
 访问官网
访问官网 Github
Github 论文
论文GPU 难题
- 作者:Sasha Rush - srush_nlp
GPU 架构对机器学习至关重要,而且似乎每天都变得更加重要。然而,你可以成为机器学习专家而不需要接触 GPU 代码。通过抽象层面来获得直觉是很困难的。
这个笔记本试图以一种完全交互的方式教授初学者 GPU 编程。它不是提供概念性的文字说明,而是直接让你编写和构建 GPU 内核。这些练习使用 NUMBA,它可以将 Python 代码直接映射到 CUDA 内核。它看起来像 Python,但基本上与编写底层 CUDA 代码相同。 我认为你可以在几个小时内从基础知识入手,理解当今 99% 深度学习背后的实际算法。如果你想阅读手册,可以在这里找到:
我建议在 Colab 中完成这些练习,因为它很容易上手。请确保创建自己的副本,在设置中开启 GPU 模式(运行时 / 更改运行时类型,然后将硬件加速器设置为GPU),然后开始编码。

(如果你喜欢这种类型的难题,也可以看看我的 Tensor 难题,适用于 PyTorch。)
!pip install -qqq git+https://github.com/danoneata/chalk@srush-patch-1
!wget -q https://github.com/srush/GPU-Puzzles/raw/main/robot.png https://github.com/srush/GPU-Puzzles/raw/main/lib.py
import numba
import numpy as np
import warnings
from lib import CudaProblem, Coord
warnings.filterwarnings(
action="ignore", category=numba.NumbaPerformanceWarning, module="numba"
)
难题 1:映射
实现一个"内核"(GPU 函数),将向量 a 的每个位置加 10,并将结果存储在向量 out 中。每个位置使用 1 个线程。
警告 这段代码看起来像 Python,但实际上是 CUDA!你不能使用标准的 Python 工具,如列表推导式,也不能获取 Numpy 属性,如形状或大小(如果你需要大小,它会作为参数给出)。 这些难题只需要进行简单的操作,基本上是 +、*、简单的数组索引、for 循环和 if 语句。 你可以使用局部变量。 如果你遇到错误,可能是因为你做了一些复杂的操作 :)。
提示:把函数 call 看作是为每个线程运行一次。
唯一的区别是每次 cuda.threadIdx.x 都会改变。
def map_spec(a):
return a + 10
def map_test(cuda):
def call(out, a) -> None:
local_i = cuda.threadIdx.x
# 在此填写代码(大约 1 行)
return call
SIZE = 4
out = np.zeros((SIZE,))
a = np.arange(SIZE)
problem = CudaProblem(
"Map", map_test, [a], out, threadsperblock=Coord(SIZE, 1), spec=map_spec
)
problem.show()
# 映射
每线程最高分数:
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果:[0. 0. 0. 0.]
预期结果:[10 11 12 13]
难题 2 - 压缩
实现一个内核,将 a 和 b 的每个位置相加,并将结果存储在 out 中。
每个位置使用 1 个线程。
def zip_spec(a, b):
return a + b
def zip_test(cuda):
def call(out, a, b) -> None:
local_i = cuda.threadIdx.x
# 在此填写代码(大约 1 行)
return call
SIZE = 4
out = np.zeros((SIZE,))
a = np.arange(SIZE)
b = np.arange(SIZE)
problem = CudaProblem(
"Zip", zip_test, [a, b], out, threadsperblock=Coord(SIZE, 1), spec=zip_spec
)
problem.show()
# 压缩
每线程最高分数:
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果:[0. 0. 0. 0.]
预期结果:[0 2 4 6]
难题 3 - 保护
实现一个内核,将 a 的每个位置加 10,并将结果存储在 out 中。
线程数量多于位置数量。
def map_guard_test(cuda):
def call(out, a, size) -> None:
local_i = cuda.threadIdx.x
# 在此填写代码(大约 2 行)
return call
SIZE = 4
out = np.zeros((SIZE,))
a = np.arange(SIZE)
problem = CudaProblem(
"Guard",
map_guard_test,
[a],
out,
[SIZE],
threadsperblock=Coord(8, 1),
spec=map_spec,
)
problem.show()
# 保护
每线程最高分数:
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果:[0. 0. 0. 0.]
