
引言:突破3D渲染的内存瓶颈
在计算机图形学和计算机视觉的交叉领域,3D场景的高质量渲染一直是一个具有挑战性的任务。随着神经辐射场(NeRF)等技术的出现,我们能够以前所未有的质量重建和渲染复杂的3D场景。然而,这些方法通常需要大量的GPU内存,严重限制了它们在高分辨率或大规模场景中的应用。
面对这一挑战,Facebook Research团队开发了Lightplane项目,这是一个突破性的解决方案,旨在彻底改变神经3D场景渲染的方式。Lightplane通过其高度优化的设计,不仅大幅降低了内存消耗,还保持了与现有方法相当的渲染速度,为3D视觉技术的发展开辟了新的可能性。
Lightplane的核心组件
Lightplane项目由两个主要组件构成,它们共同工作以实现高效的3D场景渲染和特征处理:
-
Lightplane渲染器(Renderer):这是一个差分辐射场渲染器,能够根据给定的相机视点和场景网格结构(如三平面或体素网格)渲染相应的图像。
-
Lightplane散射器(Splatter):作为渲染器的对偶组件,散射器负责将图像特征提升或投影到3D网格结构中。
这两个组件都是作为高度优化的Triton GPU内核实现的,这使得它们能够在保持高性能的同时大幅减少内存使用。
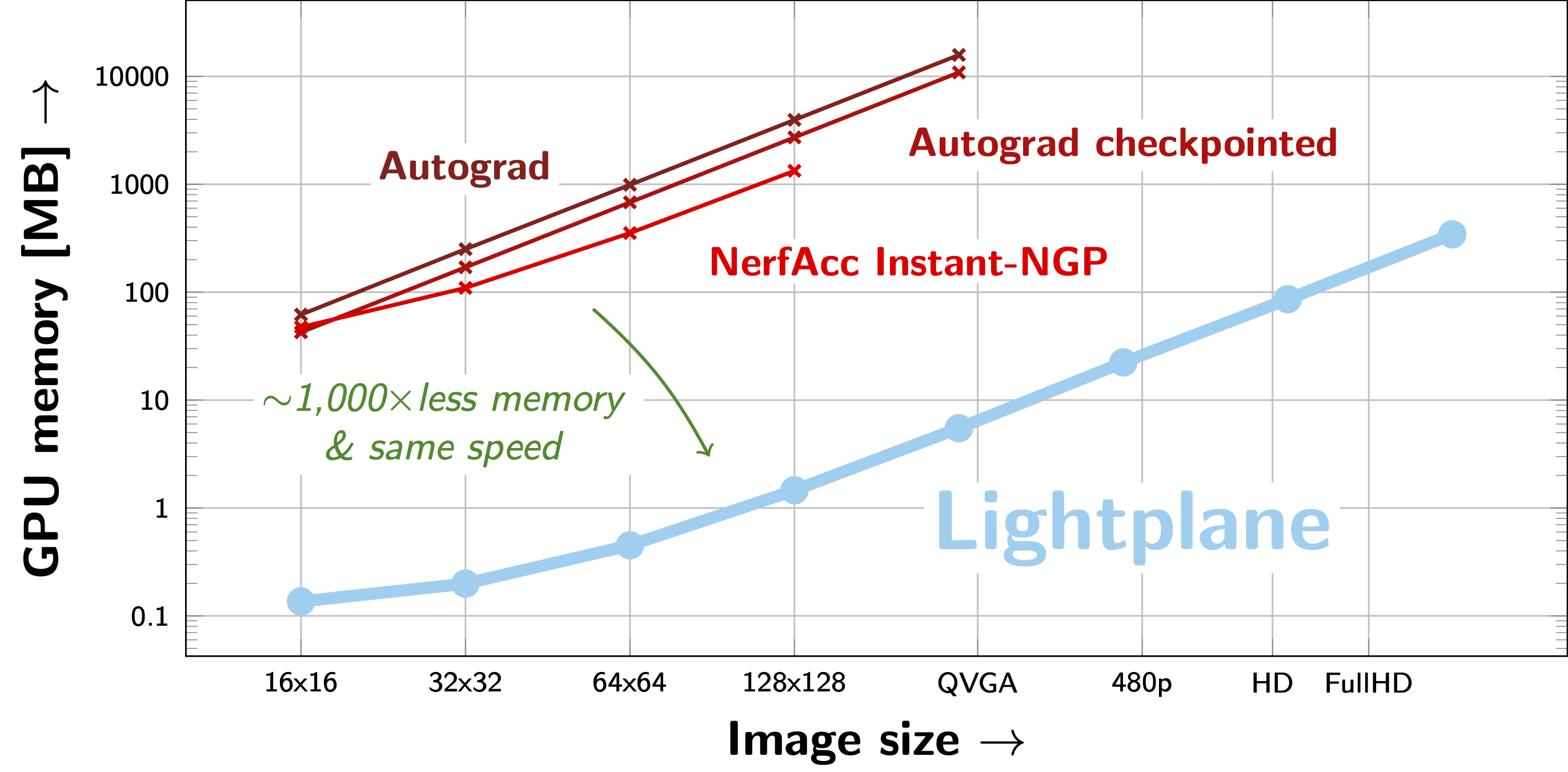
突破性的内存效率
Lightplane最引人注目的特性是其惊人的内存效率。在渲染256x256分辨率的图像时,Lightplane仅使用10 MB的GPU内存,而传统的PyTorch实现则需要高达10 GB。这种数量级的内存节省使得Lightplane能够处理更高分辨率的图像和更复杂的场景,而不会受到GPU内存限制的困扰。
高度可扩展性
得益于其卓越的内存效率,Lightplane显著提升了3D重建和生成模型的可扩展性。它允许研究人员和开发者:
- 处理数百个视图的特征提升和投影
- 渲染高分辨率的多视图图像
- 在有限的GPU资源下处理更大规模的场景
这种可扩展性为3D视觉技术在实际应用中的部署开辟了新的可能性,从虚拟现实和增强现实到自动驾驶和机器人视觉,Lightplane都有潜力带来重大突破。
灵活性和易用性
Lightplane不仅高效,还具有很强的灵活性和易用性:
-
通用设计:虽然当前主要支持体素网格和三平面(TriPlane)结构,但Lightplane的设计足够通用,可以轻松扩展到其他3D网格结构,如哈希网格(hash grid)和六平面(HexPlane)等。
-
易于集成:Lightplane的渲染器和散射器都被封装为
torch.nn.Module,可以轻松地作为插件集成到现有的神经3D场景处理流程中。 -
配置灵活:用户可以根据具体需求调整采样点数量、颜色通道数、网格通道数等参数,以适应不同的应用场景。
安装和使用
安装Lightplane非常简单,主要步骤包括:
- 安装PyTorch
- 安装COG、Triton和plotly等依赖库
- 安装Lightplane包
pip install cogapp
pip install triton
pip install plotly
pip install lightplane
