
 访问官网
访问官网 Github
Github 文档
文档

我们选择在这十年里登月并完成其他事情,
不是因为它们容易,而是因为它们很难。
-- 约翰·F·肯尼迪,1962年
欢迎来到Apollo的GitHub页面!
Apollo是一个高性能、灵活的架构,可加速自动驾驶车辆的开发、测试和部署。
如需商业合作,请访问我们的网站。
目录
简介
Apollo加载了许多新模块和功能,但在您使用之前需要进行完美的校准和配置。请仔细查看前提条件和安装步骤,以确保您能够熟练地构建和启动Apollo。您也可以查看Apollo的架构概述,以更深入地了解Apollo的核心技术和平台。
前提条件
[2021年1月更新] Apollo平台(稳定版)现已升级,包含更新版本的软件包和库依赖:
- CUDA升级到11.1版本,以支持NVIDIA Ampere(30x0系列)GPU,NVIDIA驱动版本 >= 455.32
- LibTorch(CPU和GPU版本)相应升级到1.7.0版本。
我们预计这不会影响您当前的工作,但为了便于您迁移,您需要:
- 将主机上的NVIDIA驱动更新到 >= 455.32版本。 (网页链接)
- 拉取最新代码,重启并登录Apollo开发容器后运行以下命令:
# 删除之前构建的Bazel输出
rm -rf /apollo/.cache/{bazel,build,repos}
