
YOLOv3算法简介
YOLOv3(You Only Look Once version 3)是一种快速、准确的目标检测算法,由Joseph Redmon等人于2018年提出。相比于之前的版本,YOLOv3在保持高速度的同时,显著提高了检测精度,特别是对小目标的检测能力。
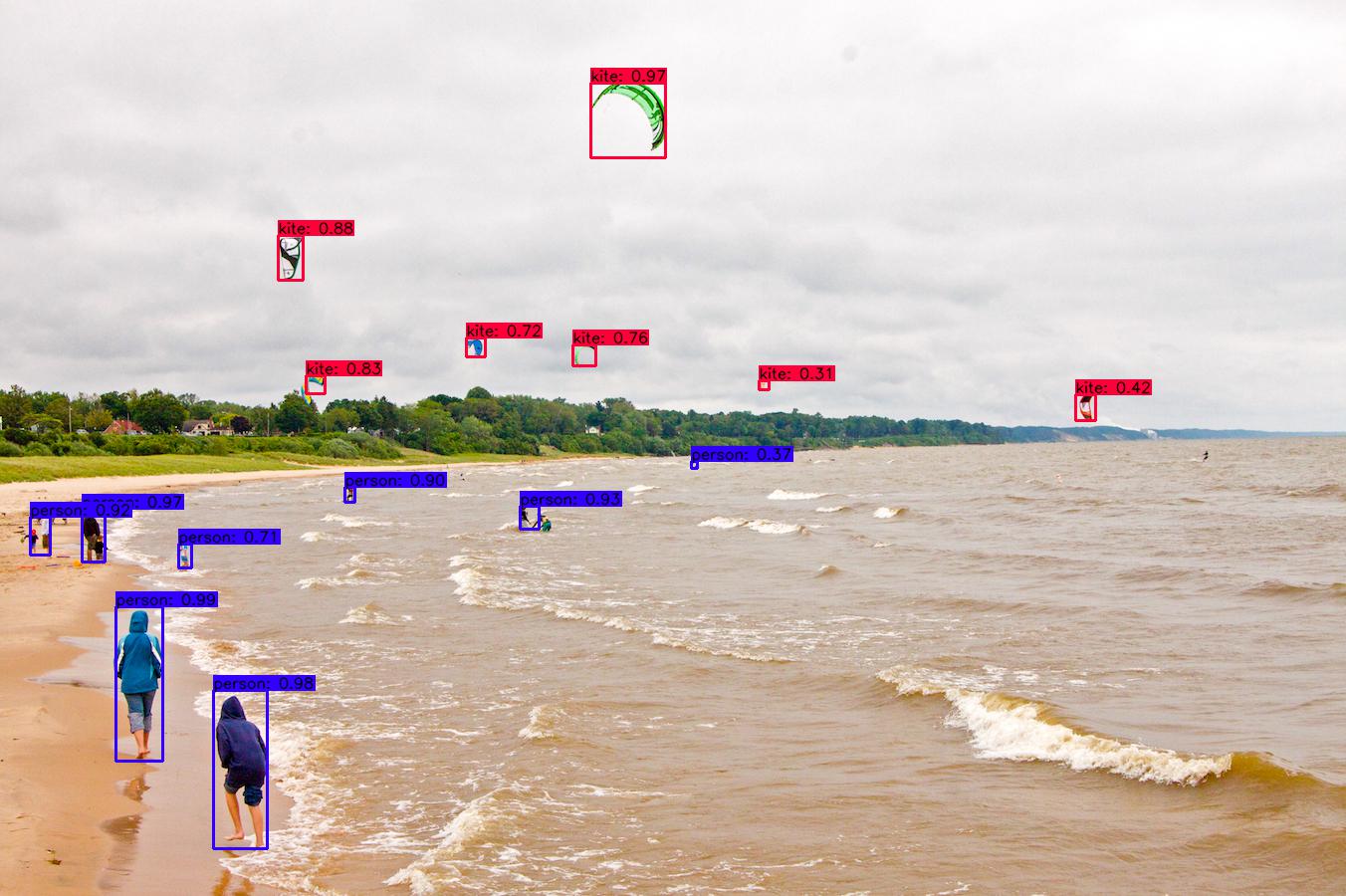
YOLOv3的核心思想是将图像划分为网格,每个网格负责预测包含目标中心的边界框。它采用单阶段检测方法,直接回归边界框的位置和类别,避免了繁琐的候选区域生成过程,从而实现了实时检测。
TensorFlow实现YOLOv3
1. 环境配置
首先需要安装TensorFlow及相关依赖:
pip install tensorflow opencv-python numpy
2. 网络结构
YOLOv3采用Darknet-53作为骨干网络,包含53个卷积层。主要由残差块和下采样层组成,有效提取图像特征。在Darknet-53之后,YOLOv3添加了几个卷积层用于检测。
def darknet53(inputs):
"""Darknet-53 feature extractor"""
x = conv2d_block(inputs, 32, 3)
x = conv2d_block(x, 64, 3, strides=2)
# 残差块
for i in range(1):
y = conv2d_block(x, 32, 1)
y = conv2d_block(y, 64, 3)
x = Add()([x, y])
x = conv2d_block(x, 128, 3, strides=2)