使用Lightplane渲染器的基本流程如下:
from lightplane import LightplaneRenderer, Rays
# 初始化渲染器
renderer = LightplaneRenderer(
num_samples=128,
color_chn=3,
grid_chn=3,
mlp_hidden_chn=32,
mlp_n_layers_opacity=2,
mlp_n_layers_trunk=2,
mlp_n_layers_color=2,
ray_embedding_num_harmonics=3,
).to(device)
# 创建渲染射线
rays = Rays(
directions=torch.randn(num_rays, 3) * 0.1,
origins=torch.randn(num_rays, 3),
grid_idx=torch.zeros(num_rays, dtype=torch.int32),
near=torch.full(num_rays, 0.1),
far=torch.full(num_rays, 3.0),
)
# 创建三平面特征网格
feature_grid = [
torch.randn(batch_size, 1, H, W, channels, device=device),
torch.randn(batch_size, D, 1, W, channels, device=device),
torch.randn(batch_size, D, H, 1, channels, device=device),
]
# 执行渲染
rendered_ray_length, rendered_alpha, rendered_features = renderer(
rays=rays.to(device), feature_grid=feature_grid
)
未来发展方向
Lightplane项目团队计划在未来实现两个主要的新功能:
- 支持哈希网格(hash grids)
- 支持时间网格,如六平面(HexPlane)
这些扩展将进一步增强Lightplane的适用性和性能,使其能够应对更多样化的3D场景渲染和处理任务。
结论
Lightplane代表了神经3D场景渲染技术的一个重要突破。通过其创新的内存优化方法和高度可扩展的设计,Lightplane为研究人员和开发者提供了一个强大的工具,使他们能够在有限的计算资源下处理更复杂、更大规模的3D场景。
随着虚拟现实、增强现实和元宇宙概念的不断发展,高效的3D渲染技术变得越来越重要。Lightplane的出现无疑为这些领域的进步提供了强有力的技术支持。我们可以期待在不久的将来,基于Lightplane的应用将在游戏、影视制作、建筑设计等多个领域展现出令人瞩目的成果。
对于有兴趣深入了解或使用Lightplane的读者,可以访问Lightplane的GitHub仓库获取更多信息,包括详细的文档、示例代码和最新的更新。Lightplane采用BSD 3.0开源许可证,欢迎社区贡献和使用。
让我们共同期待Lightplane为3D视觉技术带来的更多可能性,推动计算机图形学和计算机视觉领域的进一步发展。🚀🌟









