
 访问官网
访问官网 Github
Github 论文
论文

LaserMix:用于半监督激光雷达语义分割的方法
孔令栋,
任嘉伟,
潘亮,
刘子伟
南洋理工大学 S-Lab
简介
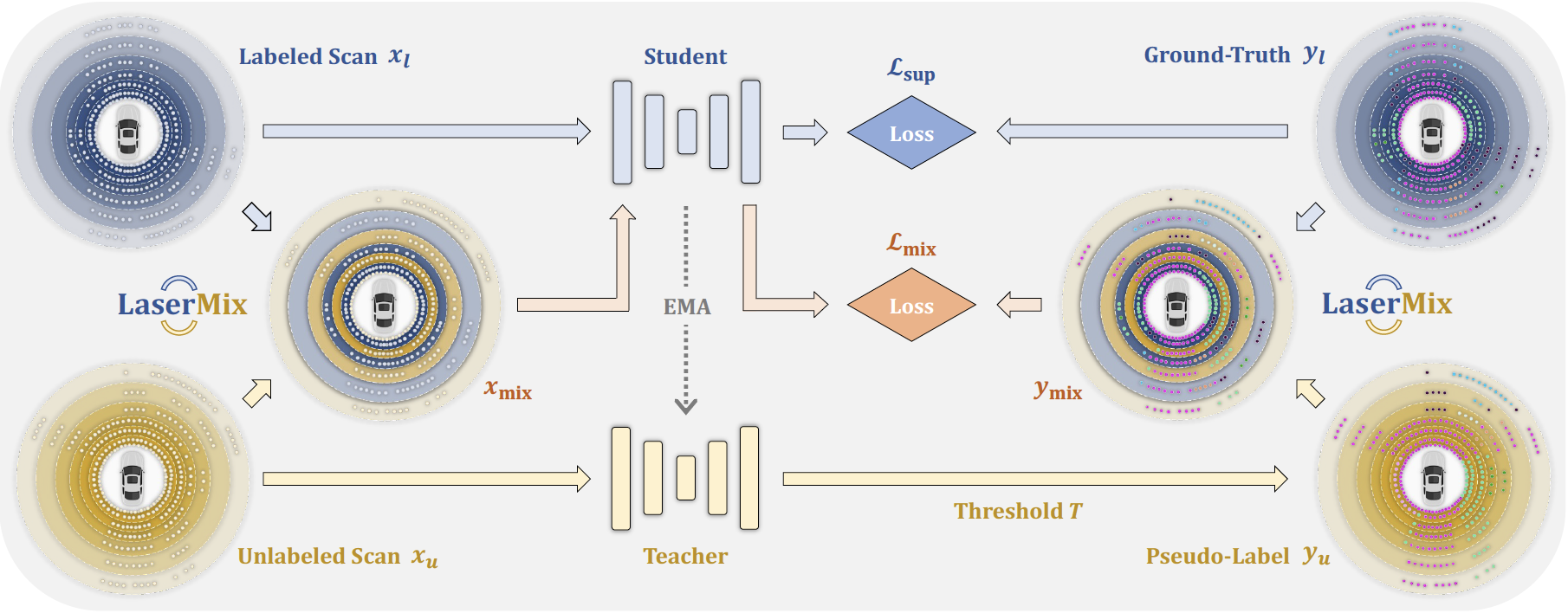
LaserMix是一个为激光雷达语义分割设计的半监督学习(SSL)框架。它利用驾驶场景的强空间先验,通过激光束混合构建低变化区域,并鼓励分割模型在混合前后做出自信和一致的预测。
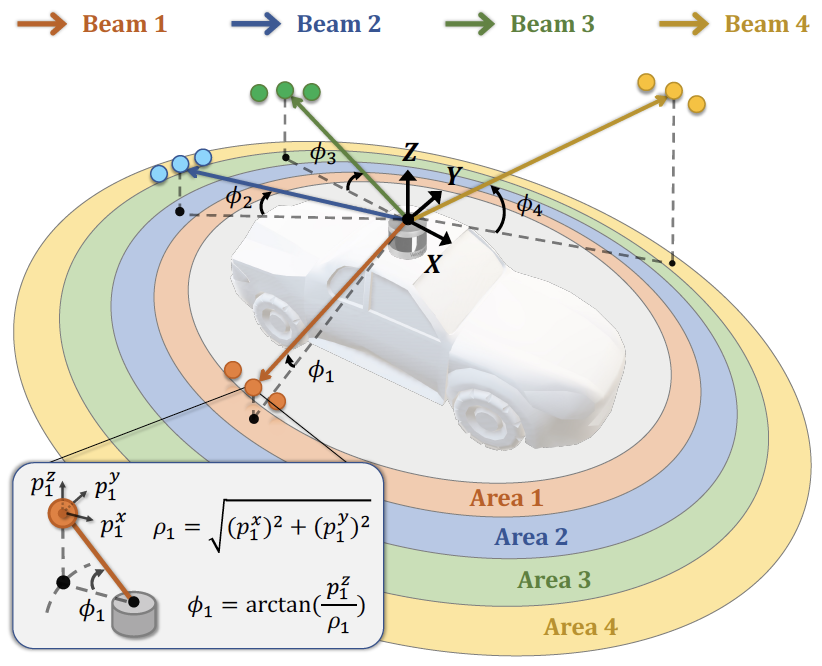
图. 基于倾角φ的激光束分区示意图。
访问我们的项目页面了解更多详情。:red_car:
更新
- [2024.05] - 我们改进的框架 LaserMix++ :rocket: 已在 arXiv 上发布。
- [2024.01] - 为 RoboDrive 挑战赛 定制的工具包已经发布。:hammer_and_wrench:
- [2023.12] - 我们正在 ICRA 2024 上举办 RoboDrive 挑战赛。:blue_car:
- [2023.12] - 推出 FRNet,这是一个高效且有效的实时 LiDAR 分割模型,在
SemanticKITTI和nuScenes上取得了promising的半监督学习结果。代码和检查点可供下载。 - [2023.03] - 想测试你的 LiDAR 语义分割模型的鲁棒性吗?查看我们最新的工作 :robot: Robo3D,这是一个综合套件,能够在我们新建立的数据集
SemanticKITTI-C、nuScenes-C和WOD-C上评估 3D 分割器的分布外鲁棒性。 - [2023.03] - LaserMix 被选为 CVPR 2023 的 :sparkles: 亮点论文 :sparkles:(被接收论文的前 10%)。
- [2023.02] - LaserMix 被 CVPR 2023 接收!:tada:
- [2023.02] - LaserMix 已集成到 MMDetection3D 代码库中!查看
dev-1.x分支中的这个 PR 了解更多详情。:beers: - [2023.01] - 根据建议,我们将在半监督 LiDAR 语义分割基准中建立一个序列轨道,考虑 LiDAR 数据收集的本质。结果将逐步更新在 RESULT.md 中。
- [2022.12] - 我们支持更广泛的 LiDAR 分割骨干网络,包括 RangeNet++、SalsaNext、FIDNet、CENet、MinkowskiUNet、Cylinder3D 和 SPVCNN,支持全监督和半监督设置。检查点将很快提供!
- [2022.12] - 基于空间先验的 SSL 推导可在此处获得。快来看看!:memo:
- [2022.08] - 根据 Paper-with-Code,LaserMix 在 nuScenes、SemanticKITTI 和 ScribbleKITTI 的半监督语义分割排行榜上均获得第一名。:bar_chart:
- [2022.08] - 我们提供了一个 视频演示,展示了在 SemanticKITTI 验证集上的视觉比较。快来看看!
- [2022.07] - 我们的论文已在 arXiv 上发布,点击这里查看。代码将很快提供!
