
MonoGS: 开创高斯飞溅SLAM新纪元
在计算机视觉和机器人技术飞速发展的今天,一项名为MonoGS的创新项目正在引起学术界和工业界的广泛关注。这个由Hidenobu Matsuki和Riku Murai等研究人员开发的项目,不仅在CVPR 2024会议上获得了亮点论文的殊荣,还斩获了最佳演示奖,展现了其在实际应用中的巨大潜力。
突破性的高斯飞溅SLAM技术
MonoGS项目的核心在于其独特的技术路线——基于3D高斯飞溅的单目SLAM系统。这是首个完全依托于3D高斯飞溅技术的单目SLAM系统,不仅支持单目相机输入,还可兼容立体相机和RGB-D相机的数据。这种多模态兼容性使得MonoGS在各种场景下都能发挥出色的性能。
高斯飞溅技术的应用为SLAM系统带来了显著的优势。相比传统的点云或体素表示方法,高斯飞溅能够更加精确和高效地描述3D环境。这不仅提高了系统的定位和建图精度,还大大改善了重建场景的视觉质量。
系统架构与功能特点
MonoGS系统的架构设计非常巧妙,主要包含前端跟踪和后端优化两大模块。前端负责实时的相机姿态估计和地图点跟踪,而后端则通过Bundle Adjustment等技术对整体地图结构进行优化。这种设计既保证了系统的实时性能,又能够不断提升地图的全局一致性。
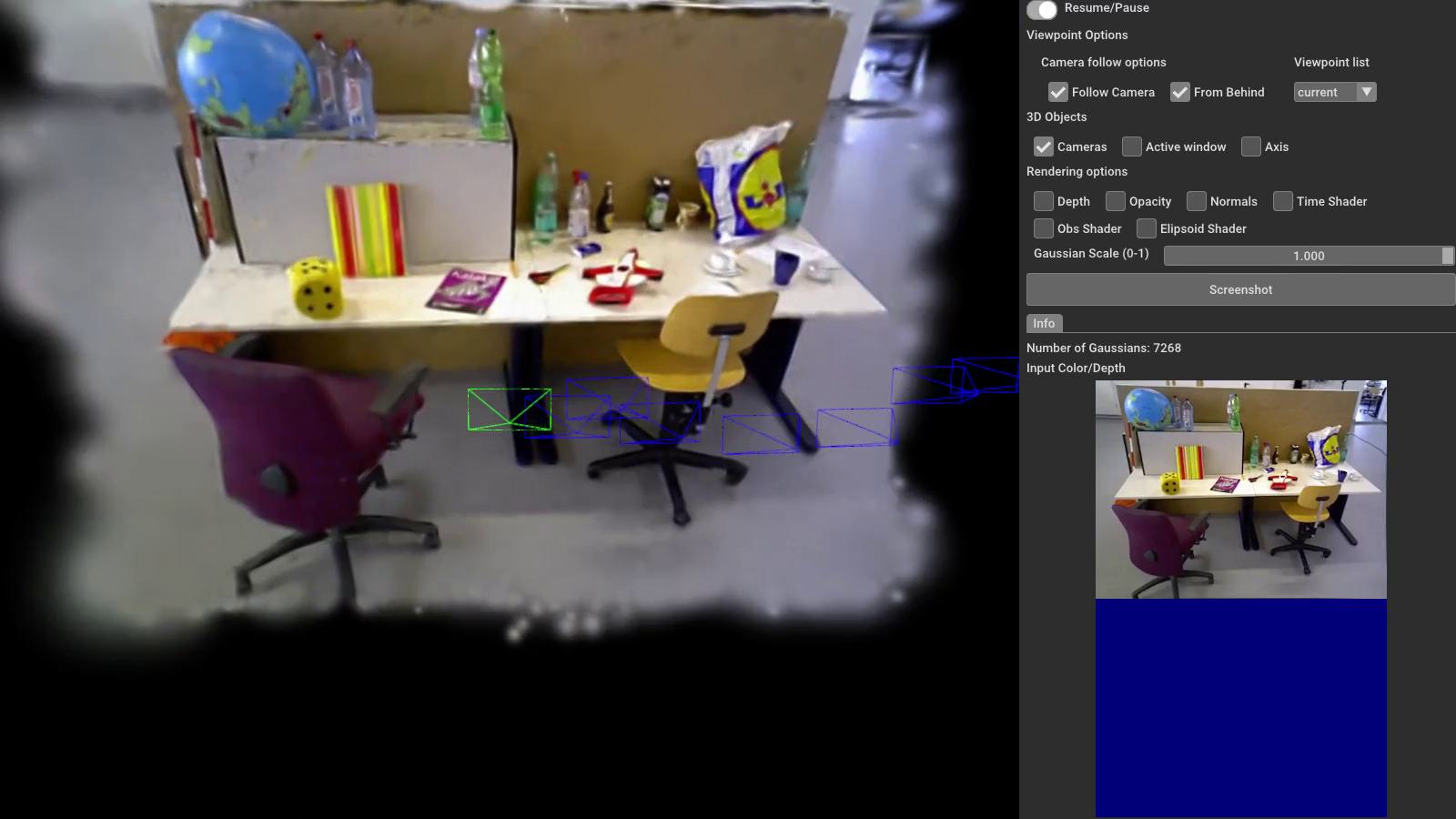
系统的一大亮点是其强大的可视化能力。通过集成的GUI界面,用户可以实时观察到SLAM过程中的相机轨迹、重建的3D场景以及当前视角的图像渲染结果。这不仅方便了研究人员进行算法调试和性能分析,也为实际应用中的用户提供了直观的反馈。
多样化的应用场景
