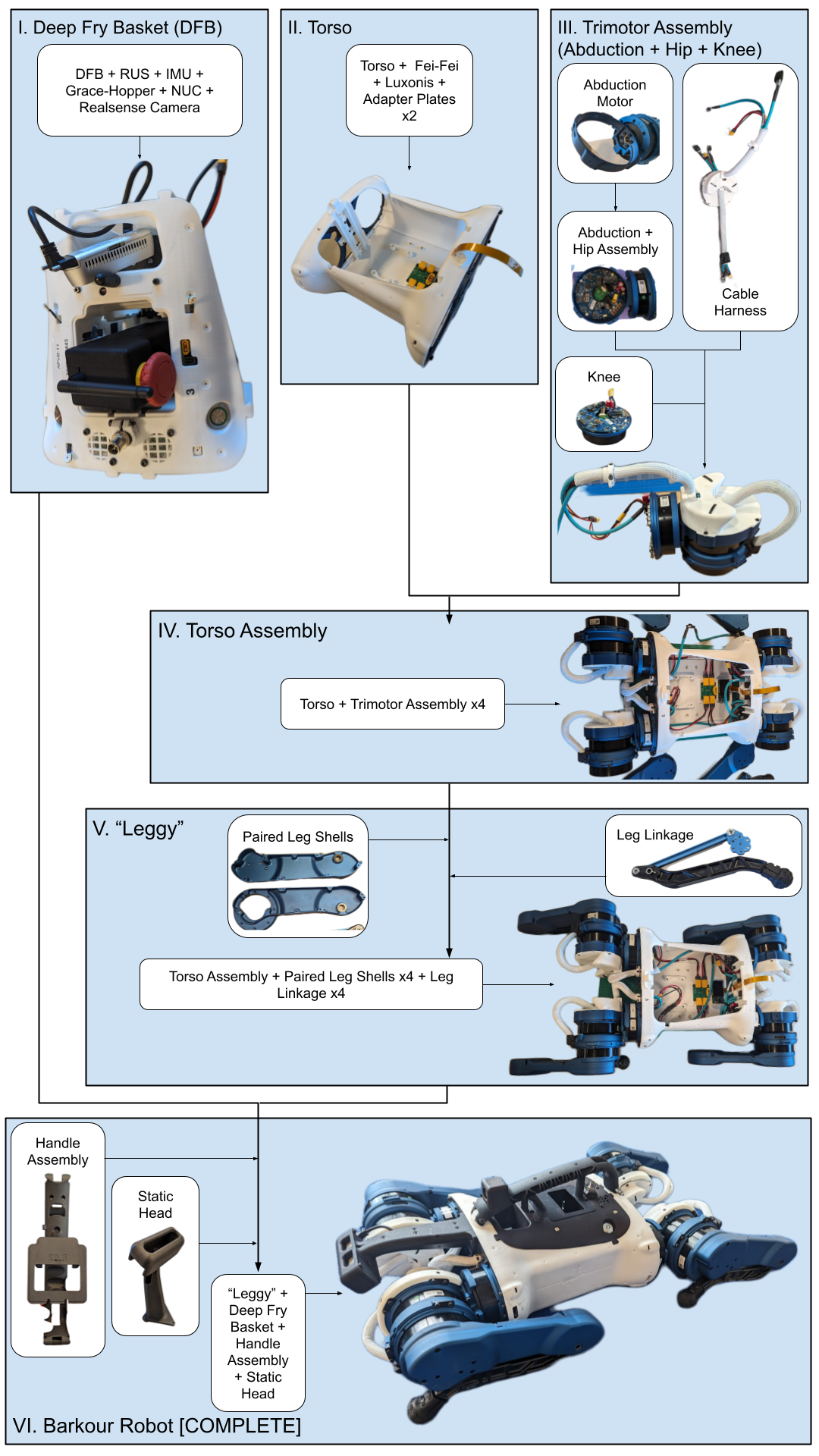
Barkour Robot的硬件设计非常先进。项目提供了两个版本的机器人设计:一个带固定头部,另一个带可动头部和"嘴部"(抓取器)。这种设计使得机器人不仅能够进行基础的运动,还能执行一些简单的操作任务。
机器人的机械设计文件(CAD模型)可以在线上查看和下载,这为研究人员提供了深入研究机器人结构的机会。同时,项目还提供了电子设计文件,包括定制的电机驱动器设计,这些驱动器通过EtherCAT与机载计算机通信。
软件与仿真
Barkour Robot项目不仅提供了硬件设计,还包含了丰富的软件资源。机器人使用基于开源项目Pigweed的自定义固件。项目文档中提供了详细的固件指南,以及通过EtherCAT控制执行器的示例代码。
在仿真方面,Barkour Robot支持MuJoCo仿真环境。研究人员可以使用这些仿真模型在虚拟环境中测试和优化控制算法。特别值得一提的是,项目支持MJX进行快速训练,这使得研究人员能够在几分钟内在GPU或TPU上训练出控制策略。
组装指南
为了方便研究人员和爱好者从零开始构建Barkour机器人,项目提供了全面的组装指南。这些指南涵盖了从机器人整体组装到具体部件(如执行器、髋部外壳、腿部连杆等)的安装说明。此外,还提供了无线急停(STO)装置的组装指南和IMU配置说明。
项目还提供了详细的物料清单(BOM),这对于想要复制或改进Barkour Robot的研究团队来说是非常有价值的资源。
硬件能力展示
Barkour Robot展现了令人印象深刻的运动能力和灵活性。项目文档中包含了多个GIF动画,展示了机器人的各种动作,包括:
- 双腿跳跃和四腿跳跃
- 跳跃转身
- 推箱盖和推咖啡杯等精细操作
- 抵抗外力推动和倾斜补偿
- 捡起拖鞋和衬衫等物品
- 爬箱子等障碍物
这些能力展示了Barkour Robot在运动控制和环境交互方面的优秀表现,为未来的应用开发提供了广阔的想象空间。
研究价值与应用前景