# 重新配置bazelrc
./apollo.sh config --noninteractive
-
配备线控系统的车辆,包括但不限于线控刹车、线控转向、线控油门和线控换挡(Apollo目前在林肯MKZ上进行测试)
-
至少配备8核处理器和16GB内存的机器
-
强烈推荐使用NVIDIA Turing GPU / AMD GFX9/RDNA/CDNA GPU
-
Ubuntu 18.04
-
Docker-CE 19.03及以上版本(官方文档)
-
NVIDIA Container Toolkit(官方文档)
请注意,建议您按以下顺序安装Apollo版本:1.0 -> 您想测试的任何版本。这样建议的原因是,您需要确认各个硬件组件和模块是否正常工作,并在进入更高级和功能更强大的版本之前通过各种版本测试用例,以确保您自身和周围人员的安全。
各个版本:
以下图表突出显示了每个Apollo版本的范围和特点:

Apollo 1.0,也称为自动GPS航点跟随,适用于封闭场地,如测试跑道或停车场。这个安装过程对确保Apollo与您的车辆完美配合至关重要。下图列出了Apollo 1.0中的各个模块。
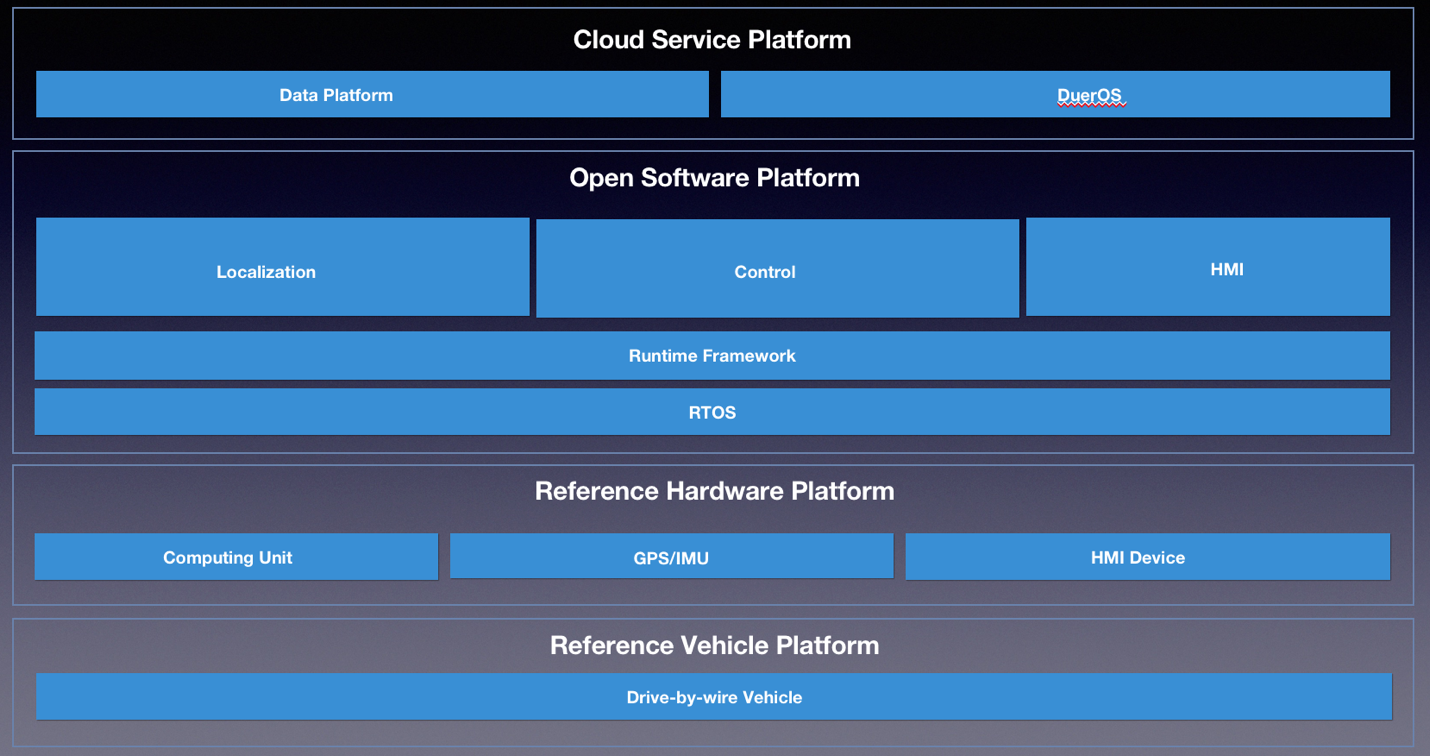