预期结果:[10 11 12 13]
难题 4 - 2D 映射
实现一个内核,将 a 的每个位置加 10,并将结果存储在 out 中。
输入 a 是二维的且为正方形。线程数量多于位置数量。
def map_2D_test(cuda):
def call(out, a, size) -> None:
local_i = cuda.threadIdx.x
local_j = cuda.threadIdx.y
# 在此填写代码(大约 2 行)
return call
SIZE = 2
out = np.zeros((SIZE, SIZE))
a = np.arange(SIZE * SIZE).reshape((SIZE, SIZE))
problem = CudaProblem(
"Map 2D", map_2D_test, [a], out, [SIZE], threadsperblock=Coord(3, 3), spec=map_spec
)
problem.show()
# 2D 映射
每线程最高分数:
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果:[[0. 0.]
[0. 0.]]
预期结果:[[10 11]
[12 13]]
难题 5 - 广播
实现一个内核,将 a 和 b 相加,并将结果存储在 out 中。
输入 a 和 b 是向量。线程数量多于位置数量。
def broadcast_test(cuda):
def call(out, a, b, size) -> None:
local_i = cuda.threadIdx.x
local_j = cuda.threadIdx.y
# 在此填写代码(大约 2 行)
return call
SIZE = 2
out = np.zeros((SIZE, SIZE))
a = np.arange(SIZE).reshape(SIZE, 1)
b = np.arange(SIZE).reshape(1, SIZE)
problem = CudaProblem(
"Broadcast",
broadcast_test,
[a, b],
out,
[SIZE],
threadsperblock=Coord(3, 3),
spec=zip_spec,
)
problem.show()
广播
分数(每线程最大值): | 全局读取 | 全局写入 | 共享读取 | 共享写入 | | 0 | 0 | 0 | 0 |

problem.check()
测试失败。 你的结果: [[0. 0.] [0. 0.]] 规范结果: [[0 1] [1 2]]
谜题 6 - 块
实现一个内核,将 a 的每个位置加 10 并存储在 out 中。
每个块的线程数少于 a 的大小。
提示: 一个块是一组线程。每个块的线程数是有限的,但我们可以有很多不同的块。变量 cuda.blockIdx 告诉我们当前在哪个块中。
def map_block_test(cuda):
def call(out, a, size) -> None:
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
# 在此填写代码(大约2行)
return call
SIZE = 9
out = np.zeros((SIZE,))
a = np.arange(SIZE)
problem = CudaProblem(
"Blocks",
map_block_test,
[a],
out,
[SIZE],
threadsperblock=Coord(4, 1),
blockspergrid=Coord(3, 1),
spec=map_spec,
)
problem.show()
块
分数(每线程最大值): | 全局读取 | 全局写入 | 共享读取 | 共享写入 | | 0 | 0 | 0 | 0 |

problem.check()
测试失败。 你的结果: [0. 0. 0. 0. 0. 0. 0. 0. 0.] 规范结果: [10 11 12 13 14 15 16 17 18]
谜题 7 - 2D块
在2D中实现相同的内核。在两个方向上,每个块的线程数都少于 a 的大小。
def map_block2D_test(cuda):
def call(out, a, size) -> None:
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
# 在此填写代码(大约4行)
return call
SIZE = 5
out = np.zeros((SIZE, SIZE))
a = np.ones((SIZE, SIZE))
problem = CudaProblem(
"Blocks 2D",
map_block2D_test,
[a],
out,
[SIZE],
threadsperblock=Coord(3, 3),
blockspergrid=Coord(2, 2),
spec=map_spec,
)
problem.show()
2D块
分数(每线程最大值): | 全局读取 | 全局写入 | 共享读取 | 共享写入 | | 0 | 0 | 0 | 0 |

problem.check()
测试失败。 你的结果: [[0. 0. 0. 0. 0.] [0. 0. 0. 0. 0.] [0. 0. 0. 0. 0.] [0. 0. 0. 0. 0.] [0. 0. 0. 0. 0.]] 规范结果: [[11. 11. 11. 11. 11.] [11. 11. 11. 11. 11.] [11. 11. 11. 11. 11.] [11. 11. 11. 11. 11.] [11. 11. 11. 11. 11.]]
