
DriveMLM:开启自动驾驶的语言智能新时代
在人工智能和自动驾驶技术飞速发展的今天,如何让自动驾驶系统拥有更强大的认知能力和决策能力,一直是业界关注的焦点。近日,由OpenGVLab团队开发的DriveMLM项目为我们带来了一个全新的解决方案,它巧妙地将大语言模型(LLM)的强大语言理解和生成能力引入自动驾驶领域,开创了自动驾驶研究的新范式。
DriveMLM:bridging语言与控制的鸿沟
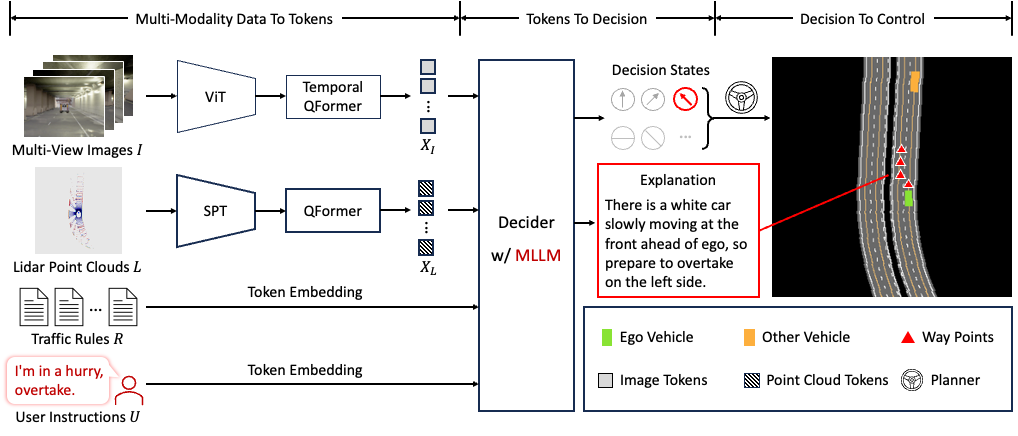
DriveMLM的核心创新在于成功地将语言决策与车辆控制命令进行了对齐。传统的自动驾驶系统往往将感知、决策和控制划分为相对独立的模块,而DriveMLM则打破了这种界限,通过多模态大语言模型(MLLM)来统一建模行为规划模块。
具体来说,DriveMLM首先根据现有运动规划模块对决策状态进行标准化,从而在语言决策和车辆控制指令之间架起了一座桥梁。接着,它采用MLLM来模拟AD系统的行为规划模块,将驾驶规则、用户指令以及来自摄像头、激光雷达等各种传感器的输入作为输入,然后做出驾驶决策并提供解释。这种设计使得DriveMLM可以无缝插入现有的AD系统(如Apollo)中进行闭环驾驶。
数据驱动的训练与评估
为了训练和评估这个创新的模型,DriveMLM团队设计了一个高效的数据引擎,收集了包含决策状态和相应解释注释的数据集。这不仅为模型提供了丰富的学习材料,也为后续的性能评估奠定了基础。
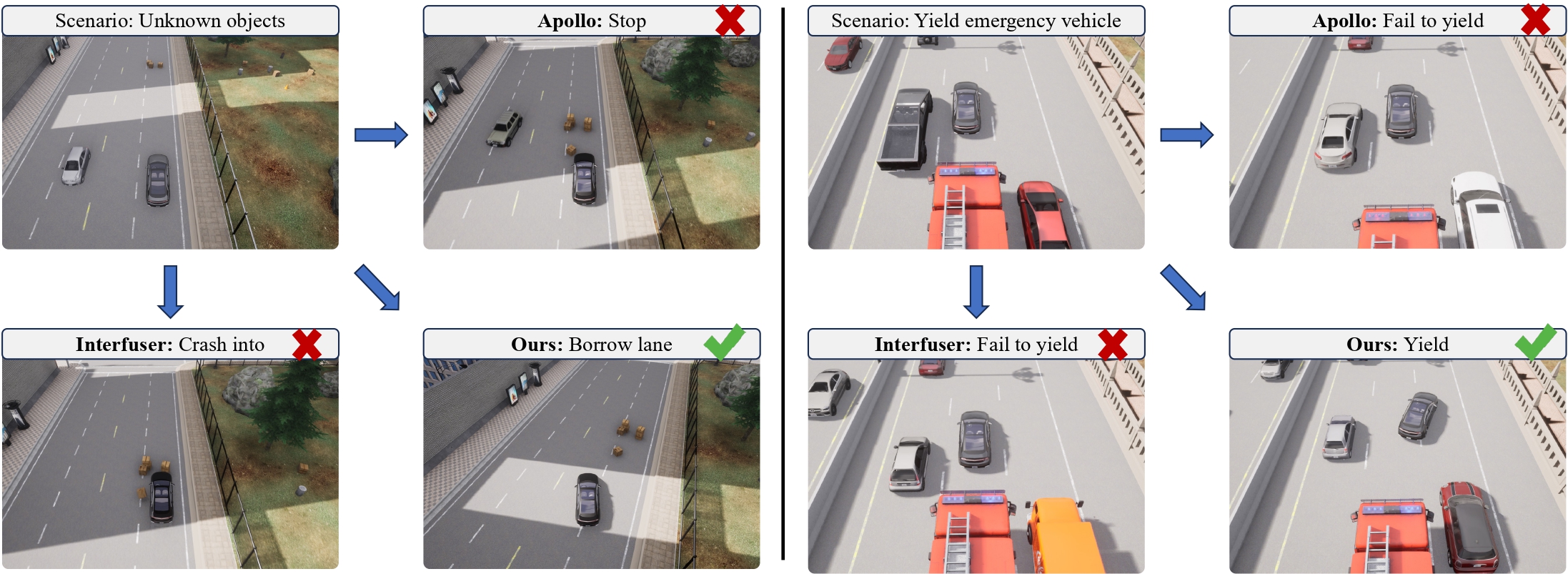
在CARLA Town05 Long场景的测试中,DriveMLM取得了76.1的驾驶得分,比Apollo基准高出4.7分,充分证明了其有效性。这一成果不仅显示了DriveMLM在标准测试场景中的优异表现,也为未来在更复杂、多变的真实道路环境中的应用提供了可能性。
DriveMLM的独特优势
-
人机协作的新范式
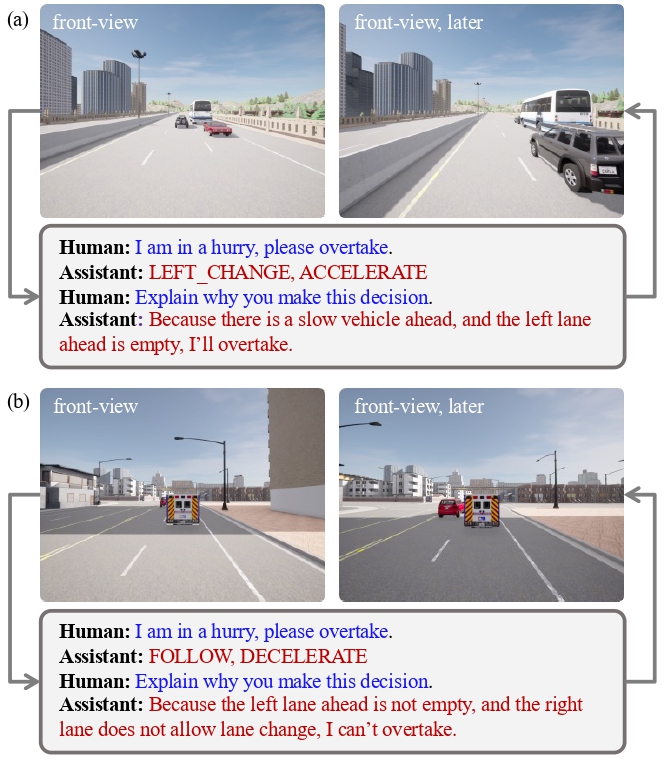
