
ROScribe: 用AI重塑机器人软件开发
在当今快速发展的机器人技术领域,ROS(机器人操作系统)已成为事实上的标准框架。然而,对于初学者来说,ROS的学习曲线往往较为陡峭,甚至可能成为阻碍许多人进入这个激动人心领域的障碍。而对于经验丰富的工程师,尽管熟悉ROS,但在开发过程中仍需投入大量时间进行繁琐的配置和编码工作。为了解决这些挑战,ROScribe应运而生,这是一款革命性的工具,旨在彻底改变机器人软件开发的方式。
ROScribe: 智能助手与代码生成器的完美结合
ROScribe是由RoboCoach Technologies开发的开源工具,它巧妙地结合了大型语言模型(LLMs)的强大功能和灵活性,以及精心调校的提示技术。这种独特的组合使ROScribe能够通过自然语言界面捕捉用户的机器人设计细节,并自动生成完整的ROS包。
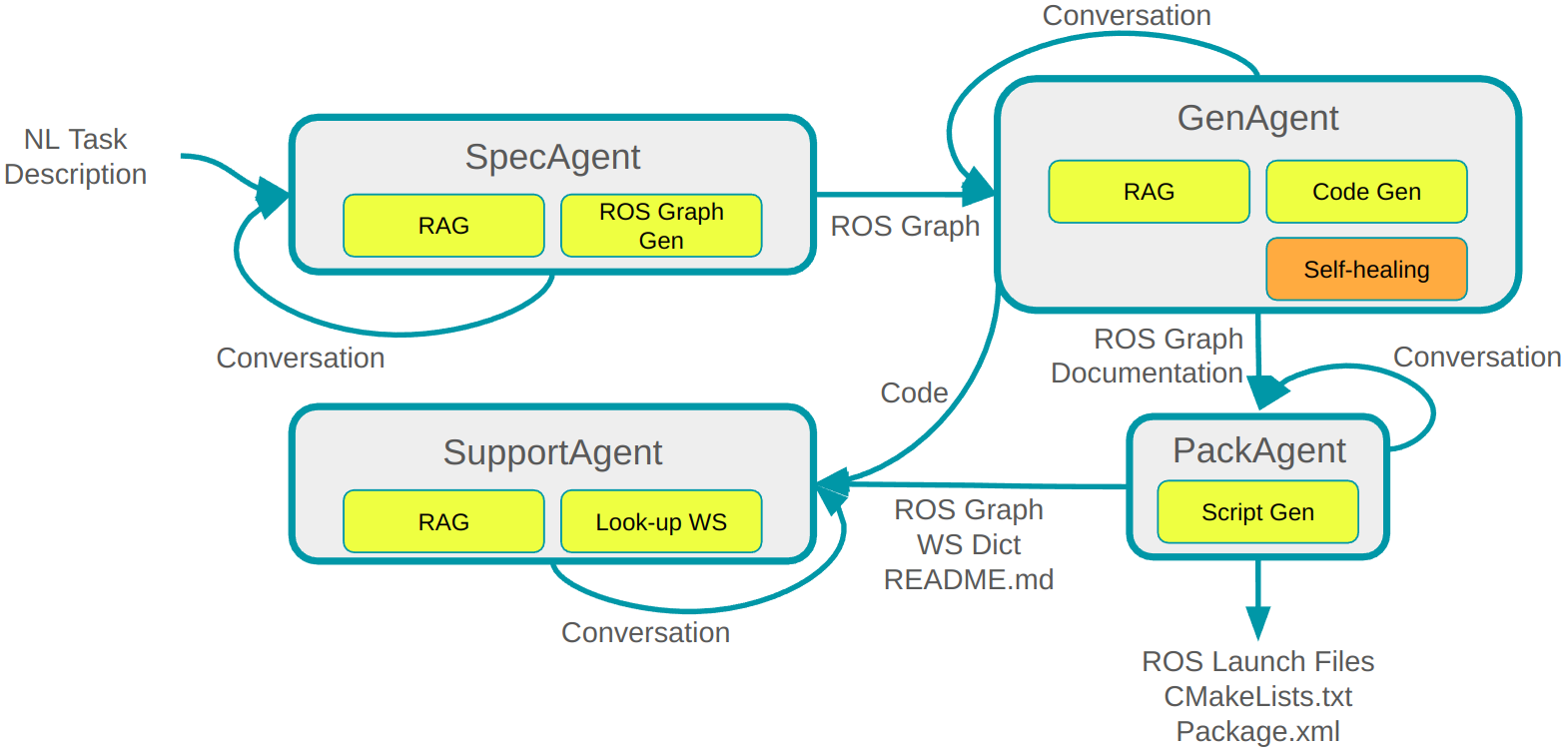
ROScribe的工作流程分为四个主要步骤,每一步都由专门的AI代理负责:
-
SpecAgent: 负责构建项目的整体骨架,创建ROS图,其中每个部分可以是AI生成的或从开源库中提取的。
-
GenAgent: 根据ROS图生成ROS工作空间和每个ROS节点的Python代码,或者下载开源实现。
-
PackAgent: 生成ROS启动文件、package.xml、CMakeLists.txt和README.md等必要文件。
-
SupportAgent: 作为客户支持代理,在项目运行过程中遇到错误时提供帮助。
ROScribe的优势
-
降低入门门槛: 对于ROS新手,ROScribe充当了一位耐心的机器人学导师,引导他们逐步完成复杂的ROS开发过程。
-
提高开发效率: 对于经验丰富的ROS用户,ROScribe可以快速创建ROS包的蓝图,大大缩短开发周期。
-
灵活性: ROScribe支持ROS 1和ROS 2,适用于各种机器人项目。
-
开源与社区驱动: 作为开源项目,ROScribe欢迎所有机器人爱好者的贡献,促进了知识共享和协作创新。
-
持续支持: ROScribe不仅协助项目的初始设置,还在整个项目生命周期中提供支持,解答问题并协助调试。
实际应用案例
ROScribe已在多个机器人项目中展示了其强大的功能。例如,在LiDAR同时定位与地图构建(SLAM)项目中,ROScribe成功地自动生成了完整的ROS工作空间,包括所有必要的节点、话题和启动文件。这大大加快了项目的开发速度,使研究人员能够更快地进行实验和迭代。
未来展望
RoboCoach Technologies团队正在积极开发ROScribe的新功能,包括:
- C++代码生成支持
- ROS 1到ROS 2的自动代码库迁移
- 图形用户界面(GUI)
- 与其他机器人工具的集成
这些planned特性将进一步增强ROScribe的功能,使其成为更全面的机器人软件开发平台。
结语
ROScribe代表了机器人软件开发的未来。通过将AI的力量与ROS的灵活性相结合,它不仅简化了开发过程,还打开了创新的大门。无论您是机器人学初学者还是经验丰富的工程师,ROScribe都能为您的项目带来巨大价值。我们鼓励所有对机器人技术感兴趣的人尝试ROScribe,体验AI辅助开发的魅力,并为这个开源项目做出贡献。
让我们携手共创机器人技术的美好未来!🚀🤖