谜题 8 - 共享
实现一个内核,将 a 的每个位置加 10 并存储在 out 中。
每个块的线程数少于 a 的大小。
警告: 每个块只能有固定数量的共享内存,该块中的线程可以读写。这需要是一个字面的 Python 常量,而不是变量。写入共享内存后,你需要调用 cuda.syncthreads 以确保线程不会交叉。
(这个例子实际上并不需要共享内存或 syncthreads,但它是一个演示。)
TPB = 4
def shared_test(cuda):
def call(out, a, size) -> None:
shared = cuda.shared.array(TPB, numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
if i < size:
shared[local_i] = a[i]
cuda.syncthreads()
# 在此填写代码(大约2行)
return call
SIZE = 8
out = np.zeros(SIZE)
a = np.ones(SIZE)
problem = CudaProblem(
"Shared",
shared_test,
[a],
out,
[SIZE],
threadsperblock=Coord(TPB, 1),
blockspergrid=Coord(2, 1),
spec=map_spec,
)
problem.show()
共享
分数(每线程最大值): | 全局读取 | 全局写入 | 共享读取 | 共享写入 | | 1 | 0 | 0 | 1 |

problem.check()
测试失败。 你的结果: [0. 0. 0. 0. 0. 0. 0. 0.] 规范结果: [11. 11. 11. 11. 11. 11. 11. 11.]
谜题 9 - 池化
实现一个内核,将 a 的最后3个位置相加并存储在 out 中。
每个位置有1个线程。每个线程只需要1次全局读取和1次全局写入。
提示: 记得要小心同步。
def pool_spec(a):
out = np.zeros(*a.shape)
for i in range(a.shape[0]):
out[i] = a[max(i - 2, 0) : i + 1].sum()
return out
TPB = 8
def pool_test(cuda):
def call(out, a, size) -> None:
shared = cuda.shared.array(TPB, numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
# 在此填写代码(大约8行)
return call
SIZE = 8
out = np.zeros(SIZE)
a = np.arange(SIZE)
problem = CudaProblem(
"Pooling",
pool_test,
[a],
out,
[SIZE],
threadsperblock=Coord(TPB, 1),
blockspergrid=Coord(1, 1),
spec=pool_spec,
)
problem.show()
池化
分数(每线程最大值): | 全局读取 | 全局写入 | 共享读取 | 共享写入 | | 0 | 0 | 0 | 0 |

problem.check()
测试失败。 你的结果: [0. 0. 0. 0. 0. 0. 0. 0.] 规范结果: [ 0. 1. 3. 6. 9. 12. 15. 18.]
谜题 10 - 点积
实现一个内核,计算 a 和 b 的点积并将结果存储在 out 中。
每个位置有1个线程。每个线程只需要2次全局读取和1次全局写入。
注意: 对于这个问题,你不需要担心共享读取的次数。我们稍后会处理这个挑战。
def dot_spec(a, b):
return a @ b
TPB = 8
def dot_test(cuda):
def call(out, a, b, size) -> None:
shared = cuda.shared.array(TPB, numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
# 在此填写代码(大约9行)
return call
SIZE = 8
out = np.zeros(1)
a = np.arange(SIZE)
b = np.arange(SIZE)
problem = CudaProblem(
"点积",
dot_test,
[a, b],
out,
[SIZE],
threadsperblock=Coord(SIZE, 1),
blockspergrid=Coord(1, 1),
spec=dot_spec,
)
problem.show()
# 点积
每线程最高得分:
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果: [0.]
规范结果: 140
题目11 - 一维卷积
实现一个计算 a 和 b 之间一维卷积并存储在 out 中的内核。
你需要处理一般情况。每个线程只需要2次全局读取和1次全局写入。
def conv_spec(a, b):
out = np.zeros(*a.shape)
len = b.shape[0]
for i in range(a.shape[0]):
out[i] = sum([a[i + j] * b[j] for j in range(len) if i + j < a.shape[0]])
return out
MAX_CONV = 4
TPB = 8
TPB_MAX_CONV = TPB + MAX_CONV
def conv_test(cuda):
def call(out, a, b, a_size, b_size) -> None:
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
# 在此填写代码 (大约17行)
return call
# 测试1
SIZE = 6
CONV = 3
out = np.zeros(SIZE)
a = np.arange(SIZE)
b = np.arange(CONV)
problem = CudaProblem(
"一维卷积 (简单)",
conv_test,
[a, b],
out,
[SIZE, CONV],
Coord(1, 1),
Coord(TPB, 1),
spec=conv_spec,
)
problem.show()
# 一维卷积 (简单)
每线程最高得分:
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果: [0. 0. 0. 0. 0. 0.]
规范结果: [ 5. 8. 11. 14. 5. 0.]
测试2
out = np.zeros(15)
a = np.arange(15)
b = np.arange(4)
problem = CudaProblem(
"一维卷积 (完整)",
conv_test,
[a, b],
out,
[15, 4],
Coord(2, 1),
Coord(TPB, 1),
spec=conv_spec,
)
problem.show()
# 一维卷积 (完整)
每线程最高得分:
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果: [0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0. 0.]
规范结果: [14. 20. 26. 32. 38. 44. 50. 56. 62. 68. 74. 80. 41. 14. 0.]
