Gaussian-SLAM:开创性的高斯散射SLAM技术
近年来,同时定位与地图构建(SLAM)技术在计算机视觉和机器人领域取得了巨大进展。然而,在真实世界场景中实现高质量、逼真的3D重建仍然面临挑战。最近,来自阿姆斯特丹大学的研究团队提出了一种名为Gaussian-SLAM的创新方法,通过结合高斯散射技术,在这一领域取得了突破性进展。
突破性的场景表示方法
Gaussian-SLAM的核心创新在于采用3D高斯函数作为场景的基本表示单元。与传统方法相比,这种表示方式具有以下优势:
- 能够更准确地编码场景几何信息
- 易于从单视角序列图像中进行优化
- 支持高质量、逼真的实时渲染
研究人员通过扩展经典3D高斯表示,设计了新颖的场景表示方法。这种表示不仅能够编码几何信息,还能有效地从单视角序列图像中进行优化,克服了之前方法在单目设置下的局限性。
高效的在线优化策略
为了实现对大规模场景的实时重建,Gaussian-SLAM采用了一种新颖的优化策略:
- 将场景划分为多个子地图
- 对每个子地图进行独立优化
- 无需将整个场景保存在内存中
这种策略使得系统能够高效地处理大规模场景,同时保持较低的内存占用。
实时渲染与高质量重建
得益于高斯散射技术的高效渲染特性,Gaussian-SLAM能够实现场景的实时渲染。这为用户提供了即时的视觉反馈,大大提升了系统的交互性。同时,该方法还能够生成高质量的3D重建结果,包括:
- 精确的几何信息
- 逼真的纹理细节
- 对透明物体的准确重建
广泛的应用前景
Gaussian-SLAM的出现为多个领域带来了新的可能性:
- 增强现实(AR): 提供更加逼真、稳定的AR体验
- 机器人导航: 为机器人提供更加精确的环境感知能力
- 虚拟制作: 支持高质量的实时场景捕捉与重建
- 文化遗产保护: 实现历史遗迹的高精度数字化保存
与现有方法的对比
研究团队在多个公开数据集上对Gaussian-SLAM进行了评估,包括TUM-RGBD、ScanNet等。结果表明,Gaussian-SLAM在以下方面显著优于现有方法:
- 重建质量: 生成的3D模型更加精确、逼真
- 渲染效果: 支持高质量、实时的场景渲染
- 鲁棒性: 对具有挑战性的场景(如透明物体)表现出色
技术实现细节
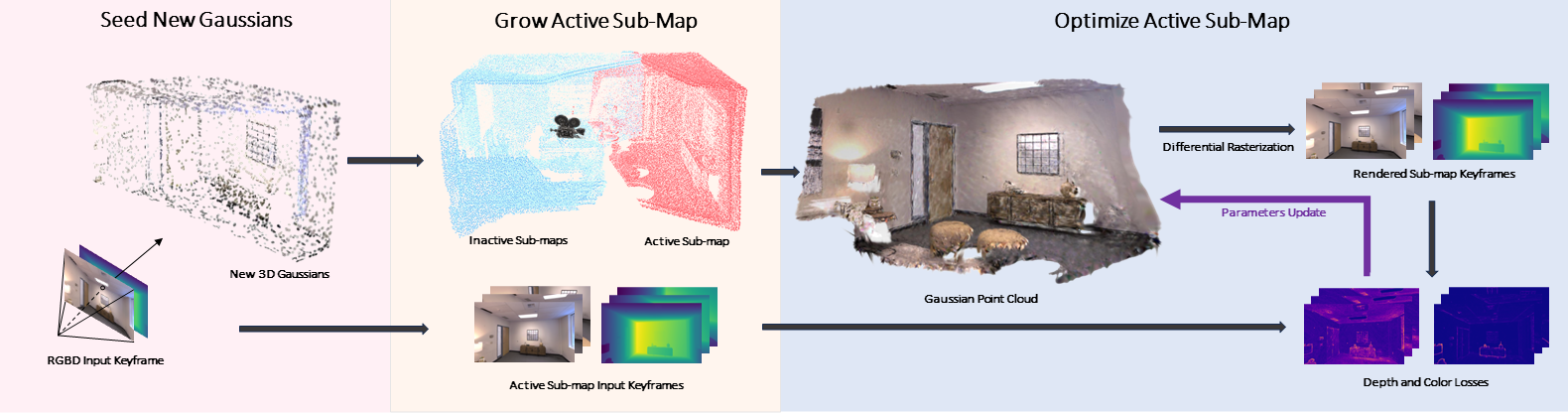
Gaussian-SLAM的实现涉及多个关键技术点:
- 高斯初始化: 根据输入的RGBD关键帧,对新的3D高斯进行采样和初始化
- 子地图管理: 将场景划分为多个活跃子地图,实现高效的内存管理
- 损失函数设计: 结合深度和颜色信息,优化高斯参数
- 几何正则化: 引入几何验证和正则化,处理增量3D重建中的模糊性
未来研究方向
尽管Gaussian-SLAM取得了显著成果,研究团队仍然指出了一些值得进一步探索的方向:
- 实时性能优化: 进一步提升系统的运行速度,实现更高的帧率
- 大规模场景重建: 探索处理更大规模、更复杂场景的策略
- 多传感器融合: 结合其他类型的传感器数据,提升重建质量
- 语义理解: 将语义信息融入重建过程,实现更智能的场景理解
结论
Gaussian-SLAM的提出代表了SLAM技术的一个重要里程碑。它不仅在重建质量和渲染效果上取得了突破,还为实时、逼真的3D场景重建开辟了新的可能性。随着进一步的研究和优化,Gaussian-SLAM有望在更广泛的应用领域发挥重要作用,推动计算机视觉和机器人技术的发展。
对于开发者和研究人员来说,Gaussian-SLAM提供了一个强大的工具和研究平台。项目的开源代码允许社区贡献者进行进一步的改进和扩展。同时,相关的技术论文详细阐述了方法的理论基础,为深入理解和改进该技术提供了宝贵资源。
Gaussian-SLAM的成功开发离不开研究团队的努力,以及开源社区的支持。随着技术的不断进步,我们可以期待在不久的将来,更加逼真、智能的3D场景重建技术将成为现实,为我们的日常生活和工作带来革命性的变化。









