
RoboHive:开创机器人学习新时代的统一框架
在人工智能领域取得巨大进展的同时,机器人学习的发展却相对缓慢。这种现象部分归因于机器人学习软件框架的复杂性以及缺乏通用的基准测试。为了解决这一问题,来自华盛顿大学、加州大学伯克利分校、卡内基梅隆大学等顶尖研究机构的科学家们共同开发了RoboHive——一个专为机器人学习设计的统一框架。
RoboHive的核心特性
RoboHive不仅仅是一个简单的仿真环境,它是一个完整的生态系统,为机器人学习研究提供了全方位的支持。以下是RoboHive的一些关键特性:
-
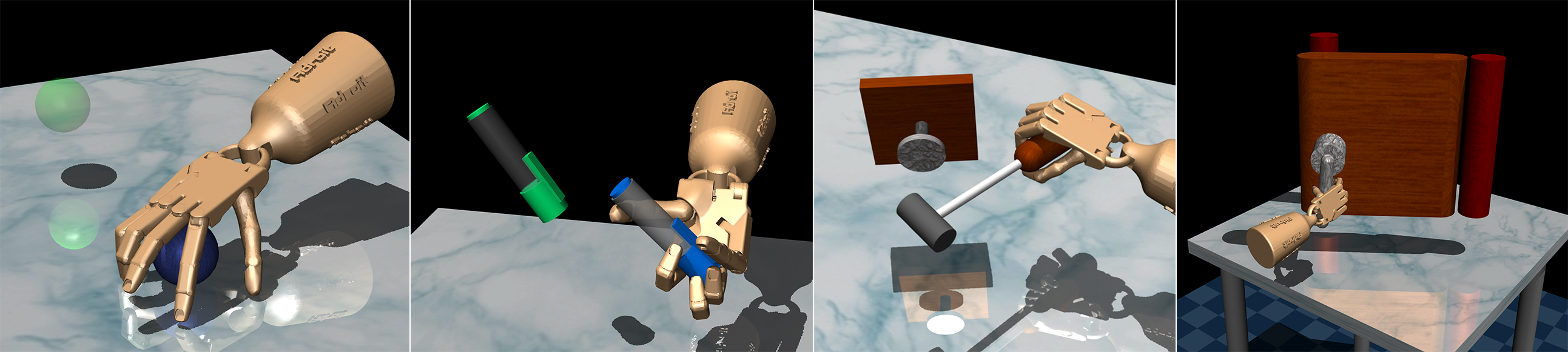
环境动物园: RoboHive提供了丰富多样的环境,涵盖了从灵巧手操作到四足机器人运动等多个研究领域。这些环境都基于MuJoCo物理引擎构建,确保了高度的物理仿真精度。
-
统一的机器人抽象: RoboHive引入了RobotClass抽象,实现了虚拟和实体机器人的无缝交互。这一特性使研究人员能够轻松地将仿真中的发现转化为现实世界的应用。
-
远程操作支持: RoboHive内置了多种远程操作模式,包括键盘、3D空间鼠标和虚拟现实控制器。同时,它还提供了RoboSet数据集,这是目前最大的真实世界机器人操作数据集之一。
-
视觉多样性和物理保真度: RoboHive特别强调高物理仿真度和丰富的视觉多样性。它包含了复杂的资产、丰富的纹理和增强的场景布置,将视觉运动控制研究与日常生活中的视觉挑战联系起来。
-
评估指标和基准: RoboHive采用简洁明确的指标来评估不同情况下的算法性能。它提供了一个用户友好的gym风格API,方便与各种学习算法集成。此外,RoboHive还包含了常用算法的详细基准结果,为性能比较和研究提供了参考标准。
RoboHive的应用领域
RoboHive的多功能性使其能够应用于多个机器人学习领域:
-
灵巧手操作: RoboHive包含了一系列以灵巧操作为中心的环境,包括标准的ADROIT基准测试。这些环境为研究复杂的手部动作和精细操作提供了理想的平台。
-
机械臂操作: RoboHive提供了一系列以机械臂操作为中心的环境,涵盖了从简单的抓取任务到复杂的组装任务。
-
肌肉骨骼控制: MyoSuite是RoboHive中专注于肌肉骨骼控制的环境集合。这些环境为研究生物启发的控制策略提供了宝贵的资源。
-
多任务学习: RoboHive的MultiTask Suite为研究多任务学习和任务泛化提供了理想的环境。
快速上手RoboHive
RoboHive的设计理念之一就是易用性。研究人员可以通过简单的几个步骤就能开始使用RoboHive:
-
安装RoboHive:
pip install robohive -
初始化RoboHive:
robohive_init -
演示一个环境:
python -m robohive.utils.examine_env -e FrankaReachRandom-v0
对于需要进行更深入开发的研究人员,RoboHive也提供了可编辑安装选项:
git clone --recursive https://github.com/vikashplus/robohive.git
cd robohive
pip install -e .
RoboHive的未来展望
RoboHive团队正在不断扩展和完善这个框架。未来的计划包括:
-
TCDM Suite: 这个套件将包含一系列以灵巧操作为中心的环境,包括标准的TCDM基准测试。
-
ROBEL Suite: 这个即将推出的套件将专注于真实世界的运动和操作任务,包括标准的ROBEL基准测试。
-
持续的社区贡献: RoboHive是一个开源项目,欢迎来自全球研究者的贡献。通过GitHub上的星标和代码贡献,每个人都可以参与到这个激动人心的项目中来。
结语
RoboHive的出现标志着机器人学习研究进入了一个新的时代。它不仅提供了丰富的仿真环境和强大的工具,更重要的是,它为整个研究社区提供了一个统一的平台。通过RoboHive,研究人员可以更容易地复现彼此的工作,比较不同算法的性能,并将研究成果从仿真转化为现实世界的应用。
随着RoboHive的不断发展和完善,我们有理由相信,它将成为推动机器人学习和人工智能领域快速发展的重要力量。无论你是刚刚踏入这个领域的新手,还是经验丰富的研究者,RoboHive都将是你不可或缺的得力助手。让我们一起期待RoboHive带来的无限可能,共同推动机器人技术的进步。