题目12 - 前缀和
实现一个计算 a 的和并存储在 out 中的内核。
如果 a 的大小大于块大小,则只存储每个块的和。
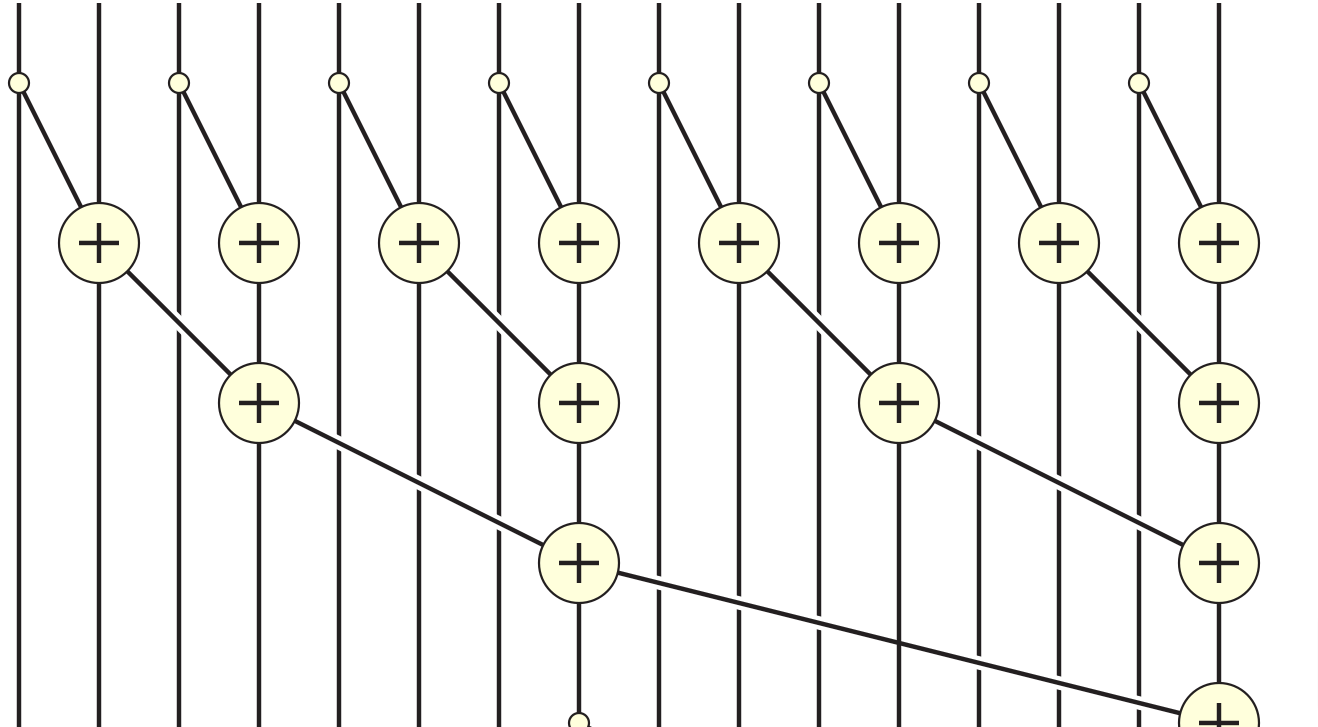
我们将使用共享内存中的并行前缀和算法来实现这一点。 即算法的每一步应该将剩余数字的一半相加。 请按照下图所示:
TPB = 8
def sum_spec(a):
out = np.zeros((a.shape[0] + TPB - 1) // TPB)
for j, i in enumerate(range(0, a.shape[-1], TPB)):
out[j] = a[i : i + TPB].sum()
return out
def sum_test(cuda):
def call(out, a, size: int) -> None:
cache = cuda.shared.array(TPB, numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
# 在此填写代码 (大约12行)
return call
# 测试1
SIZE = 8
out = np.zeros(1)
inp = np.arange(SIZE)
problem = CudaProblem(
"求和 (简单)",
sum_test,
[inp],
out,
[SIZE],
Coord(1, 1),
Coord(TPB, 1),
spec=sum_spec,
)
problem.show()
# 求和 (简单)
每线程最高得分:
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果: [0.]
规范结果: [28.]
测试2
SIZE = 15
out = np.zeros(2)
inp = np.arange(SIZE)
problem = CudaProblem(
"求和 (完整)",
sum_test,
[inp],
out,
[SIZE],
Coord(2, 1),
Coord(TPB, 1),
spec=sum_spec,
)
problem.show()
# 求和 (完整)
每线程最高得分:
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果: [0. 0.]
