
LaserMix: 半监督激光雷达语义分割的革新技术
在自动驾驶领域,准确的环境感知至关重要。作为关键传感器之一,激光雷达凭借其精确的3D测距能力,在环境感知中扮演着不可或缺的角色。然而,激光雷达数据的语义分割任务仍面临着巨大挑战,尤其是在标注数据有限的情况下。为了解决这一问题,来自南洋理工大学S-Lab的研究团队提出了一种名为LaserMix的创新半监督学习框架,专门针对激光雷达语义分割任务进行优化。
LaserMix的核心思想
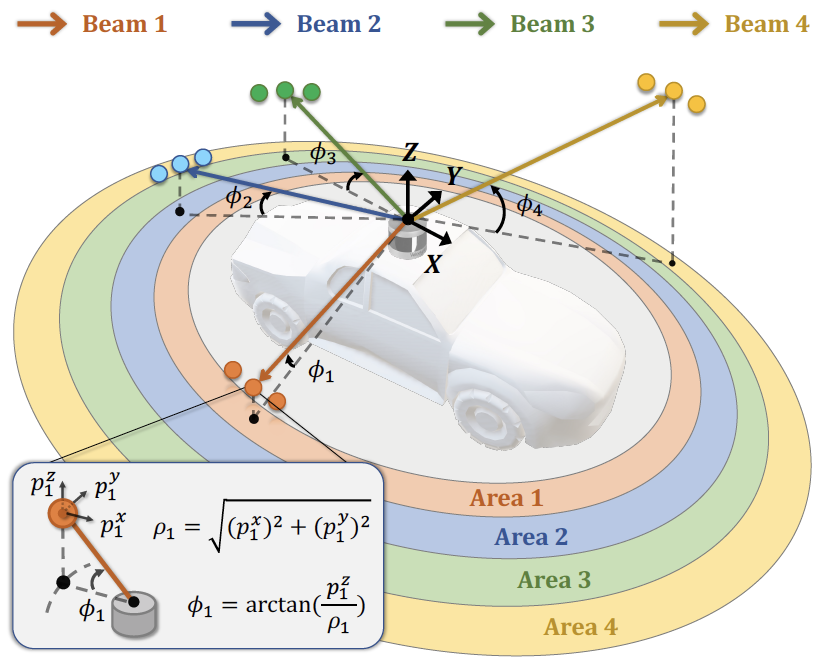
LaserMix的核心思想是利用驾驶场景中存在的强空间先验信息。研究人员注意到,在激光雷达扫描的过程中,相邻的激光束往往具有相似的语义信息。基于这一观察,LaserMix提出了一种新颖的数据增强策略 - 激光束混合(laser beam mixing)。
这种方法通过混合不同样本中的激光束来构建低变异区域。具体来说,它根据激光束的倾角将点云划分为不同的区域,然后在这些区域内进行混合。这种混合策略不仅保留了原始数据的空间结构,还能创造出新的、语义一致的合成样本。
一致性正则化
除了数据增强,LaserMix还引入了一种创新的一致性正则化方法。该方法鼓励分割模型在混合前后对同一区域做出一致的预测。这不仅提高了模型的鲁棒性,还能帮助模型学习到更加泛化的特征表示。
框架概览
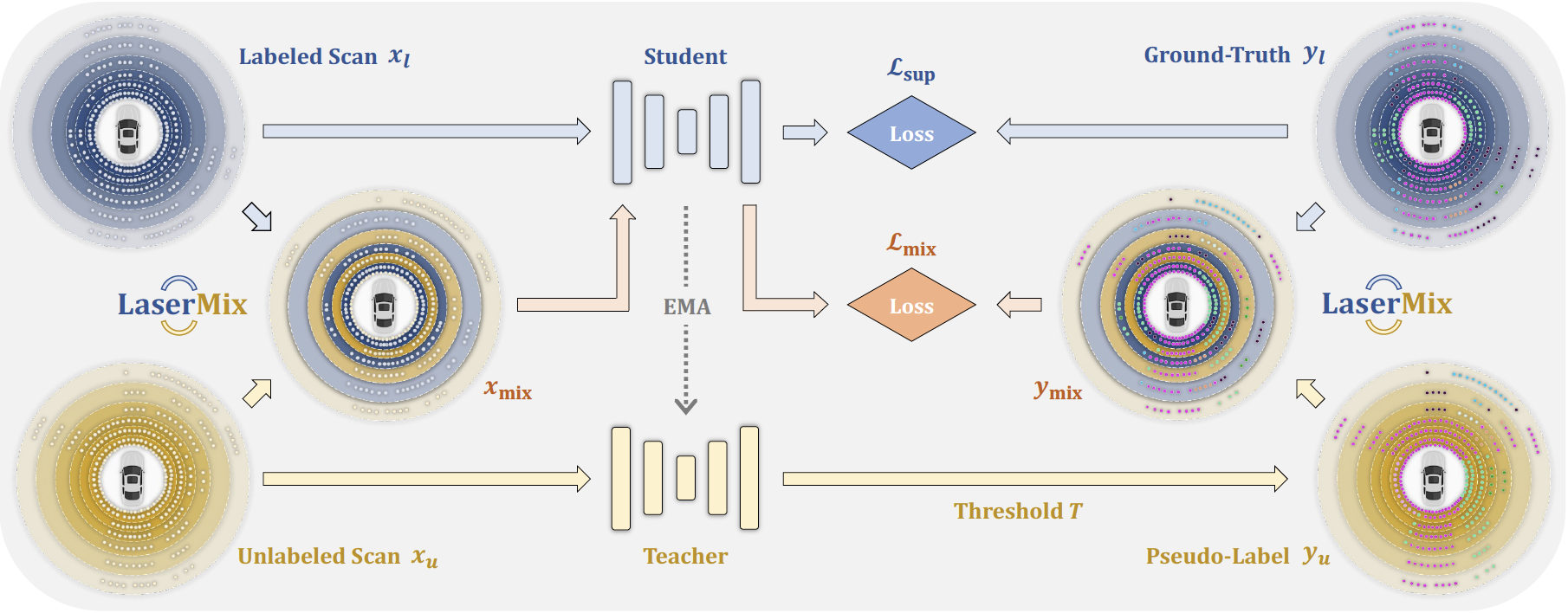
LaserMix的整体框架包括以下几个关键步骤:
- 数据准备: 将有标签和无标签的激光雷达数据输入模型。
- 激光束混合: 对输入数据进行混合,生成新的合成样本。
- 模型预测: 使用当前的分割模型对原始数据和混合后的数据进行预测。
- 损失计算: 计算有监督损失(对有标签数据)和一致性损失(对所有数据)。
- 模型更新: 根据计算得到的损失更新模型参数。
实验结果
