
什么是动态规划?
动态规划(Dynamic Programming,简称DP)是计算机科学和数学优化中的一种重要方法。它通过将复杂问题分解成更简单的子问题,并存储子问题的解以避免重复计算,从而提高算法的效率。理查德·贝尔曼(Richard Bellman)在1950年代首次提出了这一概念,此后动态规划在各个领域得到了广泛应用。
动态规划的核心思想是:
- 将原问题分解为若干个子问题
- 求解子问题并存储结果
- 利用子问题的解构建原问题的解
通过这种方式,动态规划避免了重复计算,大大提高了算法效率。
动态规划的工作原理
动态规划的工作原理可以概括为以下几个步骤:
- 定义子问题
- 写出子问题的递推关系
- 以自底向上或自顶向下的方式求解问题
其中,最关键的是找出子问题间的递推关系。一旦建立了正确的递推关系,问题就已经解决了一半。
动态规划通常有两种实现方式:
- 自顶向下的备忘录法(Top-down with Memoization)
- 自底向上的表格法(Bottom-up with Tabulation)
备忘录法从原问题开始,递归地解决子问题,并将子问题的解存储在备忘录中。表格法则从最小的子问题开始,逐步构建更大问题的解,直到解决原问题。
动态规划的应用场景
动态规划适用于具有以下特征的问题:
- 最优子结构:问题的最优解包含子问题的最优解
- 重叠子问题:子问题会重复出现
一些典型的动态规划应用包括:
- 斐波那契数列
- 最长公共子序列
- 背包问题
- 最短路径问题
- 矩阵链乘法
让我们以斐波那契数列为例,来看看动态规划是如何优化算法的。
斐波那契数列的动态规划实现
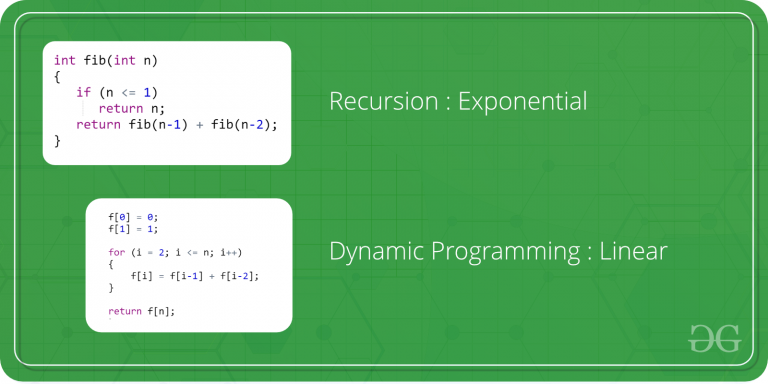
斐波那契数列是一个经典的动态规划问题。传统的递归实现效率较低:
def fib(n):
if n <= 1:
return n
return fib(n-1) + fib(n-2)
这种方法的时间复杂度是O(2^n),对于大的n值计算非常慢。
使用动态规划,我们可以将时间复杂度降低到O(n):
def fib_dp(n):
if n <= 1:
return n
dp = [0] * (n+1)
dp[1] = 1
for i in range(2, n+1):
dp[i] = dp[i-1] + dp[i-2]
return dp[n]
这个实现使用了自底向上的表格法,避免了重复计算,大大提高了效率。
动态规划与其他算法策略的比较
动态规划与分治法、贪心算法等其他算法策略有一些相似之处,但也有明显区别:
-
分治法:将问题分解为互不重叠的子问题,分别解决后合并。而动态规划处理的子问题往往是重叠的。
-
贪心算法:每一步都做出当前最优选择,但不能保证全局最优。动态规划则通过考虑所有可能的解来找到全局最优解。
-
暴力搜索:尝试所有可能的解,时间复杂度通常很高。动态规划通过存储中间结果避免重复计算,提高效率。

动态规划的优缺点
优点:
- 可以显著提高算法效率,特别是对于具有重叠子问题的问题
- 适用于求解最优化问题
- 为复杂问题提供了一种系统的解决方法
缺点:
- 需要额外的存储空间来保存中间结果
- 有时难以找到正确的状态转移方程
- 不是所有问题都适合用动态规划解决
结语
动态规划是一种强大的算法设计技术,在计算机科学和数学优化中有广泛应用。通过将复杂问题分解为更简单的子问题,并重用这些子问题的解,动态规划可以大大提高算法的效率。虽然掌握动态规划需要一定的练习和直觉,但一旦掌握,它将成为解决复杂问题的有力工具。
对于程序员和算法工程师来说,深入理解动态规划不仅能帮助我们设计更高效的算法,还能培养我们解决问题的思维方式。在实际工作中,我们可能会遇到各种各样的优化问题,而动态规划的思想将帮助我们以更系统、更高效的方式来解决这些问题。
随着人工智能和机器学习的不断发展,动态规划在这些领域也找到了新的应用。例如,在强化学习中,动态规划是许多算法的基础。因此,掌握动态规划不仅对传统的算法设计有帮助,对于想要在AI和ML领域发展的程序员来说也是非常重要的。
总之,动态规划是一个值得每个程序员深入学习和掌握的重要算法技术。通过不断的练习和应用,我们可以培养出解决复杂问题的直觉,提高编程效率,为成为更优秀的程序员打下坚实的基础。