MonoGS的应用前景十分广阔。在室内导航领域,它可以为机器人提供精确的定位和环境感知能力。在增强现实(AR)应用中,MonoGS能够实现高质量的实时场景重建,为用户带来更加沉浸的交互体验。此外,在自动驾驶、无人机测绘等领域,MonoGS的技术也有望发挥重要作用。
特别值得一提的是,MonoGS还支持使用RealSense等深度相机进行实时演示。这为研究人员和开发者提供了一个便捷的测试平台,可以快速验证算法在实际硬件上的表现。
开源与社区贡献
MonoGS项目采用开源的方式发布,这极大地促进了技术的传播和创新。研究人员在GitHub上提供了详细的安装指南和使用说明,使得interested开发者可以轻松地复现实验结果并进行二次开发。
项目团队还积极吸收社区反馈,不断优化代码性能。例如,在最新的开发分支中,他们实现了高达10fps的处理速度,这对于实时SLAM系统来说是一个显著的进步。
技术挑战与未来展望
尽管MonoGS取得了令人瞩目的成果,但在实际应用中仍面临一些挑战。例如,如何在保证精度的同时进一步提高系统的运行速度,以及如何更好地处理动态场景,都是未来研究的重点方向。
此外,随着深度学习技术在计算机视觉领域的广泛应用,如何将神经网络与高斯飞溅SLAM有机结合,也是一个值得探索的方向。这可能会进一步提升系统的鲁棒性和适应性。
结语
MonoGS项目的成功不仅标志着SLAM技术的一次重要突破,也为计算机视觉和机器人学领域的研究者们提供了新的思路和工具。随着技术的不断完善和应用范围的扩大,我们有理由相信,MonoGS将在未来的智能系统中发挥越来越重要的作用,推动相关领域的技术革新和产业升级。
对于有志于探索SLAM技术前沿的研究者和开发者来说,MonoGS无疑是一个值得深入研究的项目。通过参与这个开源社区,不仅可以学习最新的技术,还有机会为这一革命性技术的发展贡献自己的力量。让我们共同期待MonoGS在未来带来更多令人惊叹的应用和突破!