研究团队在多个主流数据集上对LaserMix进行了全面的评估,包括nuScenes、SemanticKITTI和ScribbleKITTI。实验结果表明,LaserMix在各种标签比例下都取得了显著的性能提升。
以SemanticKITTI数据集为例,在仅使用1%标注数据的情况下,LaserMix将mIoU从36.2%提升到了43.4%,相比纯监督方法提高了7.2个百分点。即使在标签比例较高(50%)的情况下,LaserMix仍然能够带来4.2个百分点的提升。
这些结果充分证明了LaserMix在处理标签稀缺问题上的优越性。特别是在低标签比例的场景下,LaserMix的优势更加明显,这对于减少标注成本、提高数据利用效率具有重要意义。
可视化分析
为了更直观地展示LaserMix的效果,研究团队提供了一系列定性分析结果。通过对比纯监督方法和LaserMix的分割结果,可以清楚地看到LaserMix在细节处理和边界划分上的优势。
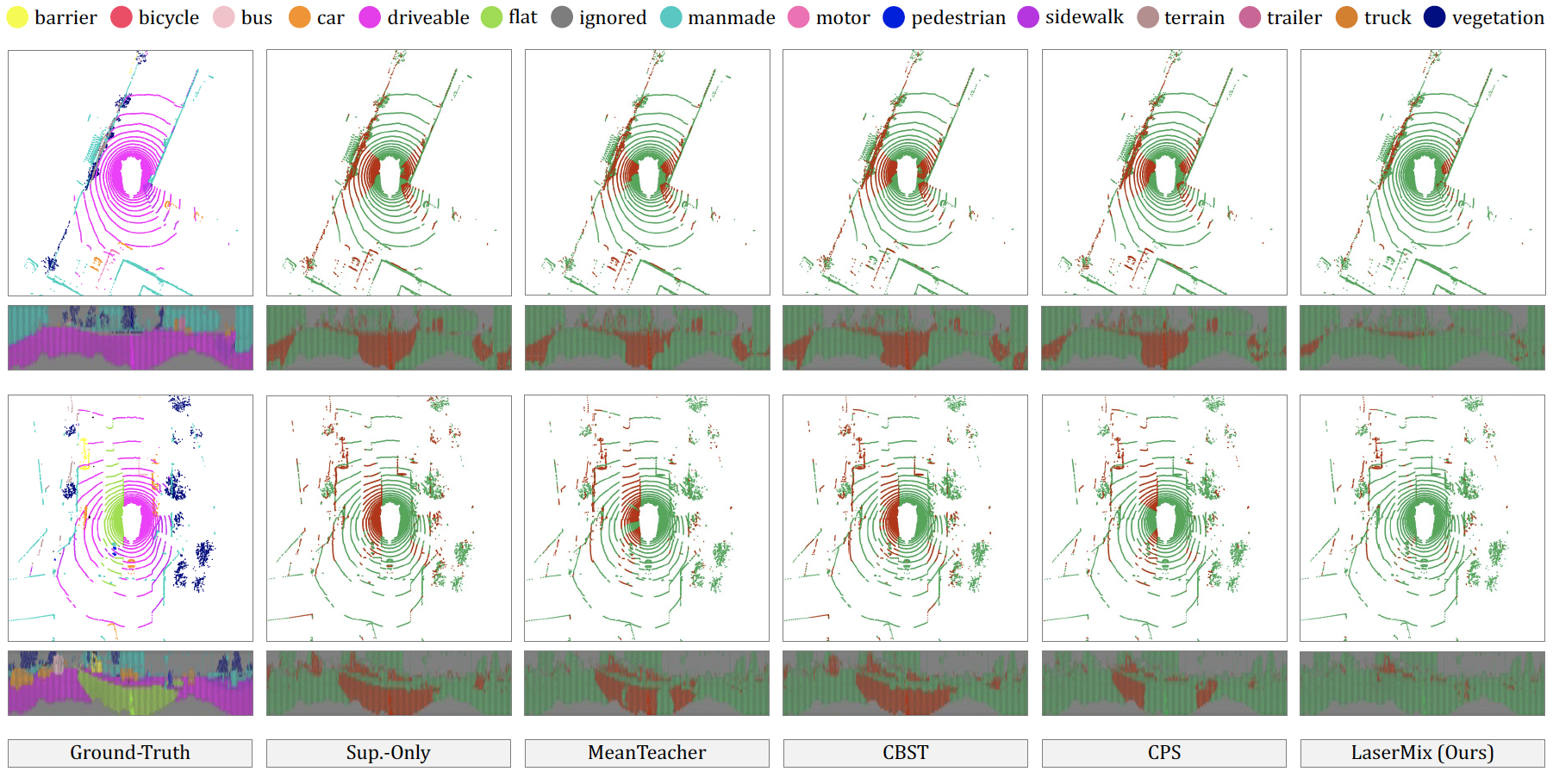
从上图可以看出,LaserMix在处理复杂场景时表现出色。例如,它能够更准确地识别和分割道路、建筑物和植被等不同类别的物体。这种改进不仅体现在整体准确率的提升上,更重要的是提高了模型在关键区域的分割精度,这对于自动驾驶系统的安全性和可靠性至关重要。
技术创新点
LaserMix的成功可以归因于以下几个关键的技术创新:
- 空间先验利用: 通过激光束混合策略,有效利用了激光雷达数据的空间结构信息。
- 低变异区域构建: 混合策略能够创造出语义一致的合成样本,增强了模型的泛化能力。
- 一致性正则化: 鼓励模型在原始数据和混合数据上做出一致预测,提高了模型的鲁棒性。
- 灵活的框架设计: LaserMix可以与多种主流的激光雷达分割模型兼容,具有良好的通用性。
应用前景
LaserMix的提出为半监督激光雷达语义分割开辟了新的研究方向。它不仅在学术界引起了广泛关注,也为工业界提供了一种有效的解决方案。在自动驾驶、机器人导航、智能交通等领域,LaserMix都有望发挥重要作用。