Apollo 1.5用于固定车道巡航。通过增加激光雷达,使用这个版本的车辆现在可以更好地感知周围环境,更准确地定位当前位置,并为更安全的车道行驶规划轨迹。请注意,黄色高亮的模块是1.5版本的新增或升级部分。
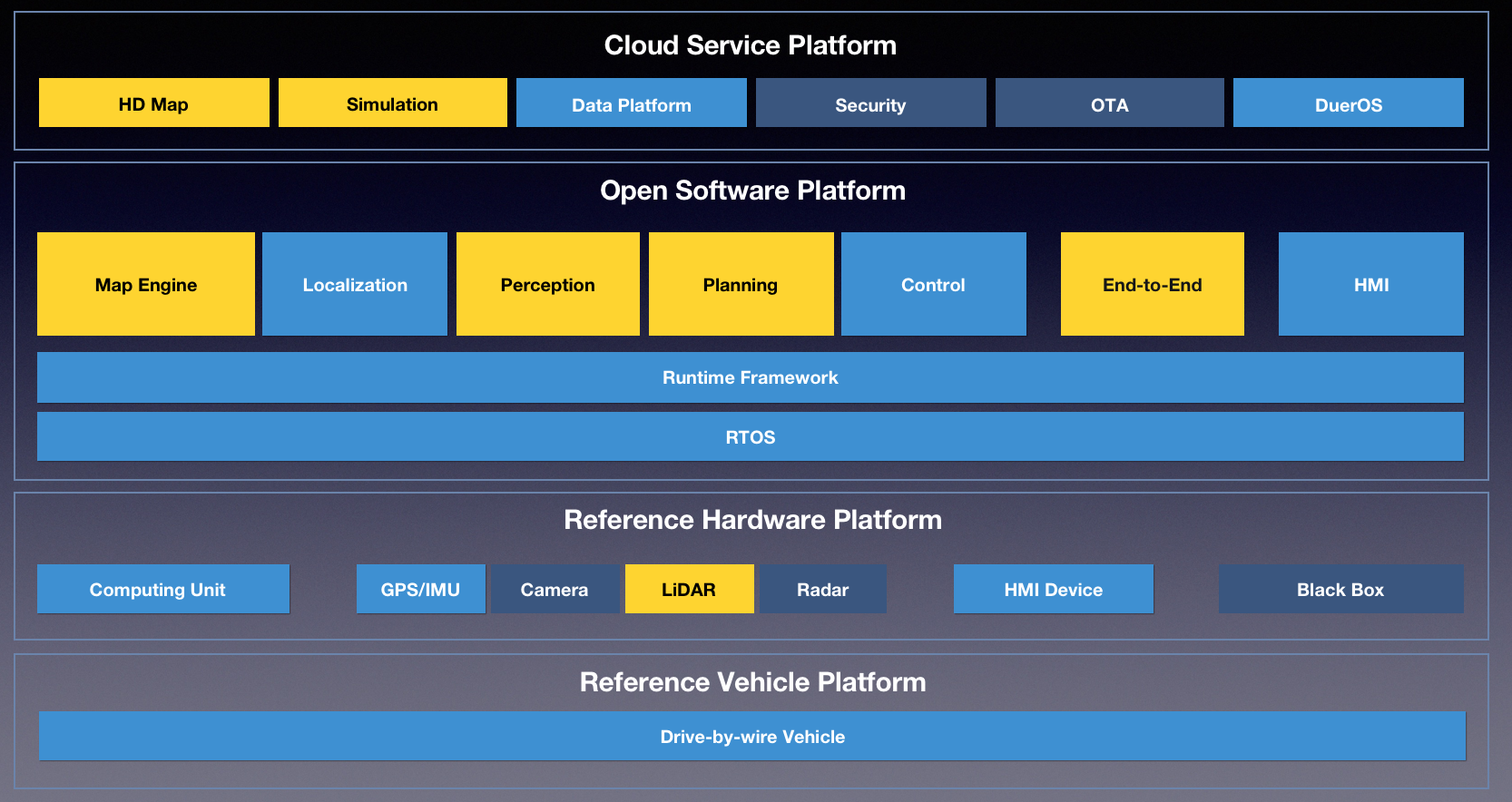
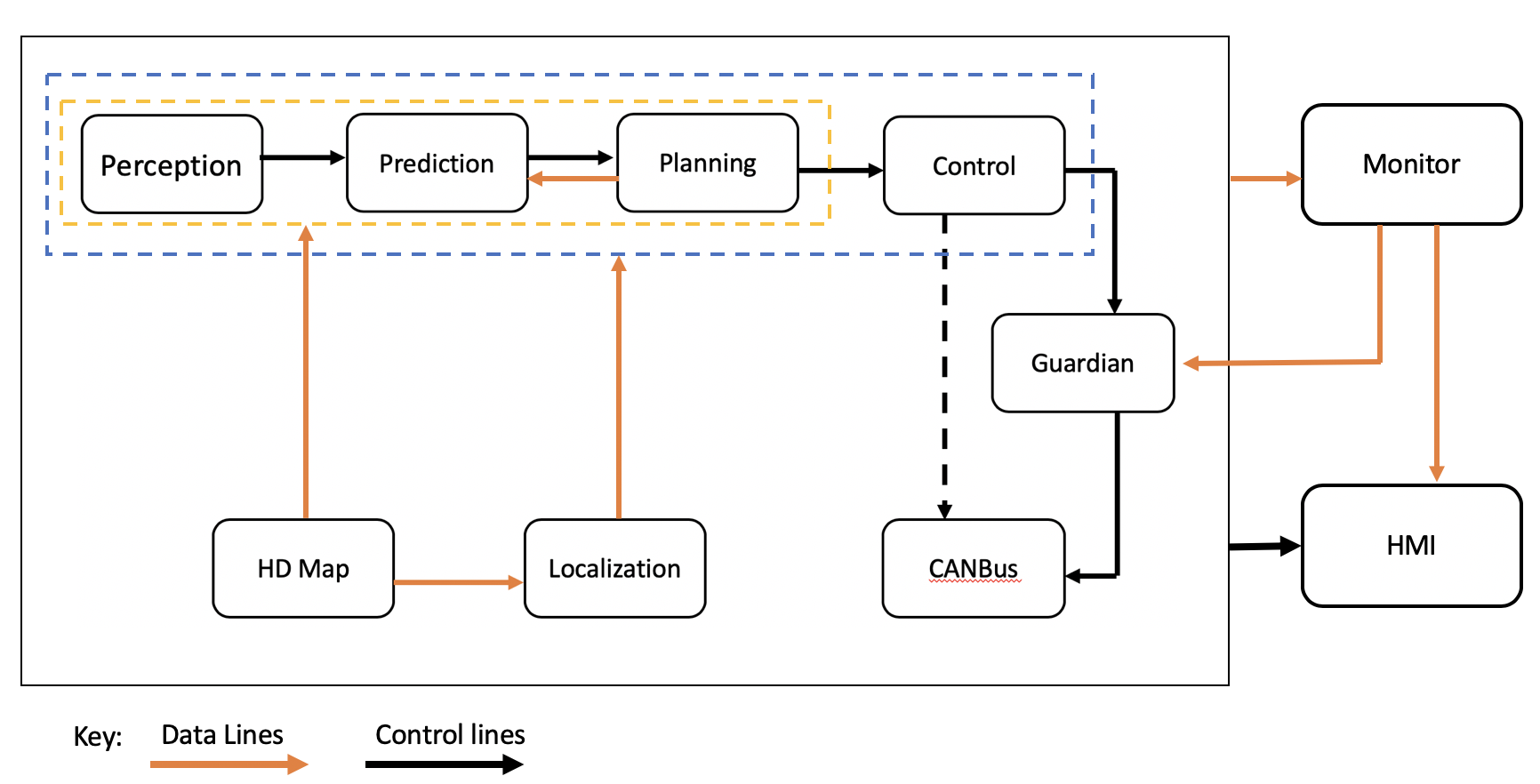
Apollo 2.0: Apollo 2.0支持车辆在简单的城市道路上自主驾驶。车辆能够安全地在道路上巡航,避免与障碍物发生碰撞,在交通信号灯处停车,并在需要时变换车道以到达目的地。请注意,红色高亮的模块是2.0版本的新增或升级部分。
[图片]
Apollo 2.5:
Apollo 2.5允许车辆在有地理围栏的高速公路上自主行驶,使用摄像头进行障碍物检测。车辆能够保持车道控制、巡航并避免与前方车辆发生碰撞。
请注意,如果您需要测试Apollo 2.5,出于安全考虑,请寻求Apollo工程团队的帮助。您的安全是我们的首要任务,我们希望确保Apollo 2.5在您上路之前已正确集成到您的车辆中。
[图片]
Apollo 3.0:
Apollo 3.0的主要重点是为开发者提供一个在封闭场地低速环境中构建的平台。车辆能够保持车道控制、巡航并避免与前方车辆发生碰撞。
[图片]
Apollo 3.5:
Apollo 3.5能够在复杂的驾驶场景中导航,如住宅区和市中心地区。车辆现在具有360度视野,同时升级了感知算法以应对城市道路的变化条件,使车辆更加安全和警觉。基于场景的规划可以在复杂场景中导航,包括住宅区常见的无保护转弯和狭窄街道,以及设有停车标志的道路。
[图片]
Apollo 5.0:
Apollo 5.0致力于支持地理围栏自动驾驶的批量生产。车辆现在具有360度视野,同时升级了感知深度学习模型,以应对复杂道路场景的变化条件,使车辆更加安全和警觉。基于场景的规划已得到增强,以支持额外的场景,如路边停车和穿过无信号灯路口。
[图片]
Apollo 5.5:
Apollo 5.5通过引入路缘到路缘的驾驶支持,增强了先前Apollo版本在复杂城市道路上的自主驾驶能力。有了这个新增功能,Apollo现在更接近完全自主的城市道路驾驶。车辆具有完整的360度视野,同时升级了感知深度学习模型和全新的预测模型,以应对复杂道路和路口场景的变化条件,使车辆更加安全和警觉。
[图片]
Apollo 6.0:
Apollo 6.0整合了新的深度学习模型,以增强某些Apollo模块的功能。该版本与新增的数据流水线服务无缝协作,更好地服务于Apollo开发者。Apollo 6.0也是首个集成某些功能的版本,展示了我们对无人驾驶技术持续探索和实验的努力。
[图片]
Apollo 7.0:
Apollo 7.0整合了3个全新的深度学习模型,以增强Apollo感知和预测模块的功能。该版本引入了Apollo Studio,结合数据流水线,为Apollo开发者提供一站式在线开发平台。Apollo 7.0还发布了基于先前模拟服务的PnC强化学习模型训练和模拟评估服务。
[图片]
Apollo 8.0:
Apollo 8.0致力于为自动驾驶开发者提供可扩展的软件框架和完整的开发周期。Apollo 8.0引入了易于重用的"包"来组织软件模块。Apollo 8.0通过结合模型训练服务、模型部署工具和端到端可视化验证工具,集成了感知开发的整个过程。另外3个新的深度学习模型被整合到Apollo 8.0的感知模块中。模拟服务通过在Dreamview中集成本地模拟器进行了升级,为PnC开发者提供强大的调试工具。
[图片] Apollo 9.0:
Apollo开源平台9.0版本进一步聚焦于提升开发和调试体验,致力于为自动驾驶开发者提供统一的开发工具平台和易于扩展的PnC和感知软件框架接口。新版本基于包管理重塑了PnC和感知扩展开发方式,根据业务逻辑优化了组件拆分和配置管理,简化了调用流程。除了组件扩展方式外,还新增了更轻量级的插件扩展方式,简化了扩展流程。新版本引入了全新的开发者工具Dreamview Plus,引入了便于多场景使用的模式,可自定义面板布局的可视化,以及提供更丰富开发资源的资源中心。