DriveMLM能够理解并执行人类指令,这为人机协作开辟了新的可能。例如,当遇到"请在下一个路口右转"这样的指令时,DriveMLM可以准确理解并执行,同时还能提供决策理由。
-
多场景适应能力
得益于大语言模型强大的泛化能力,DriveMLM能够处理更多样化的驾驶场景。无论是复杂的城市道路还是高速公路,它都能做出合适的判断和决策。
-
可解释性决策
与传统的"黑盒"决策系统不同,DriveMLM每一个决策都伴随着清晰的语言解释。这不仅提高了系统的可信度,也为后续的改进和调试提供了便利。
未来展望
DriveMLM的出现无疑为自动驾驶领域注入了新的活力。它不仅展示了大语言模型在自动驾驶中的潜力,也为未来的智能交通系统指明了一个可能的发展方向。
-
安全性提升:通过语言模型的推理能力,DriveMLM有望在复杂和模糊的交通情况下做出更安全、更人性化的决策。
-
个性化体验:未来的DriveMLM可能会根据不同乘客的偏好和需求,调整驾驶风格和路线选择,提供更加个性化的乘车体验。
-
多模态融合:随着传感器技术的进步,DriveMLM有潜力整合更多类型的输入信息,如高精度地图、实时交通数据等,做出更全面的决策。
-
法规与伦理适应:语言模型的灵活性使得DriveMLM在面对不同地区的交通法规和伦理标准时,能够更快地适应和调整。
结语
DriveMLM的出现标志着自动驾驶技术与人工智能语言模型的深度融合。它不仅是技术上的突破,更是自动驾驶思维方式的一次革新。虽然目前DriveMLM还处于研究阶段,但它所展现的潜力和前景无疑是令人振奋的。
随着技术的不断成熟和完善,我们有理由相信,像DriveMLM这样的智能系统将在不久的将来成为现实,为我们带来更安全、更高效、更人性化的自动驾驶体验。在这个AI与自动驾驶技术快速迭代的时代,DriveMLM无疑为我们描绘了一幅激动人心的未来蓝图。
让我们共同期待DriveMLM及类似技术的进一步发展,相信在不久的将来,智能化、个性化的自动驾驶体验将成为现实,为我们的出行方式带来革命性的变革。










