
BehaviorTree.CPP: 强大而灵活的C++行为树库
BehaviorTree.CPP是一个功能强大的C++行为树库,为开发人员提供了构建复杂AI行为的灵活框架。该库基于C++17标准开发,专为机器人和游戏AI等应用场景设计,具有许多独特而强大的特性。
主要特点
BehaviorTree.CPP相比其他行为树实现有以下几个突出优势:
-
异步执行支持:将非阻塞的异步动作作为一等公民对待,使得开发反应式行为更加容易。
-
反应式行为:可以构建能够并发执行多个动作的反应式行为。
-
运行时加载:使用基于XML的领域特定语言定义树结构,可以在运行时动态加载,而不是硬编码在C++代码中。
-
插件系统:自定义节点可以静态链接或编译为插件在运行时加载。
-
类型安全的数据流:提供了在树节点间传递数据的灵活而类型安全的机制。
-
日志和分析:内置日志和性能分析基础设施,方便可视化、记录、回放和分析状态转换。
这些特性使BehaviorTree.CPP成为一个独特而强大的行为树库,特别适合需要高度灵活性和反应性的复杂AI系统。
应用场景
虽然BehaviorTree.CPP主要面向机器人领域,但它的应用范围远不止于此。该库可以用于:
- 机器人控制系统
- 游戏AI
- 替代有限状态机的场景
- 任何需要复杂决策逻辑的软件系统
其灵活性和强大的功能使其能够适应各种不同的应用需求。
使用方法
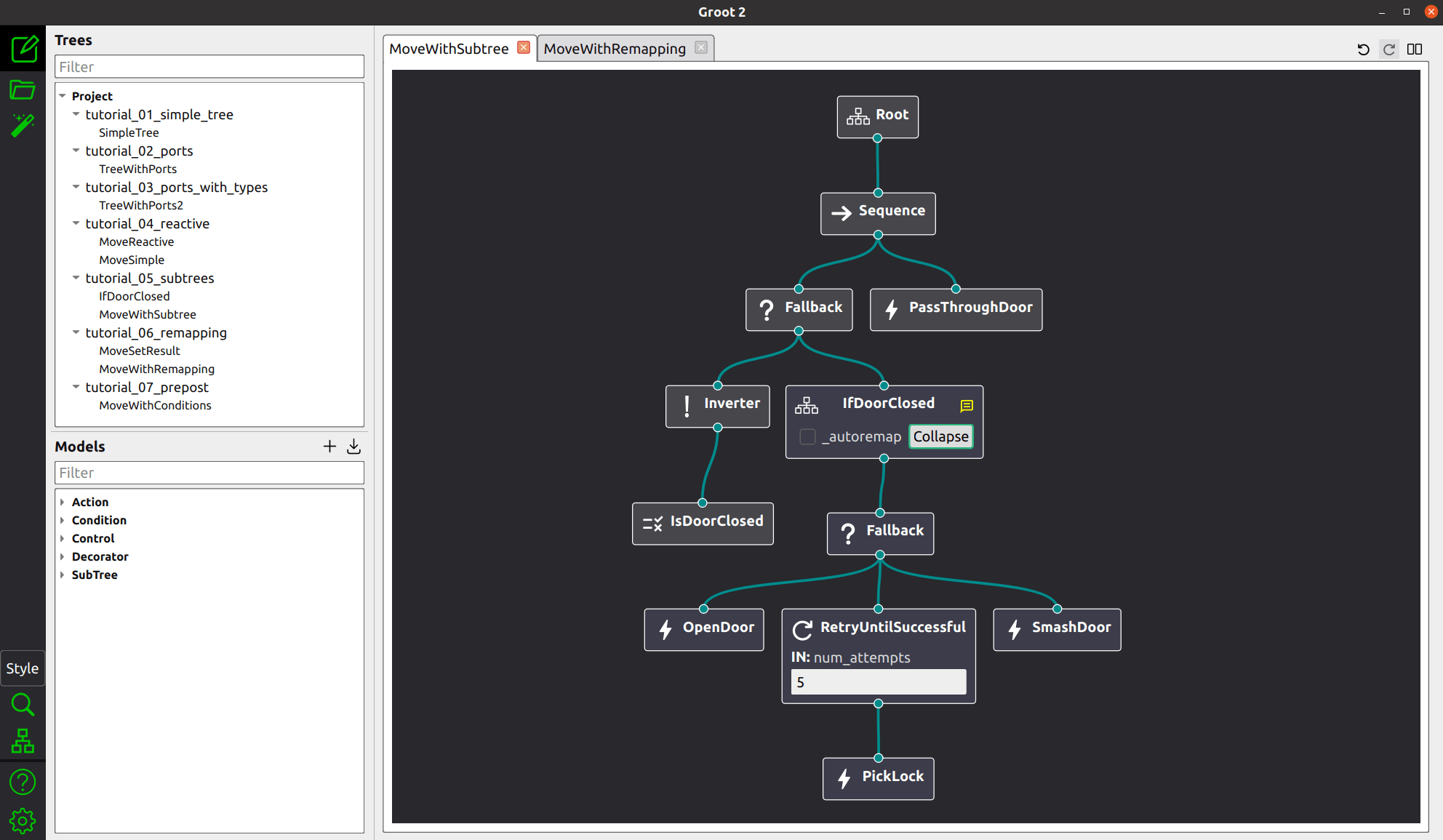
使用BehaviorTree.CPP构建行为树非常简单直观。开发者可以通过编辑XML文件来定义树结构,也可以使用提供的图形化编辑器Groot2来可视化设计行为树。
以下是一个简单的行为树XML示例:
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<Sequence name="root_sequence">
<Action ID="SayHello"/>
<Action ID="OpenGripper"/>
<Action ID="ApproachObject"/>
<Action ID="CloseGripper"/>
</Sequence>
</BehaviorTree>
</root>