具体而言,LaserMix可以应用于以下场景:
- 自动驾驶感知系统: 提高车辆对周围环境的理解能力,特别是在复杂城市环境中。
- 智能交通管理: 协助交通监控系统更准确地识别和分类道路上的各种元素。
- 机器人导航: 增强室内外机器人的环境感知能力,提高导航精度。
- 3D场景重建: 在建筑、测绘等领域,提供更精确的场景语义信息。
未来展望
尽管LaserMix取得了显著成果,但研究团队认为仍有进一步改进的空间:
- 多模态融合: 探索将LaserMix与其他传感器数据(如相机图像)结合的可能性,以获得更全面的场景理解。
- 动态场景适应: 优化LaserMix以better处理动态物体和快速变化的场景。
- 实时性能优化: 提高算法的计算效率,使其能够在实时系统中应用。
- 更大规模数据集验证: 在更多样化、更大规模的数据集上验证LaserMix的有效性。
开源贡献
为了促进该领域的研究发展,LaserMix的源代码已在GitHub上开源。研究团队鼓励学术界和工业界的同仁基于此框架进行进一步的探索和改进。项目地址:https://github.com/ldkong1205/LaserMix
结语
LaserMix的提出为半监督激光雷达语义分割任务带来了新的突破。通过巧妙利用激光雷达数据的空间特性,LaserMix不仅提高了分割精度,还大大减少了对标注数据的依赖。这项技术的发展将为自动驾驶和机器人视觉等领域带来深远影响,推动环境感知技术向更高精度、更低成本的方向发展。
随着LaserMix的不断完善和广泛应用,我们有理由相信,更安全、更智能的自动驾驶系统将很快成为现实。LaserMix的成功也为其他计算机视觉任务的半监督学习提供了宝贵的经验,有望激发更多创新性的研究工作。未来,我们期待看到LaserMix在更多领域发挥其潜力,为人工智能的发展做出更大贡献。









