
Octo: 革新机器人控制的通用策略模型
在人工智能和机器人技术快速发展的今天,一个能够适应多种任务和环境的通用机器人策略模型成为了研究的热点。Octo项目应运而生,它是一个基于Transformer的机器人策略模型,通过大规模、多样化的数据集训练,旨在实现灵活、高效的机器人控制。
Octo模型简介
Octo是由研究人员开发的开源通用机器人策略模型。它的核心是一个基于Transformer架构的扩散策略网络,经过了800,000多个不同类型的机器人轨迹数据的训练。这种大规模、多样化的训练数据使Octo具备了适应不同任务和环境的能力,成为一个真正的"通用"模型。
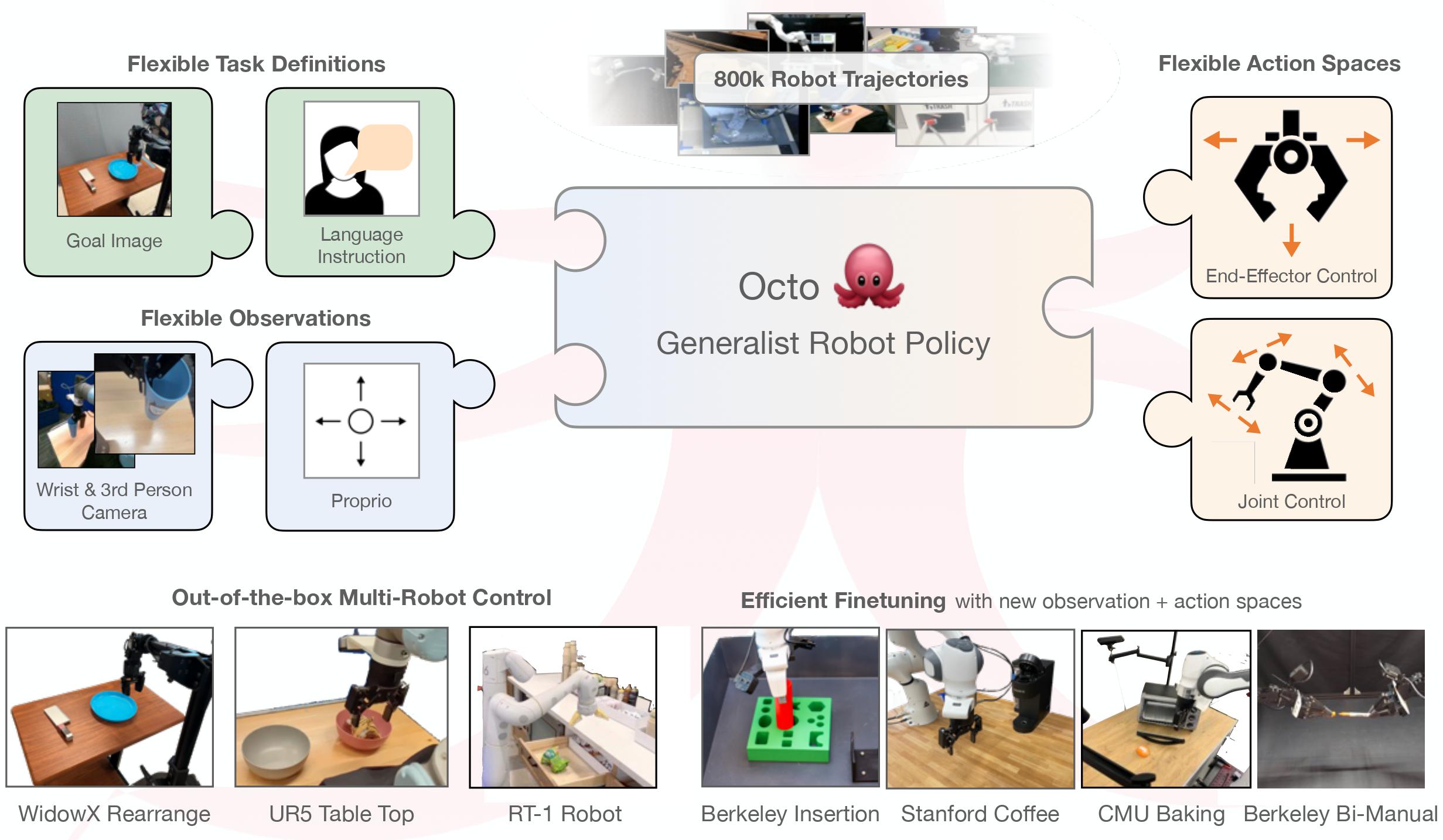
Octo模型的主要特点包括:
- 多模态输入支持:可以处理多个RGB摄像头输入。
- 灵活的控制能力:能够控制各种类型的机器人手臂。
- 多种指令方式:支持语言命令和目标图像作为指令输入。
- 模块化注意力结构:在Transformer主干网络中采用模块化注意力结构,便于在新的感知输入、动作空间和形态学上进行微调。
模型架构与性能
Octo提供了两个版本的预训练模型:
- Octo-Base:93M参数,在NVIDIA 4090 GPU上可达到13次迭代/秒的推理速度。
- Octo-Small:27M参数,推理速度可达17次迭代/秒。
这两个版本在性能和计算需求之间提供了不同的平衡,用户可以根据具体需求选择合适的模型。
安装与使用
Octo项目提供了详细的安装指南,用户可以通过以下步骤快速搭建环境:
conda create -n octo python=3.10
conda activate octo
pip install -e .
pip install -r requirements.txt
对于GPU用户,还需要安装相应的JAX CUDA支持:
pip install --upgrade "jax[cuda11_pip]==0.4.20" -f https://storage.googleapis.com/jax-releases/jax_cuda_releases.html
安装完成后,可以通过简单的Python代码加载和使用Octo模型:
from octo.model.octo_model import OctoModel
model = OctoModel.load_pretrained("hf://rail-berkeley/octo-base-1.5")
print(model.get_pretty_spec())
模型训练与微调
Octo项目不仅提供了预训练模型,还支持用户进行进一步的训练和微调。项目提供了预训练脚本,用户可以通过以下命令复现Octo的训练过程:
python scripts/train.py --config scripts/configs/octo_pretrain_config.py:<size> --name=octo --config.dataset_kwargs.oxe_kwargs.data_dir=... --config.dataset_kwargs.oxe_kwargs.data_mix=oxe_magic_soup ...
对于微调,Octo提供了多种模式,包括仅微调输出层、微调MLP层和输出层、以及全模型微调。用户可以根据具体需求选择合适的微调策略。
应用场景与评估
Octo模型的通用性使其能够适应多种机器人控制任务。项目提供了在模拟环境和真实WidowX机器人上进行评估的示例代码。用户可以轻松地将Octo模型集成到自己的机器人系统中,只需将环境包装成Gym接口即可。
开源社区与贡献
Octo是一个开源项目,欢迎社区成员参与贡献。项目在GitHub上提供了详细的代码结构说明,包括核心模块如数据集处理、模型架构、训练循环等的位置和功能介绍。这有助于开发者理解项目结构,并进行二次开发或改进。
最新更新与未来展望
Octo项目持续更新,最新的1.5版本带来了多项改进:
- 增强了视觉和语言标记之间的交叉注意力机制。
- 使用GPT-3.5对数据集中的语言指令进行了扩充和重述。
- 修复了多个关键bug,如扩散头中的dropout问题、注意力掩码的偏移错误等。
这些更新进一步提升了Octo模型的性能和稳定性,为未来的研究和应用奠定了基础。
结语
Octo项目代表了机器人控制领域的一个重要里程碑。通过大规模、多样化的数据训练,结合先进的Transformer架构,Octo模型展现了通用机器人策略的巨大潜力。它不仅为研究人员提供了宝贵的研究工具,也为实际应用中的机器人控制带来了新的可能性。
随着项目的不断发展和社区的积极参与,我们可以期待看到更多基于Octo的创新应用,推动机器人技术向更智能、更灵活的方向发展。无论是在工业自动化、医疗辅助、还是家庭服务等领域,Octo都有可能带来革命性的变革。
对于有志于探索机器人控制前沿的研究者和开发者来说,Octo项目无疑是一个极具价值的资源。通过深入研究Octo的代码、参与社区讨论、贡献自己的改进,每个人都有机会在这个激动人心的领域留下自己的印记,共同推动机器人技术的进步。
让我们共同期待Octo项目的未来发展,见证机器人技术带来的更多惊喜和可能性!









