
Webots简介
Webots是一款开源的多平台机器人仿真软件,由瑞士联邦理工学院(EPFL)于1996年开发,后由Cyberbotics公司继续开发和商业化。2018年12月,Webots正式开源,成为了一个备受欢迎的机器人仿真平台。
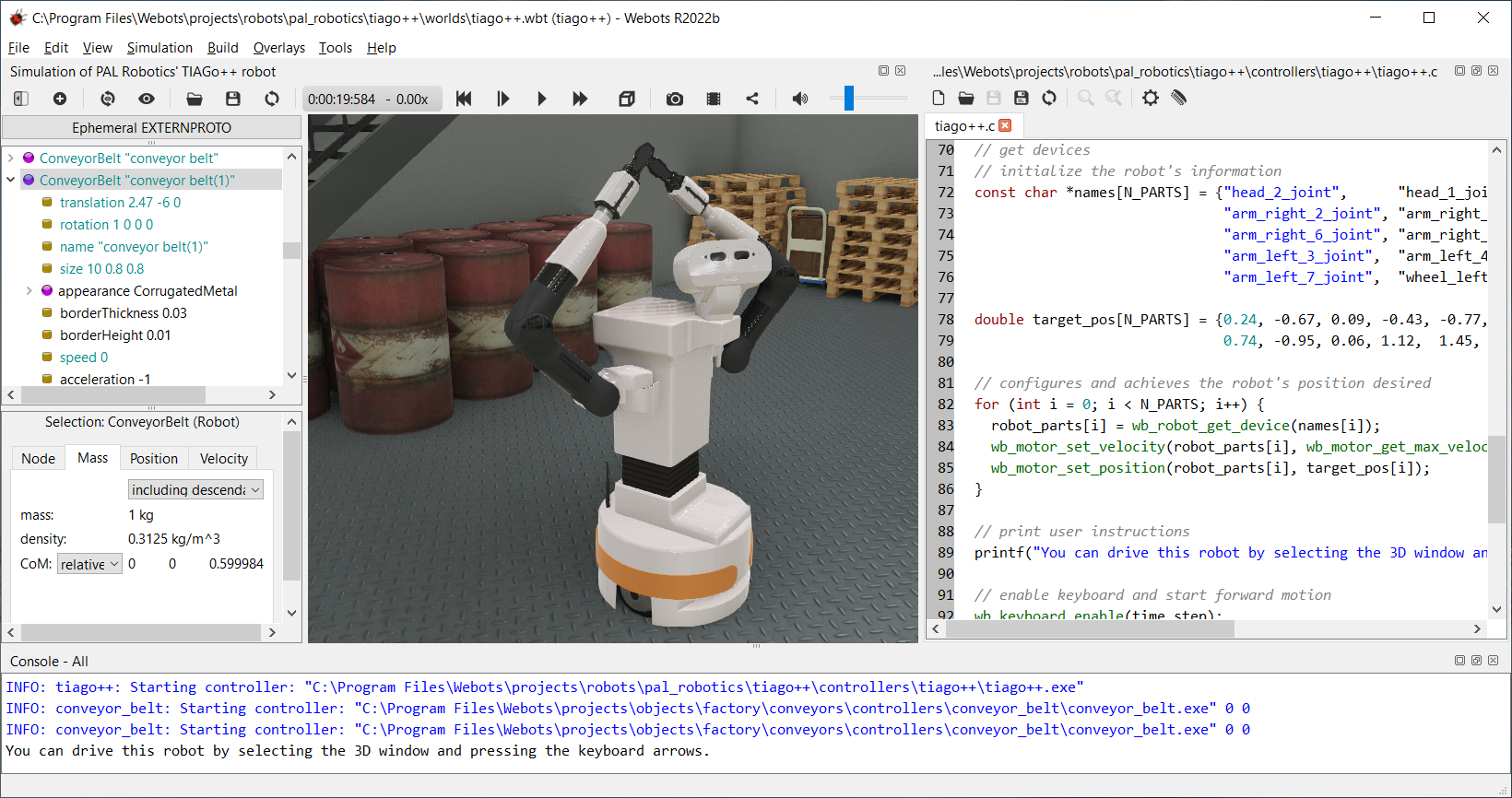
Webots提供了一个完整的开发环境,用于对机器人、车辆和机械系统进行建模、编程和仿真。它具有以下主要特点:
- 开源免费:采用Apache 2.0许可证,可以自由使用和修改
- 跨平台:支持Windows、Linux和macOS系统
- 功能强大:集成了物理引擎、3D渲染引擎等多种功能
- 易于使用:提供图形化界面和丰富的文档
- 扩展性强:支持多种编程语言和第三方工具集成
Webots的核心功能
1. 建模与仿真
Webots提供了丰富的资产库,包括各种机器人模型、传感器、执行器、物体和材质。用户可以轻松地创建复杂的仿真环境,包括:
- 轮式机器人
- 工业机械臂
- 足式机器人
- 模块化机器人
- 汽车
- 飞行器
- 水下机器人
- 航天器等
此外,Webots还支持导入CAD模型和OpenStreetMap地图,方便用户创建更加真实的仿真场景。
2. 编程与控制
Webots支持多种编程语言,包括:
- C/C++
- Python
- Java
- MATLAB
- ROS
用户可以使用这些语言编写机器人控制器,实现复杂的控制算法和人工智能模型。Webots提供了简单易用的API,涵盖了机器人编程的基本需求。
3. 可视化与分析
Webots具有强大的可视化功能,用户可以:
- 实时观察仿真过程
- 调整视角和摄像机参数
- 显示传感器数据和调试信息
- 录制仿真视频和动画
同时,Webots还提供了数据分析工具,帮助用户评估和优化机器人的性能。
Webots的应用领域
1. 工业应用
Webots在工业领域有广泛应用,例如:
- 工厂自动化系统设计
- 工业机器人编程与测试
- 生产线优化
- 自动驾驶车辆开发
2. 教育与研究
Webots是一个理想的教学和研究工具:
- 机器人学课程教学
- 人工智能算法研究
- 控制理论验证
- 多机器人协作研究
3. 创新与原型设计
Webots可以帮助创新者快速验证想法:
- 新型机器人概念设计
- 机器人硬件原型测试
- 控制算法快速迭代
Webots的社区与生态
Webots拥有活跃的开源社区,用户可以通过以下方式参与:
- GitHub: 贡献代码、报告问题
- Discord: 与其他用户交流讨论
- Stack Overflow: 提问和解答技术问题
此外,Webots还提供了在线仿真平台webots.cloud,用户可以直接在浏览器中运行Webots仿真。
Webots的未来展望
随着机器人技术和人工智能的快速发展,Webots作为一个开源平台,将继续evolve以满足不断变化的需求:
- 支持更多新兴的机器人技术
- 增强与深度学习框架的集成
- 提供更加真实的物理仿真
- 优化性能,支持大规模仿真
结语
Webots作为一款功能强大、易用性高的开源机器人仿真平台,为机器人开发者、研究人员和学生提供了宝贵的工具。无论是进行创新研究、工业应用还是教育培训,Webots都能满足各种需求。随着其持续发展和社区的不断壮大,Webots必将在推动机器人技术进步方面发挥更加重要的作用。
如果您对机器人仿真感兴趣,不妨立即下载Webots,开始您的机器人仿真之旅!
参考资料:











