
Hierarchical-Localization: 让视觉定位变得简单易用的工具箱
Hierarchical-Localization (hloc) 是一个用于大规模6自由度视觉定位的模块化工具箱。它实现了分层定位算法,利用图像检索和特征匹配,具有快速、准确和可扩展的特点。该代码库整合了多年来图像匹配和运动结构重建(Structure-from-Motion)方面的研究成果,使其易于使用。
主要功能
使用 hloc,您可以:
- 在多个室内和室外视觉定位基准上复现最先进的结果
- 使用 SuperPoint+SuperGlue 运行运动结构重建(SfM),定位您自己的数据集
- 评估您自己的局部特征或图像检索用于视觉定位
- 实现新的定位管道并轻松调试 🔥
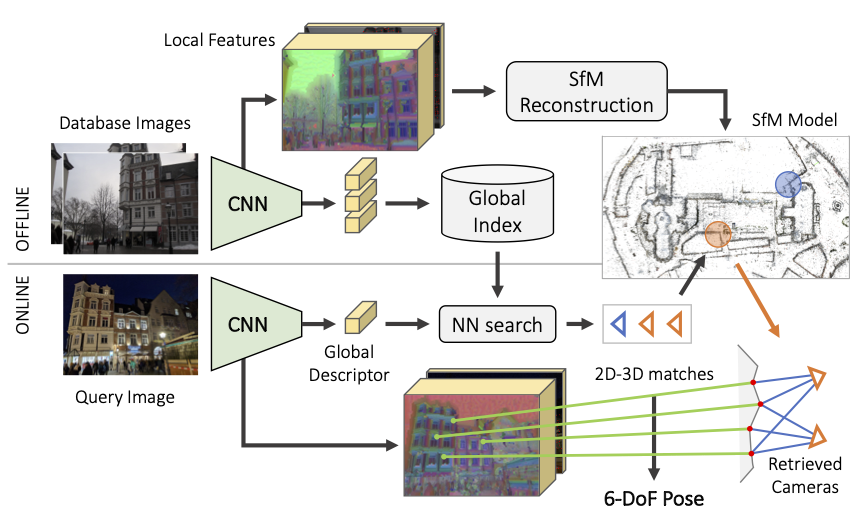 分层定位同时利用图像检索和特征匹配
分层定位同时利用图像检索和特征匹配
快速开始
您现在可以在 Google Colab 中免费使用 GPU 运行 hloc 和 COLMAP 了! notebook demo.ipynb 展示了如何仅需几个步骤就可以运行 SfM 和定位。试试用您自己的数据,我们很想听听您的反馈!
安装
hloc 需要 Python >=3.7 和 PyTorch >=1.1。在本地安装软件包会拉取其他依赖项:
git clone --recursive https://github.com/cvg/Hierarchical-Localization/
cd Hierarchical-Localization/
python -m pip install -e .
所有依赖项都列在 requirements.txt 中。从 hloc-v1.3 开始,不再需要安装 COLMAP。 该存储库包含外部局部特征作为 git 子模块 - 别忘了用 git submodule update --init --recursive 拉取子模块。
我们还提供了一个 Docker 镜像:
docker build -t hloc:latest .
docker run -it --rm -p 8888:8888 hloc:latest # 对于 GPU 支持,添加 `--runtime=nvidia`
jupyter notebook --ip 0.0.0.0 --port 8888 --no-browser --allow-root
通用管道
该工具箱由脚本组成,大致执行以下步骤:
- 为所有数据库和查询图像提取局部特征,如 SuperPoint 或 DISK
- 构建参考 3D SfM 模型
- 使用检索找到与每个查询相关的数据库图像
- 匹配查询图像
- 运行定位
- 可视化和调试
然后可以在 visuallocalization.net 上评估支持的数据集的定位。当有 3D LiDAR 扫描可用时,例如对于室内数据集 InLoc,可以跳过步骤 2。
工具箱的结构:
hloc/*.py: 顶层脚本hloc/extractors/: 特征提取器接口hloc/matchers/: 特征匹配器接口hloc/pipelines/: 多个数据集的完整管道
hloc 可以作为外部包导入 import hloc,也可以从命令行调用:
python -m hloc.name_of_script --arg1 --arg2
任务
我们提供了使用 Aachen、InLoc 定位以及使用 SfM 为您自己的数据生成参考姿态的分步指南。只需下载数据集,您就可以开始了!
Aachen - 室外定位
查看 pipeline_Aachen.ipynb 获取使用 Aachen 定位的分步指南。使用可视化工具,尝试新的局部特征或匹配器,享受其中的乐趣!不喜欢笔记本?您也可以从命令行运行所有脚本。

