
斯坦福四足机器人(Stanford Quadruped):开源、高性能的四足机器人研究平台
四足机器人作为一种能够适应复杂地形的移动平台,近年来在机器人领域备受关注。然而,大多数商用四足机器人价格昂贵,难以满足广大研究者和爱好者的需求。为了推动四足机器人技术的普及和发展,斯坦福大学机器人俱乐部开发了Stanford Quadruped项目,旨在打造一款开源、低成本且性能优异的四足机器人研究平台。
项目起源与发展
Stanford Quadruped项目始于2018年,由斯坦福大学学生Nathan Kau发起。最初的目标是开发一款价格在1000美元左右的四足机器人,以供教育和研究使用。经过多年的迭代优化,项目已经发展到第三代产品Pupper v3。

Stanford Quadruped项目包括两款主要产品:
- Stanford Pupper:小型四足机器人,重量约2kg,适合教育和小型研究项目。
- Stanford Woofer:更大型的四足机器人,可搭载额外设备,适合复杂的研究任务。
这两款机器人均采用开源设计,任何人都可以根据项目提供的材料清单和说明自行制作。
技术特点
Stanford Quadruped项目的成功关键在于其优秀的技术设计。以最新的Pupper v3为例,其主要技术特点包括:
-
高性能驱动:采用400W GIM4305无刷电机,提供强劲动力。
-
先进控制:基于树莓派5开发板,运行强化学习的运动控制算法。
-
环境感知:配备Luxonis SR深度相机,可实现3D环境感知。
-
人机交互:集成LCD显示屏,用于调试和表情显示。
-
开源设计:硬件和软件均开源,方便二次开发。
-
成本控制:整机BOM成本约1000美元,远低于商用产品。
Stanford Quadruped的控制系统采用模块化设计,主要包括以下几个部分:
- 步态规划器:负责规划机器人的运动步态,如小跑、行走等。
- 姿态控制器:控制机器人身体的姿态和平衡。
- 摆动控制器:控制腿部的摆动轨迹。
- 逆运动学模型:将笛卡尔坐标系中的目标位置转换为电机角度。
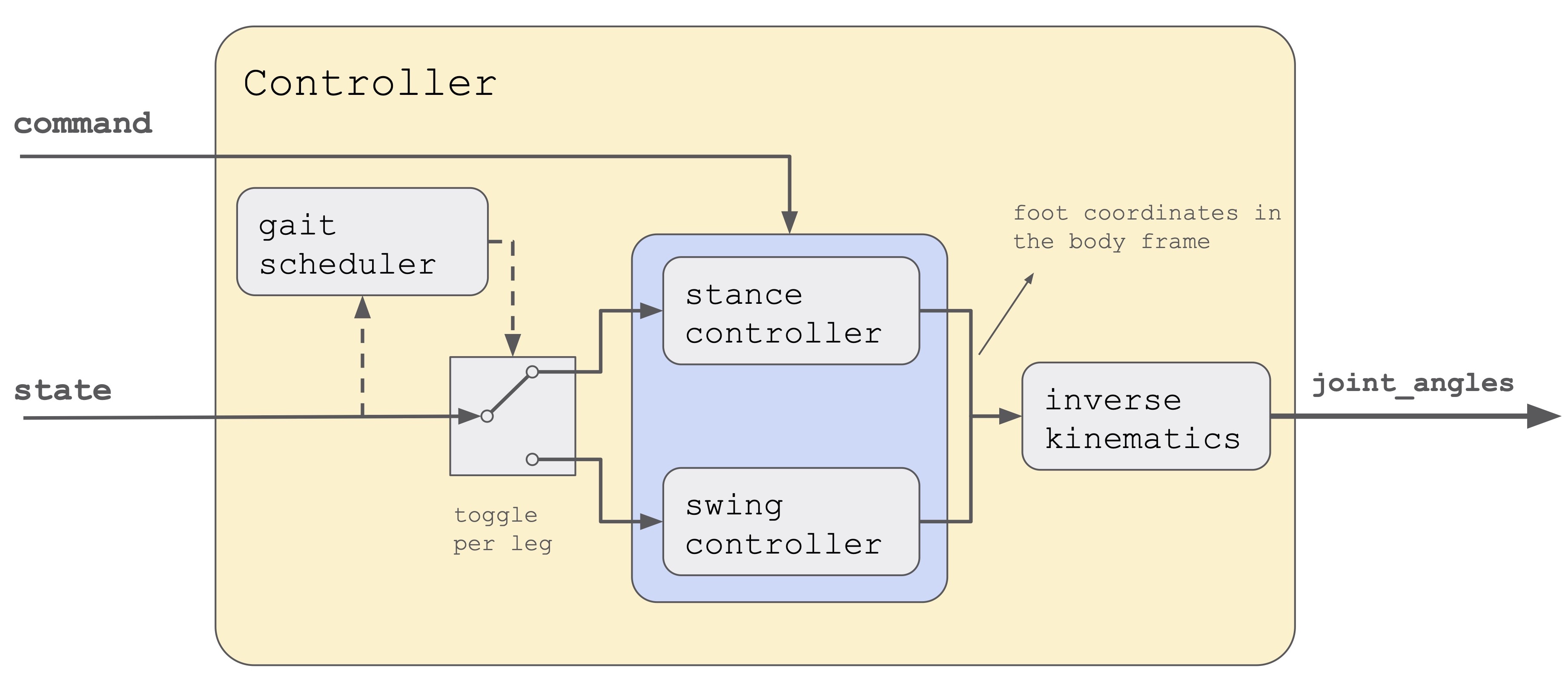
这种模块化的设计使得研究者可以方便地修改和优化各个模块,进行算法创新。
应用与影响
Stanford Quadruped项目自发布以来,在全球范围内得到了广泛关注和应用。其主要应用领域包括:
-
机器人教育:许多大学将Stanford Quadruped用作教学平台,让学生亲手搭建和编程四足机器人。
-
算法研究:研究人员利用这一平台开发和测试新的运动控制算法、机器学习方法等。
-
原型开发:一些公司和创业团队基于Stanford Quadruped开发自己的四足机器人产品。
-
科普展示:因其灵活的运动能力,Stanford Quadruped常被用于科技展览和科普活动。
该项目的成功也启发了其他类似的开源四足机器人项目,如MangDang公司的Mini Pupper等,共同推动了四足机器人技术的普及。
未来展望
随着Pupper v3的发布,Stanford Quadruped项目进入了一个新的阶段。项目团队表示,未来将重点关注以下几个方向:
-
进一步提升运动性能,如跳跃高度、运动速度等。
-
增强环境感知和自主导航能力。
-
开发更多应用场景,如搜救、巡检等。
-
完善开发文档和教学资料,降低使用门槛。
-
探索与产业界的合作,推动技术转化。
作为一个开源项目,Stanford Quadruped的发展离不开社区的贡献。项目欢迎全球的研究者和爱好者参与其中,共同推动四足机器人技术的进步。
结语
Stanford Quadruped项目为四足机器人研究提供了一个开放、低成本且高性能的平台,大大降低了这一领域的准入门槛。随着项目的不断发展和完善,我们有理由相信,它将继续推动四足机器人技术的创新和应用,为未来的智能机器人发展做出重要贡献。
无论您是机器人研究者、学生还是爱好者,Stanford Quadruped都为您提供了一个绝佳的入门和实践平台。欢迎访问项目的GitHub页面和官方文档,开启您的四足机器人之旅!