这定义了一个简单的抓取物体的行为序列。开发者只需要实现相应的Action节点,就可以轻松构建复杂的行为逻辑。
安装和编译
BehaviorTree.CPP支持多种构建系统,包括:
- catkin (用于ROS)
- colcon (用于ROS2)
- conan
- CMake
使用conan编译的基本步骤如下:
mkdir build; cd build
conan install ../BehaviorTree.CPP --output-folder=. --build=missing
cmake ../BehaviorTree.CPP -DCMAKE_TOOLCHAIN_FILE="conan_toolchain.cmake"
cmake --build . --parallel
社区支持
BehaviorTree.CPP拥有活跃的开发者社区。用户可以通过以下方式获取支持:
- 官方文档: https://www.behaviortree.dev/
- GitHub讨论区: https://github.com/BehaviorTree/BehaviorTree.CPP/discussions
- 商业支持: 可联系主要作者获取技术支持和咨询服务
此外,该项目在GitHub上已获得2.9k+星标,641次fork,显示了其在开发者社区的受欢迎程度。
总结
BehaviorTree.CPP为C++开发者提供了一个功能强大、灵活易用的行为树库。无论是在机器人、游戏AI还是其他复杂系统开发中,它都是一个值得考虑的选择。其独特的特性如异步执行、反应式行为、运行时加载等,使其在同类库中脱颖而出。如果你正在寻找一个可靠的行为树解决方案,BehaviorTree.CPP绝对值得一试。
通过使用BehaviorTree.CPP,开发者可以更轻松地构建复杂、可维护的AI系统,提高开发效率,并为项目带来更大的灵活性。无论你是机器人工程师、游戏开发者,还是对AI系统感兴趣的程序员,BehaviorTree.CPP都能为你的项目增添价值。
随着AI和自动化技术的不断发展,像BehaviorTree.CPP这样的工具将在未来扮演越来越重要的角色。通过持续的社区贡献和维护,我们可以期待看到这个库在未来得到更多的改进和应用。现在就开始探索BehaviorTree.CPP,为你的下一个AI项目打下坚实的基础吧!