InLoc - 室内定位
notebook pipeline_InLoc.ipynb 展示了使用 InLoc 定位的步骤。这要简单得多,因为不需要 3D SfM 模型。

从头开始进行 SfM 重建
我们在 pipeline_SfM.ipynb 中展示了如何为无序图像集运行 3D 重建。这会生成参考姿态,以及适合使用与 Aachen 相同管道进行定位的良好稀疏 3D 模型。
结果
- 支持的局部特征提取器: SuperPoint、DISK、D2-Net、SIFT 和 R2D2。
- 支持的特征匹配器: SuperGlue、其更快的后续版本 LightGlue,以及具有比率测试、距离测试和/或相互检查的最近邻搜索。hloc 还支持使用 LoFTR 进行密集匹配。
- 支持的图像检索: NetVLAD、AP-GeM/DIR、OpenIBL、CosPlace 和 EigenPlaces。
使用 NetVLAD 进行检索,我们获得了以下最佳结果:
| 方法 | Aachen 白天 | Aachen 夜晚 | 检索 |
|---|---|---|---|
| SuperPoint + SuperGlue | 89.6 / 95.4 / 98.8 | 86.7 / 93.9 / 100 | NetVLAD top 50 |
| SuperPoint + NN | 85.4 / 93.3 / 97.2 | 75.5 / 86.7 / 92.9 | NetVLAD top 30 |
| D2Net (SS) + NN | 84.6 / 91.4 / 97.1 | 83.7 / 90.8 / 100 | NetVLAD top 30 |
| 方法 | InLoc DUC1 | InLoc DUC2 | 检索 |
|---|---|---|---|
| SuperPoint + SuperGlue | 46.5 / 65.7 / 78.3 | 52.7 / 72.5 / 79.4 | NetVLAD top 40 |
| SuperPoint + SuperGlue (temporal) | 49.0 / 68.7 / 80.8 | 53.4 / 77.1 / 82.4 | NetVLAD top 40 |
| SuperPoint + NN | 39.9 / 55.6 / 67.2 | 37.4 / 57.3 / 70.2 | NetVLAD top 20 |
| D2Net (SS) + NN | 39.9 / 57.6 / 67.2 | 36.6 / 53.4 / 61.8 | NetVLAD top 20 |
查看 visuallocalization.net/benchmark 获取更多详细信息和其他基准。
支持的数据集
我们在 hloc/pipelines/ 中提供了脚本,用于在以下数据集上运行重建和定位:Aachen Day-Night (v1.0 和 v1.1)、InLoc、Extended CMU Seasons、RobotCar Seasons、4Seasons、Cambridge Landmarks 和 7-Scenes。例如,在按照这里给出的说明下载数据集后,我们可以使用以下命令运行使用 SuperPoint+SuperGlue 的 Aachen Day-Night 管道:
python -m hloc.pipelines.Aachen.pipeline [--outputs ./outputs/aachen]
BibTex 引用
如果您在出版物中报告上述任何结果,或使用此处提供的任何工具,请考虑同时引用 Hierarchical Localization 和 SuperGlue 论文:
@inproceedings{sarlin2019coarse,
title = {From Coarse to Fine: Robust Hierarchical Localization at Large Scale},
author = {Paul-Edouard Sarlin and
Cesar Cadena and
Roland Siegwart and
Marcin Dymczyk},
booktitle = {CVPR},
year = {2019}
}
@inproceedings{sarlin2020superglue,
title = {{SuperGlue}: Learning Feature Matching with Graph Neural Networks},
author = {Paul-Edouard Sarlin and
Daniel DeTone and
Tomasz Malisiewicz and
Andrew Rabinovich},
booktitle = {CVPR},
year = {2020},
}
进一步探索
调试和可视化
每次定位运行都会生成一个 pickle 日志文件。对于每个查询,它包含选定的数据库图像、它们的匹配以及来自姿态求解器的信息,例如 RANSAC 内点。因此,可以解析它以收集统计数据并分析失败模式或困难场景。
我们还在 hloc/visualization.py 中提供了一些可视化工具,用于可视化 3D SfM 模型的一些属性,例如关键点的可见性、它们的跟踪长度或估计的稀疏深度(如下所示)。

使用您自己的局部特征或匹配器
如果您的代码基于 PyTorch:只需在 hloc/extractors/ 或 hloc/matchers/ 中添加一个新接口。它需要继承自 hloc.utils.base_model.BaseModel,将数据字典作为输入,并输出预测字典。参考 hloc/extractors/superpoint.py 获取示例。您还可以在 hloc/extract_features.py 或 hloc/match_features.py 中定义标准配置 - 然后可以直接