# 更多残差块...
return x
def yolov3(inputs, num_classes):
"""YOLOv3 model"""
x = darknet53(inputs)
# 检测层
x = conv2d_block(x, 512, 1)
x = conv2d_block(x, 1024, 3)
x = conv2d_block(x, 512, 1)
x = conv2d_block(x, 1024, 3)
x = conv2d_block(x, 512, 1)
detect1 = detect_layer(x, num_classes)
# 上采样和更多检测层...
return [detect1, detect2, detect3]
3. 损失函数
YOLOv3的损失函数包括三个部分:
- 边界框坐标损失
- 目标置信度损失
- 类别预测损失
def yolo_loss(y_true, y_pred):
"""YOLOv3 loss function"""
# 边界框坐标损失
xy_loss = object_mask * box_loss_scale * K.square(true_xy - pred_xy)
wh_loss = object_mask * box_loss_scale * K.square(true_wh - pred_wh)
# 置信度损失
obj_loss = binary_crossentropy(true_obj, pred_obj)
noobj_loss = (1 - object_mask) * binary_crossentropy(true_obj, pred_obj)
# 类别损失
class_loss = object_mask * sparse_categorical_crossentropy(true_class, pred_class)
return xy_loss + wh_loss + obj_loss + noobj_loss + class_loss
4. 训练过程
训练YOLOv3模型需要以下步骤:
- 准备数据集和标注
- 数据增强
- 模型编译
- 训练循环
# 模型编译
model.compile(optimizer=Adam(lr=1e-3), loss=yolo_loss)
# 训练
history = model.fit(
train_dataset,
epochs=100,
validation_data=val_dataset,
callbacks=[
ModelCheckpoint('yolov3_model.h5', save_best_only=True),
ReduceLROnPlateau(patience=3, factor=0.1)
]
)
在自定义数据集上训练YOLOv3
要在自定义数据集上训练YOLOv3,需要以下步骤:
- 准备数据集:收集图像并标注边界框和类别。
- 生成训练文件:创建包含图像路径和标注信息的文本文件。
- 修改配置:调整类别数量、锚框等参数。
- 训练模型:使用自定义数据集进行训练。
示例训练文件格式:
path/to/image1.jpg 50,60,200,300,2 30,50,100,200,1
path/to/image2.jpg 10,20,150,250,3 300,400,450,550,5
每行包含图像路径和多个边界框信息(x_min,y_min,x_max,y_max,class_id)。
模型评估
评估YOLOv3模型性能的常用指标包括:
- 平均精度(mAP)
- 召回率(Recall)
- 精确率(Precision)
- F1分数
可以使用以下代码计算这些指标:
from mAP import mean_average_precision
mAP = mean_average_precision(ground_truth, predictions, iou_threshold=0.5)
print(f"mAP@0.5: {mAP:.4f}")
应用案例
YOLOv3在多个领域有广泛应用,例如:
- 自动驾驶:检测道路上的车辆、行人和交通标志。
- 安防监控:识别可疑人员和行为。
- 医疗影像:检测X光片或CT扫描中的病变。
- 工业质检:识别产品缺陷。
优化技巧
- 数据增强:随机裁剪、翻转、调整亮度等。
- 学习率调度:使用warmup和余弦退火。
- 标签平滑:提高模型泛化能力。
- 多尺度训练:增强对不同大小目标的适应性。
结论
TensorFlow实现的YOLOv3为目标检测任务提供了一个高效、灵活的解决方案。通过深入理解算法原理和掌握实现技巧,我们可以将YOLOv3应用于各种实际场景,解决复杂的计算机视觉问题。
未来,随着硬件性能的提升和算法的持续优化,我们可以期待YOLOv3及其后续版本在速度和精度上取得更大的突破,为更多领域带来创新应用。
参考资源
通过本文的介绍,相信读者已经对YOLOv3算法有了全面的了解,并能够使用TensorFlow框架实现和应用这一强大的目标检测算法。在实践中,建议读者从小数据集开始,逐步扩展到更复杂的应用场景,不断优化模型性能,以充分发挥YOLOv3的潜力。