大纲
安装
请参考 INSTALL.md 了解安装详情。
数据准备
请参考 DATA_PREPARE.md 了解准备 1nuScenes、2SemanticKITTI 和 3ScribbleKITTI 数据集的详细信息。
入门指南
请参考 GET_STARTED.md 了解更多关于这个代码库的使用方法。
视频演示



主要结果
框架概述
范围视图
| 方法 | nuScenes | SemanticKITTI | ScribbleKITTI | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1% | 10% | 20% | 50% | 1% | 10% | 20% | 50% | 1% | 10% | 20% | 50% | |
| 仅监督 | 38.3 | 57.5 | 62.7 | 67.6 | 36.2 | 52.2 | 55.9 | 57.2 | 33.1 | 47.7 | 49.9 | 52.5 |
| LaserMix | 49.5 | 68.2 | 70.6 | 73.0 | 43.4 | 58.8 | 59.4 | 61.4 | 38.3 | 54.4 | 55.6 | 58.7 |
| 提升 ↑ | +11.2 | +10.7 | +7.9 | +5.4 | +7.2 | +6.6 | +3.5 | +4.2 | +5.2 | +6.7 | +5.7 | +6.2 |
| LaserMix++ | ||||||||||||
| 提升 ↑ | ||||||||||||
体素
| 方法 | nuScenes | SemanticKITTI | ScribbleKITTI | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1% | 10% | 20% | 50% | 1% | 10% | 20% | 50% | 1% | 10% | 20% | 50% | |
| 仅监督 | 50.9 | 65.9 | 66.6 | 71.2 | 45.4 | 56.1 | 57.8 | 58.7 | 39.2 | 48.0 | 52.1 | 53.8 |
| LaserMix | 55.3 | 69.9 | 71.8 | 73.2 | 50.6 | 60.0 | 61.9 | 62.3 | 44.2 | 53.7 | 55.1 | 56.8 |
