
 访问官网
访问官网 Github
Github 文档
文档 论文
论文



![]()
RoboHive is a collection of environments/tasks simulated with the MuJoCo physics engine exposed using the OpenAI-Gym API. Its compatible with any gym-compatible agents training framework (Stable Baselines, RLlib, TorchRL, AgentHive, etc)
Getting Started
Getting started with RoboHive is as simple as -
# Install RoboHive
pip install robohive
# Initialize RoboHive
robohive_init
# Demo an environment
python -m robohive.utils.examine_env -e FrankaReachRandom-v0
or, alternatively for editable installation -
# Clone RoboHive
git clone --recursive https://github.com/vikashplus/robohive.git; cd robohive
# Install (editable) RoboHive
pip install -e .
# Demo an environment
python -m robohive.utils.examine_env -e FrankaReachRandom-v0
See detailed installation instructions for options on mujoco-python-bindings and visual-encoders (R3M, RRL, VC), and frequently asked questions for more details.
Suites
RoboHive contains a variety of environments, which are organized as suites. Each suite is a collection of loosely related environments. The following suites are provided at the moment with plans to improve the diversity of the collection.
| Hand-Manipulation-Suite (video) |
|---|
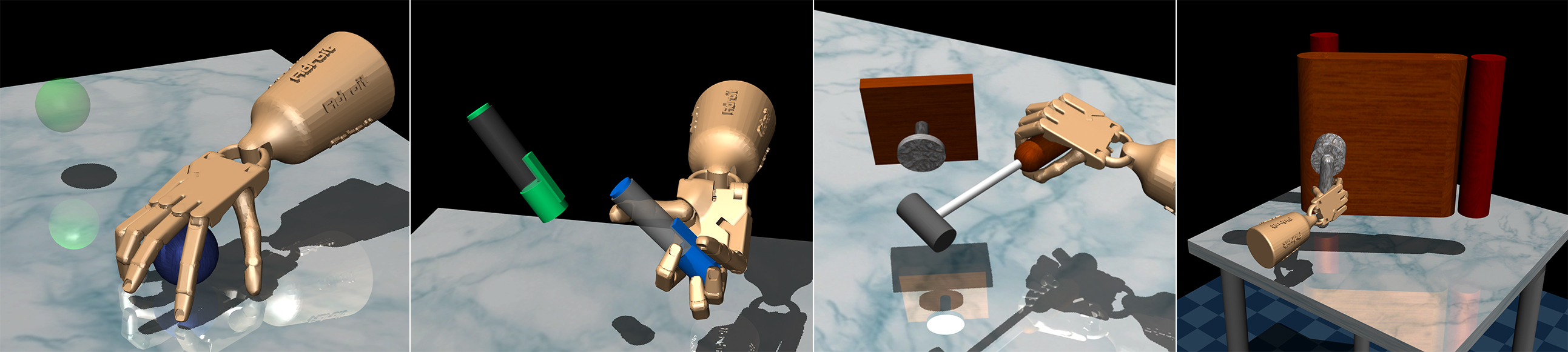 A collection of environments centered around dexterous manipulation. Standard ADROIT benchmarks introduced in Learning Complex Dexterous Manipulation with Deep Reinforcement Learning and Demonstrations, RSS2018.) are a part of this suite A collection of environments centered around dexterous manipulation. Standard ADROIT benchmarks introduced in Learning Complex Dexterous Manipulation with Deep Reinforcement Learning and Demonstrations, RSS2018.) are a part of this suite |
| Arm-Manipulation-Suite |
|---|
| Myo-Suite (website) |
|---|
| Myo/MyoDM-Suite (Website) |
|---|
| MultiTask Suite |
|---|
- TCDM Suite (WIP)
This suite contains a collection of environments centered around dexterous manipulation. Standard TCDM benchmarks are a part of this suite
- ROBEL Suite (Coming soon)
This suite contains a collection of environments centered around real-world locomotion and manipulation. Standard ROBEL benchmarks are a part of this suite
Citation
If you find RoboHive useful in your research,
- please consider supporting the project by providing a star ⭐
- please consider citing our project by using the following BibTeX entry:
@Misc{RoboHive2020,
title = {RoboHive -- A Unified Framework for Robot Learning},
howpublished = {\url{https://sites.google.com/view/robohive}},
year = {2020},
url = {https://sites.google.com/view/robohive},
}