此外,新版本中的LiDAR和摄像头检测模型已经升级,提升了检测效果,并开放了增量训练方法,方便扩展。同时,增加了对4D毫米波雷达的支持。最后,新版本适配了ARM架构,支持在Orin上编译运行,为开发者提供了更多设备选择。

架构
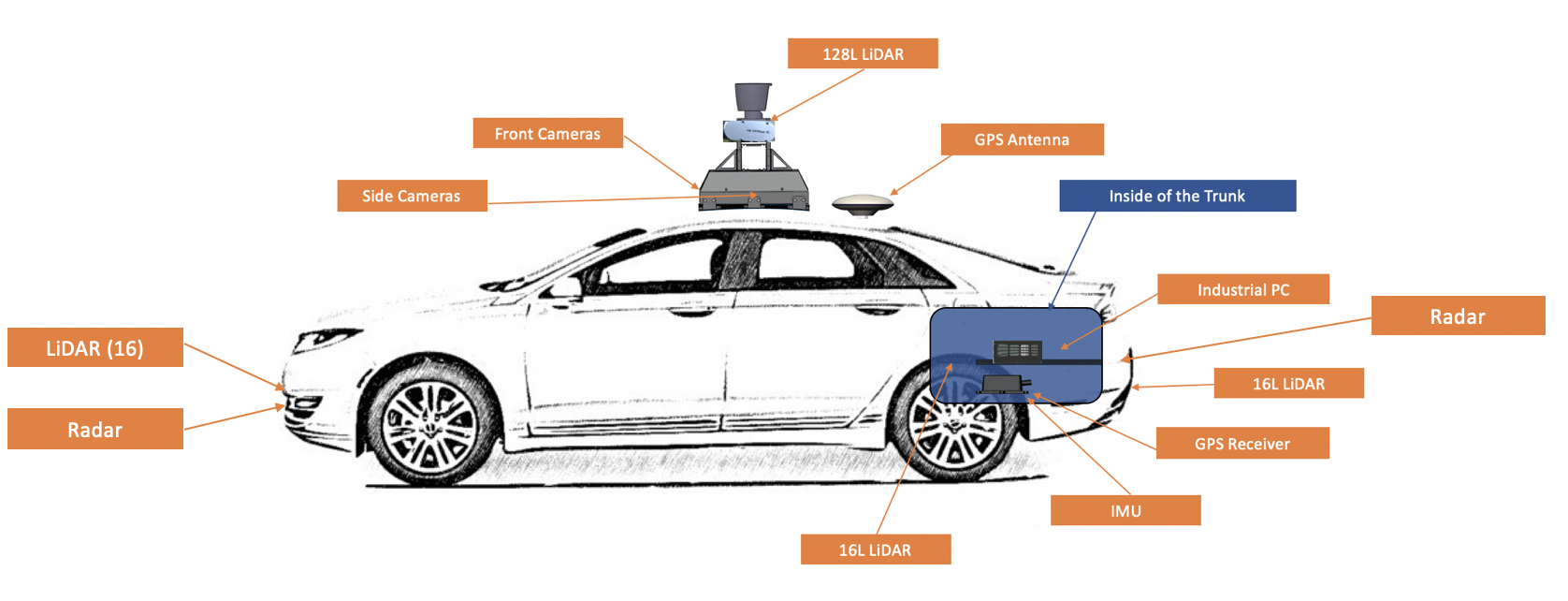
- 硬件/车辆概览
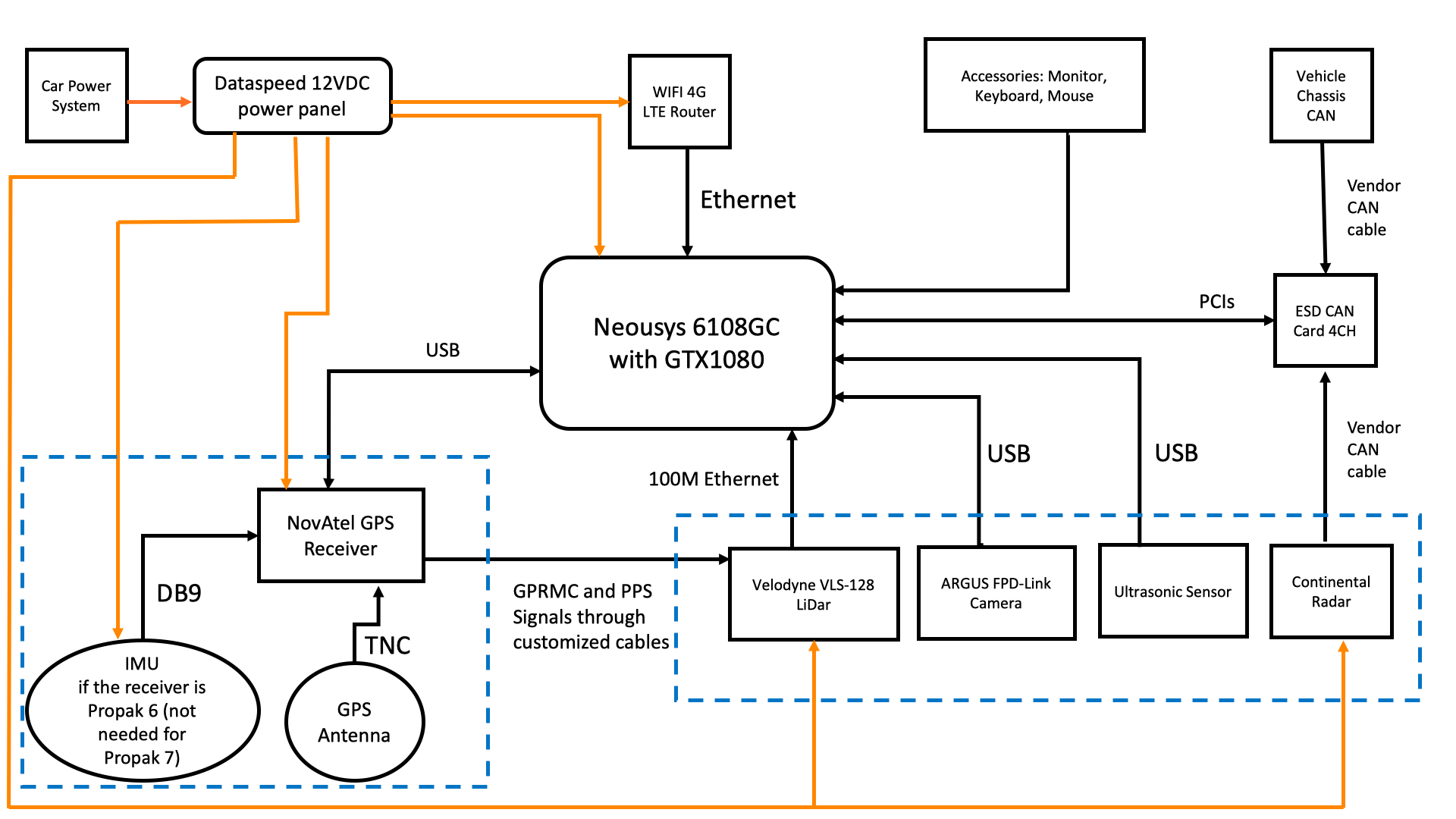
- 硬件连接概览
- 软件概览
安装
恭喜!您已成功构建了无硬件的Apollo。如果您确实有特定版本的车辆和硬件设置,请选择最适合您设置的快速入门指南:
快速入门:
文档
问题
欢迎您在GitHub Issues上提交问题和错误报告。
版权和许可
Apollo根据Apache-2.0许可证提供。
免责声明
Apollo开源平台仅包含模型、算法和流程的源代码,在商业化和产品化部署时将与网络安全防御策略相结合。
请参阅Apollo官方网站上的Apollo免责声明。
与我们联系
- 对我们的GitHub页面有建议?
- YouTube
- 博客
- 新闻订阅
- 对我们的交钥匙解决方案感兴趣或想与我们合作?请发邮件至:apollopartner@baidu.com