| 提升 ↑ | +4.4 | +4.0 | +5.2 | +2.0 | +5.2 | +3.9 | +4.1 | +3.6 | +5.0 | +5.7 | +3.0 | +3.0 |
| LaserMix++ | ||||||||||||
| 提升 ↑ | ||||||||||||
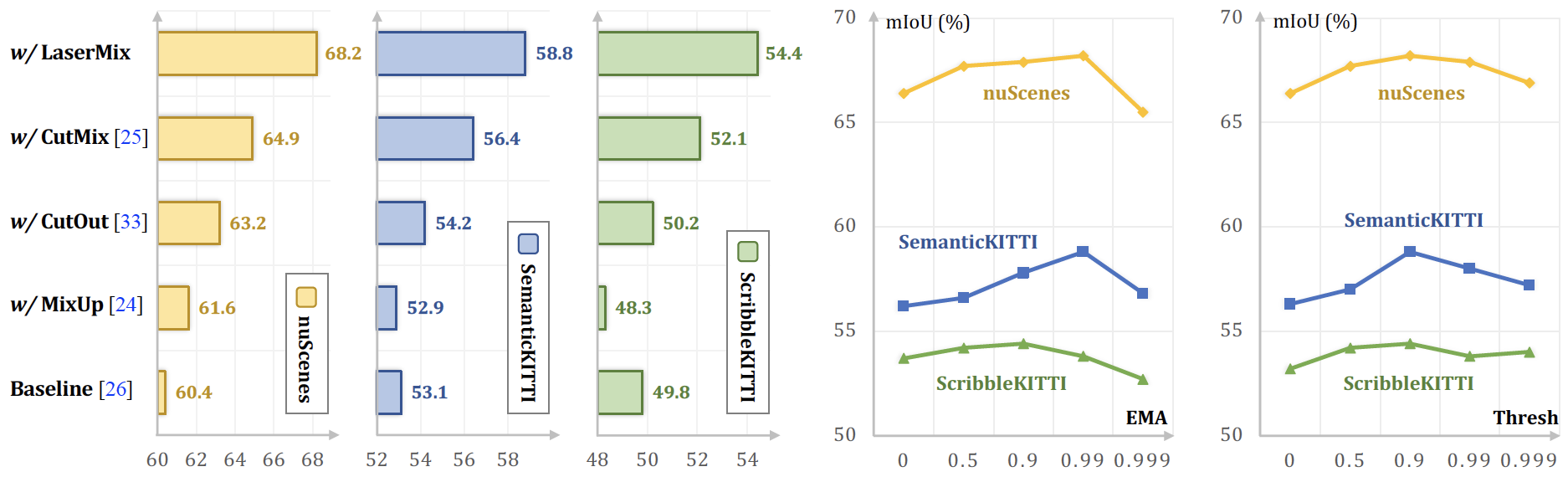
消融研究
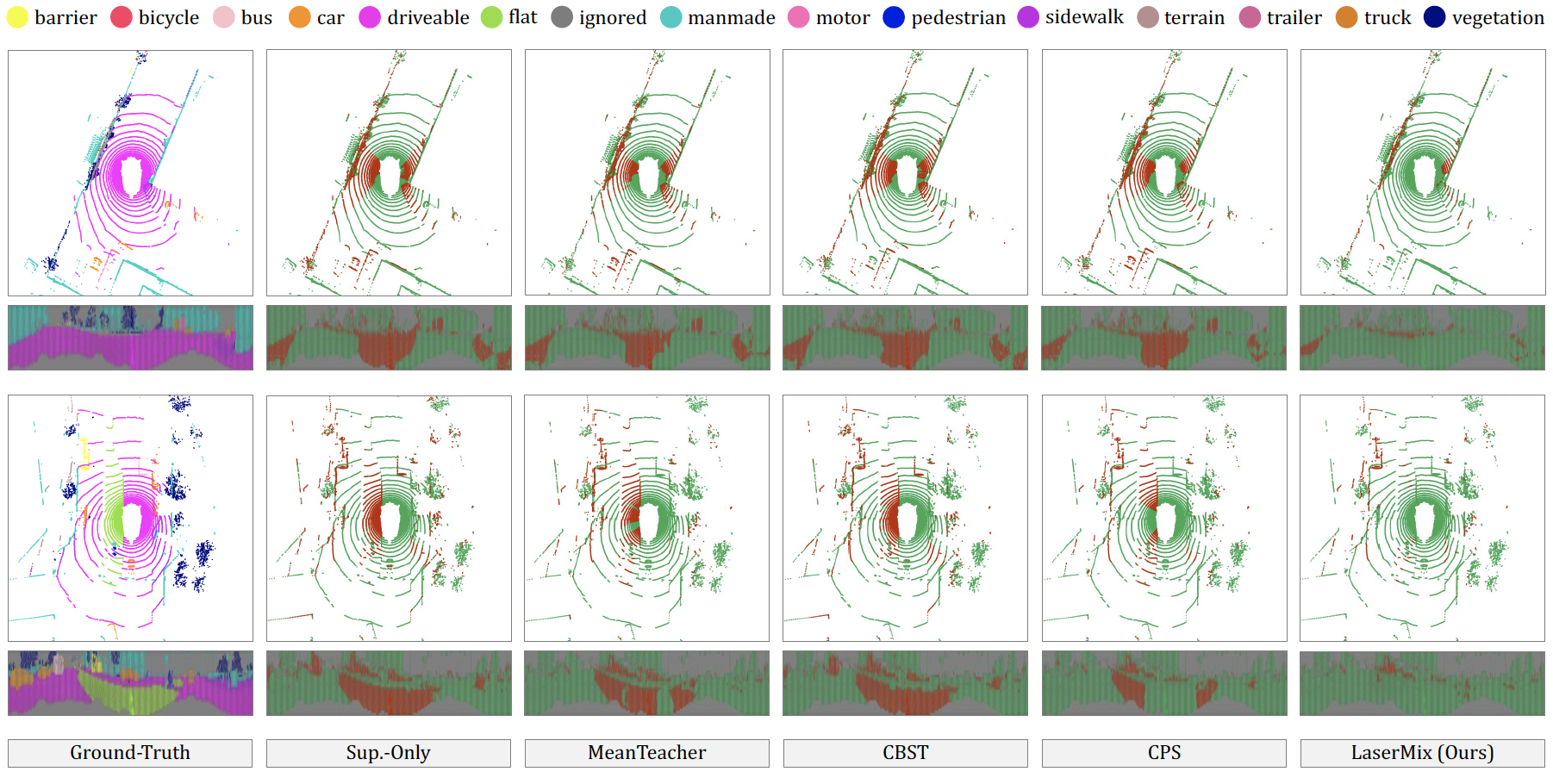
定性示例
检查点和更多结果
有关更多实验结果和预训练权重,请参阅 RESULT.md。
待办事项
- 初始发布。:rocket:
- 添加许可证。详情请参阅此处。
- 添加视频演示 :movie_camera:
- 添加安装详情。
- 添加数据准备详情。
- 添加评估详情。
- 添加训练详情。
引用
如果您觉得这项工作有帮助,请考虑引用我们的论文:
@inproceedings{kong2023lasermix,
title = {LaserMix for Semi-Supervised LiDAR Semantic Segmentation},
author = {Kong, Lingdong and Ren, Jiawei and Pan, Liang and Liu, Ziwei},
booktitle = {IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages = {21705--21715},
year = {2023},
}
许可证

本作品采用知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议进行许可。
致谢
本工作基于 MMDetection3D 代码库开发。
MMDetection3D是一个基于PyTorch的开源工具箱,旨在成为下一代通用3D感知平台。它是由MMLab开发的OpenMMLab项目的一部分。

在本工作过程中,我们感谢使用了以下公共资源:1nuScenes、2nuScenes-devkit、3SemanticKITTI、4SemanticKITTI-API、5ScribbleKITTI、6FIDNet、7CENet、8SPVNAS、9Cylinder3D、10TorchSemiSeg、11MixUp、12CutMix、13CutMix-Seg、14CBST、15MeanTeacher和16Cityscapes。
我们要特别感谢洪方舟富有洞察力的讨论和反馈。❤️