规范结果: [28. 77.]
题目13 - 轴向求和
实现一个计算 a 的每列之和并存储在 out 中的内核。
TPB = 8
def sum_spec(a):
out = np.zeros((a.shape[0], (a.shape[1] + TPB - 1) // TPB))
for j, i in enumerate(range(0, a.shape[-1], TPB)):
out[..., j] = a[..., i : i + TPB].sum(-1)
return out
def axis_sum_test(cuda):
def call(out, a, size: int) -> None:
cache = cuda.shared.array(TPB, numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
local_i = cuda.threadIdx.x
batch = cuda.blockIdx.y
# 在此填写代码 (大约12行)
return call
BATCH = 4
SIZE = 6
out = np.zeros((BATCH, 1))
inp = np.arange(BATCH * SIZE).reshape((BATCH, SIZE))
problem = CudaProblem(
"轴向求和",
axis_sum_test,
[inp],
out,
[SIZE],
Coord(1, BATCH),
Coord(TPB, 1),
spec=sum_spec,
)
problem.show()
# 轴向求和
每线程最高得分:
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果: [[0.]
[0.]
[0.]
[0.]]
规范结果: [[ 15.]
[ 51.]
[ 87.]
[123.]]
谜题14 - 矩阵相乘!
实现一个内核,将方阵 a 和 b 相乘,并将结果存储在 out 中。
提示:这里最高效的算法是在计算每个单独的行列点积之前,将一个块复制到共享内存中。如果矩阵适合共享内存,这很容易做到。先完成这种情况。然后更新你的代码以计算部分点积,并迭代地移动你复制到共享内存中的部分。 你应该能够在6次全局读取中完成困难的情况。
def matmul_spec(a, b):
return a @ b
TPB = 3
def mm_oneblock_test(cuda):
def call(out, a, b, size: int) -> None:
a_shared = cuda.shared.array((TPB, TPB), numba.float32)
b_shared = cuda.shared.array((TPB, TPB), numba.float32)
i = cuda.blockIdx.x * cuda.blockDim.x + cuda.threadIdx.x
j = cuda.blockIdx.y * cuda.blockDim.y + cuda.threadIdx.y
local_i = cuda.threadIdx.x
local_j = cuda.threadIdx.y
# 在此填写代码(大约14行)
return call
# 测试1
SIZE = 2
out = np.zeros((SIZE, SIZE))
inp1 = np.arange(SIZE * SIZE).reshape((SIZE, SIZE))
inp2 = np.arange(SIZE * SIZE).reshape((SIZE, SIZE)).T
problem = CudaProblem(
"矩阵乘法(简单)",
mm_oneblock_test,
[inp1, inp2],
out,
[SIZE],
Coord(1, 1),
Coord(TPB, TPB),
spec=matmul_spec,
)
problem.show(sparse=True)
# 矩阵乘法(简单)
得分(每线程最大):
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果:[[0. 0.]
[0. 0.]]
规范结果:[[ 1 3]
[ 3 13]]
测试2
SIZE = 8
out = np.zeros((SIZE, SIZE))
inp1 = np.arange(SIZE * SIZE).reshape((SIZE, SIZE))
inp2 = np.arange(SIZE * SIZE).reshape((SIZE, SIZE)).T
problem = CudaProblem(
"矩阵乘法(完整)",
mm_oneblock_test,
[inp1, inp2],
out,
[SIZE],
Coord(3, 3),
Coord(TPB, TPB),
spec=matmul_spec,
)
problem.show(sparse=True)
# 矩阵乘法(完整)
得分(每线程最大):
| 全局读取 | 全局写入 | 共享读取 | 共享写入 |
| 0 | 0 | 0 | 0 |

problem.check()
测试失败。
你的结果:[[0. 0. 0. 0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0. 0. 0. 0.]
[0. 0. 0. 0. 0. 0. 0. 0.]]
规范结果:[[ 140 364 588 812 1036 1260 1484 1708]
[ 364 1100 1836 2572 3308 4044 4780 5516]
[ 588 1836 3084 4332 5580 6828 8076 9324]
[ 812 2572 4332 6092 7852 9612 11372 13132]
[ 1036 3308 5580 7852 10124 12396 14668 16940]
[ 1260 4044 6828 9612 12396 15180 17964 20748]
[ 1484 4780 8076 11372 14668 17964 21260 24556]
[ 1708 5516 9324 13132 16940 20748 24556 28364]]











