
K-Planes:探索空间、时间和外观的新型神经辐射场表示
在计算机视觉和图形学领域,神经辐射场(Neural Radiance Fields,NeRF)技术的出现为三维场景重建和新视角合成带来了革命性的进展。然而,传统NeRF方法在处理动态场景或具有可变外观的场景时仍面临诸多挑战。为了解决这些问题,研究人员提出了一种新的神经辐射场表示方法——K-Planes,它能够在空间、时间和外观等多个维度上对场景进行统一的建模。
K-Planes的核心思想
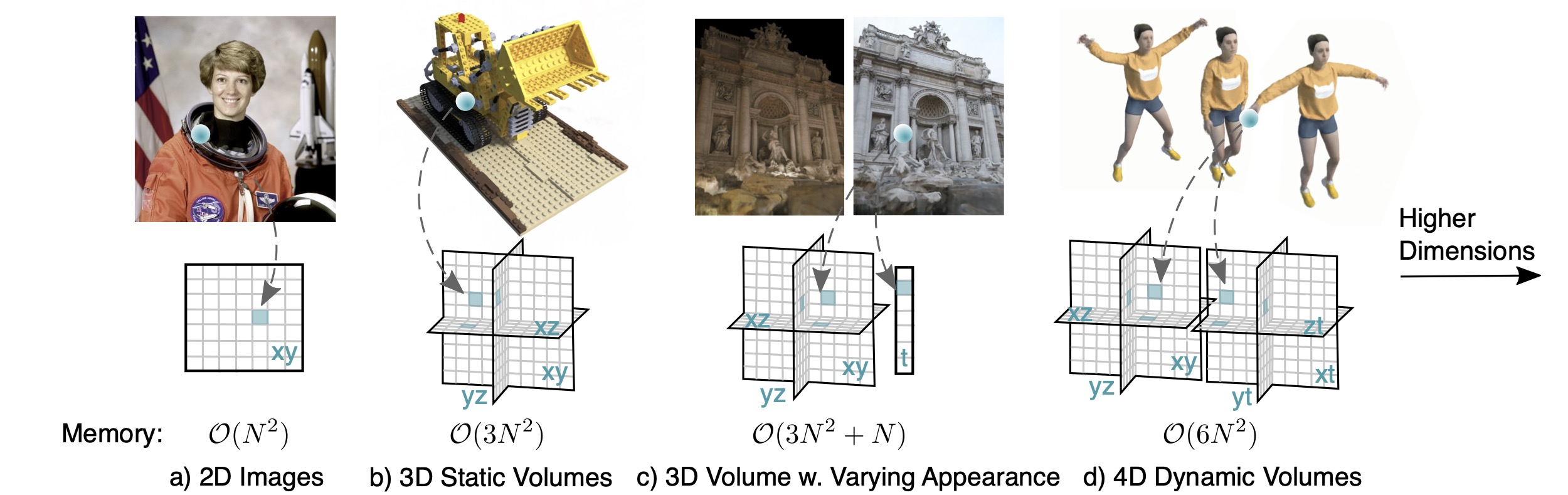
K-Planes的核心思想是采用平面分解的方式来表示高维空间中的辐射场。具体来说,对于一个d维的场景,K-Planes使用d选2个平面来表示。这种表示方法有以下几个显著优势:
-
可扩展性强:从静态3D场景(d=3)到动态4D场景(d=4),K-Planes都能够无缝适应。
-
内存效率高:相比于完整的4D网格表示,K-Planes能够实现1000倍的压缩率。
-
优化速度快:基于PyTorch的纯实现能够实现快速的优化过程。
-
易于添加先验:平面分解的结构使得添加维度特定的先验变得简单,如时间平滑性和多分辨率空间结构等。
-
自然分解静态和动态成分:K-Planes能够自然地将场景分解为静态和动态部分。
K-Planes的技术细节
K-Planes的具体实现包括以下几个关键步骤:
-
平面投影:对于一个4D点(x,y,z,t),首先将其投影到6个平面上(3个空间平面和3个时空平面)。
-
多尺度双线性插值:在每个平面上进行多尺度的双线性插值。
-
特征融合:将插值得到的特征进行乘法和连接操作。
-
解码:使用小型MLP或显式线性解码器将特征解码为颜色和密度值。
-
体积渲染:使用标准的体积渲染公式预测最终的颜色。
-
优化:通过最小化重建损失并添加简单的空间和时间正则化来优化模型。
K-Planes在各类场景中的应用
K-Planes展现出了强大的通用性,能够在各种类型的场景中实现高质量的重建和新视角合成:
- 静态3D场景
K-Planes在合成NeRF数据集和LLFF数据集等经典的静态3D场景上取得了与现有方法相当甚至更优的重建效果。
- 动态4D场景
对于DNeRF数据集中的动态单目视频,K-Planes能够准确地重建物体的运动轨迹并生成高质量的新视角画面。
- 动态多视角4D场景
在真实的多视角动态场景中,K-Planes同样表现出色,能够精确捕捉复杂的运动和变形。
- 可变外观3D场景
对于具有变化光照或天气条件的Phototourism数据集,K-Planes能够很好地建模外观的变化,实现逼真的光照插值效果。
K-Planes的优势与创新
相比于现有的神经辐射场方法,K-Planes具有以下几个显著的优势:
-
统一的表示:K-Planes提供了一种统一的框架,能够同时处理静态、动态和可变外观的场景,大大增强了模型的通用性。
-
显式表示:与许多基于隐式MLP的方法不同,K-Planes采用了显式的平面表示,使得模型更加可解释和可控。
-
高效的内存使用:通过平面分解,K-Planes大大降低了内存需求,特别是在处理高维场景时优势明显。
-
快速的优化:K-Planes的结构设计使得它能够在纯PyTorch实现下实现快速的优化。
-
灵活的先验整合:平面结构使得添加各种先验知识变得简单直接,有利于提高重建质量。
K-Planes的应用前景
K-Planes的出现为神经辐射场技术开辟了新的研究方向,其潜在的应用场景包括但不限于:
-
虚拟现实与增强现实:K-Planes能够为VR/AR应用提供更加逼真和动态的场景重建。
-
电影特效:在影视制作中,K-Planes可用于创建复杂的动态场景和视觉效果。
-
自动驾驶:K-Planes有潜力为自动驾驶系统提供更精确的动态环境理解。
-
文化遗产保护:通过K-Planes,可以对历史遗迹进行高精度的数字化保存,并模拟不同时间和光照条件下的外观。
-
机器人视觉:K-Planes可以帮助机器人更好地理解和导航在动态环境中。
结语
K-Planes作为一种新型的神经辐射场表示方法,展现出了强大的潜力。它不仅在性能上达到了当前最先进水平,还提供了一个统一和灵活的框架来处理各种复杂的三维重建任务。随着进一步的研究和优化,K-Planes有望在计算机视觉、图形学和相关领域带来更多突破性的应用。
研究人员和开发者可以通过官方GitHub仓库获取K-Planes的代码实现,并参与到这一激动人心的研究方向中来。未来,我们期待看到K-Planes在更多领域中的创新应用,以及基于K-Planes的进一步技术突破。