Barkour Robot项目的开源性质为四足机器人研究领域带来了巨大价值。通过提供完整的硬件设计、软件和文档,该项目降低了四足机器人研究的门槛,使更多研究者能够参与到这一领域中来。
在应用方面,Barkour Robot展现的各种能力暗示了其广泛的潜在用途:
- 搜救任务:其出色的运动能力使其能够在复杂地形中快速移动,potentially用于灾难现场的搜救工作。
- 工业检测:配备适当的传感器,Barkour Robot可以用于工厂或其他工业环境中的巡检任务。
- 家庭辅助:其抓取和操作能力显示了在家庭环境中assist人类的潜力,如捡拾物品或简单的家务。
- 科研平台:作为一个开放的研究平台,Barkour Robot为机器人学习、控制理论、人工智能等领域的研究提供了理想的测试平台。
- 教育工具:其开源特性使其成为理想的教育工具,可用于机器人学、控制工程等相关课程的实践教学。
未来展望
Barkour Robot项目的发布标志着四足机器人研究进入了一个新的阶段。通过开源硬件和软件,Google DeepMind不仅展示了自身的技术实力,也为整个领域的发展注入了新的动力。
未来,我们可以期待看到:
- 社区贡献:开源社区可能会为Barkour Robot开发新的功能和改进,进一步增强其能力。
- 衍生项目:基于Barkour Robot的设计,可能会出现针对特定应用优化的衍生机器人。
- 算法创新:随着更多研究者使用这个平台,我们可能会看到在控制算法、机器学习等方面的创新。
- 商业应用:尽管项目以研究为导向,但其展示的能力可能会激发新的商业应用ideas。
- 跨领域合作:Barkour Robot可能会促进机器人学与其他领域(如材料科学、生物学等)的交叉研究。
结语
Barkour Robot项目展现了Google DeepMind在四足机器人领域的雄心和技术实力。通过开源这一先进的机器人平台,他们不仅推动了技术的发展,也为整个研究社区做出了重要贡献。随着更多研究者和开发者参与到这个项目中来,我们有理由期待看到更多令人兴奋的创新和突破。Barkour Robot无疑将成为推动四足机器人技术向前发展的重要力量,为未来的智能机器人应用铺平道路。









