
 访问官网
访问官网 Github
Github 论文
论文动态高斯网格
项目页面 | 论文
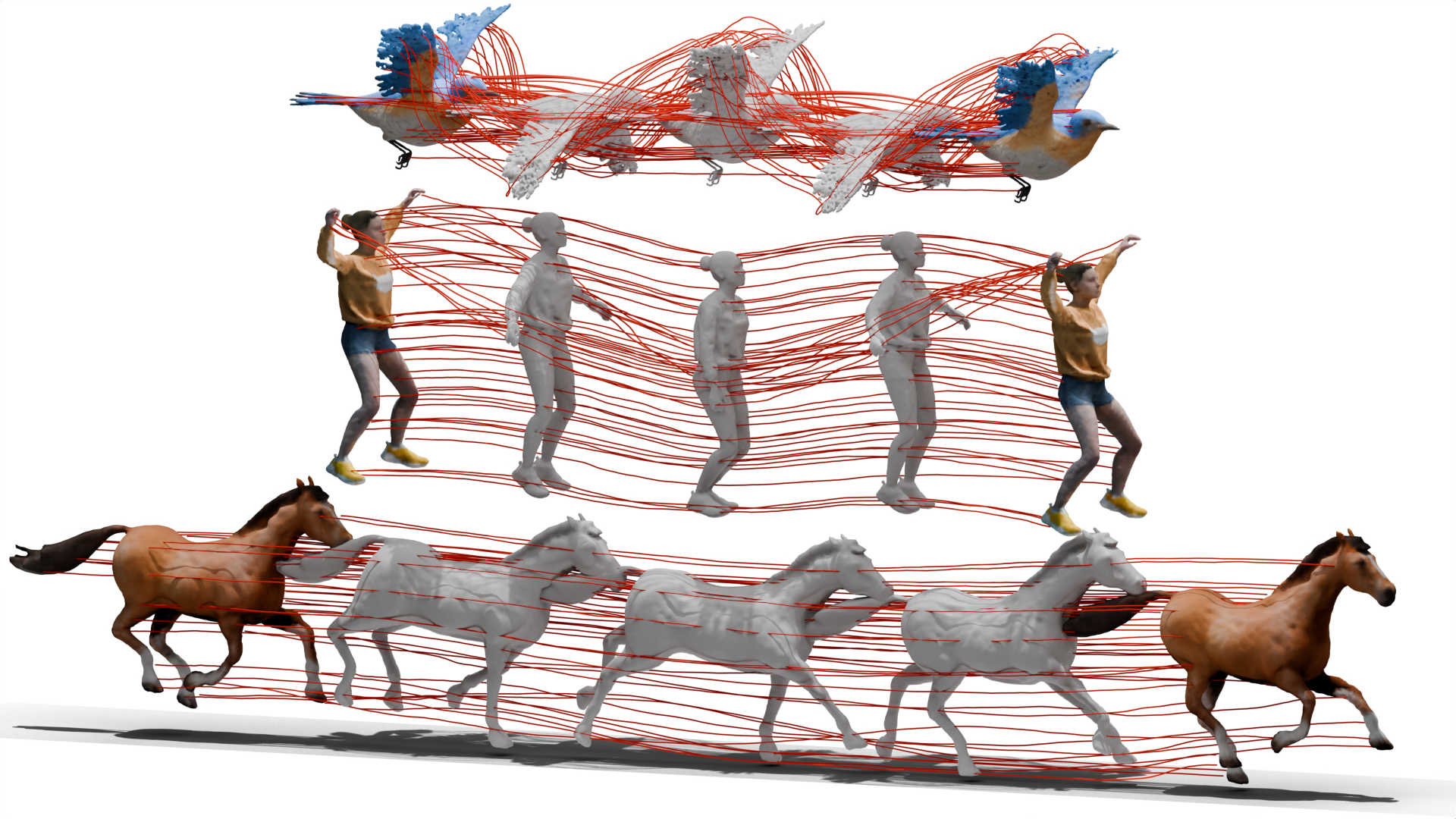
我们提出了DG-Mesh,一个从单目视频重建高保真时间一致网格的框架。给定动态场景的单目输入和相机参数,我们的方法可以重建高质量的表面及其外观,以及跨时间帧的网格顶点运动。我们的方法可以重建具有灵活拓扑变化的网格。即使在像鸟翼这样具有挑战性的细薄结构中,我们也能重建出令人满意的表面。
待办事项
- 安装说明
- 训练/推理代码
- 网格评估代码
- DG-Mesh数据集
- 网格对应关系可视化
安装
conda create -n dg-mesh python=3.9
conda activate dg-mesh
conda install pytorch torchvision torchaudio pytorch-cuda=11.8 -c pytorch -c nvidia
# 安装nvdiffrast
pip install git+https://github.com/NVlabs/tiny-cuda-nn#subdirectory=bindings/torch
pip install git+https://github.com/NVlabs/nvdiffrast/
# 安装pytorch3d
export FORCE_CUDA=1
conda install -c fvcore -c iopath -c conda-forge fvcore iopath -y
pip install "git+https://github.com/facebookresearch/pytorch3d.git"
# 克隆此仓库
git clone https://github.com/Isabella98Liu/DG-Mesh.git
cd DG-Mesh
# 安装子模块
pip install dgmesh/submodules/diff-gaussian-rasterization
pip install dgmesh/submodules/simple-knn
# 安装其他依赖
pip install -r requirements.txt
在D-NeRF数据集上训练
我们提供配置文件以在D-NeRF数据集上训练我们的模型。下载数据集并更改相应配置文件中的source_path:
python dgmesh/train.py --config dgmesh/configs/d-nerf/jumpingjacks.yaml
我们还提供渲染脚本来可视化网格及其渲染结果,以及训练模型中的高斯点。将--start_checkpoint设置为已训练模型的路径。例如:
python dgmesh/render_trajectory.py --config dgmesh/configs/d-nerf/jumpingjacks.yaml --start_checkpoint outputs/d-nerf/jumpingjacks/jumpingjacks-2024-07-01_06-03-50
D-NeRF数据集上的网格渲染结果和高斯点示例。
在DG-Mesh数据集上训练
为了定量评估重建的网格,我们提供了一个包含六个动态场景的合成数据集。每个场景包括200帧移动物体的图像和真实相机参数,以及每个时间帧下的真实网格。您可以通过提供的链接下载DG-Mesh数据集。数据格式遵循D-NeRF数据集。
要训练模型,请修改相应配置文件中的 source_path 并运行以下命令:
python dgmesh/train.py --config dgmesh/configs/dg-mesh/beagle.yaml
DG-Mesh数据集上的网格渲染结果和高斯点示例。
在Nerfies数据集上训练
我们提供了部分处理过的Nerfies数据,其中还包含了物体前景掩码;你可以在发布页面的这里下载。要在Nerfies数据集上训练模型,请运行以下命令:
python dgmesh/train.py --config dgmesh/configs/nerfies/toby-sit.yaml
要在测试摄像机视角下渲染网格,请运行以下脚本:
python dgmesh/render_test.py --config /mnt/samsung990/ECCV2024/Release/DG-Mesh/dgmesh/configs/nerfies/toby-sit.yaml --start_checkpoint outputs/nerfies/toby-sit/toby-sit-2024-07-04_22-56-29
在NeuralActor数据集上训练
NeuralActor数据集是一个多视角动态数据集,包含了移动中的人体多视角视频。我们处理了部分数据集(如果获得批准将发布处理后的数据)。要在NeuralActor数据集上运行模型:
python dgmesh/train.py --config dgmesh/configs/neural-actor/D2_vlad.yaml
在iPhone拍摄的视频上训练
我们使用iPhone 14 Pro和Record3D捕捉了几个动态场景,并使用Reality Check中的流程进行处理。我们使用DEVA获取前景掩码。你可以通过发布页面的链接下载数据。要在我们捕捉的数据上训练模型,请运行:
python dgmesh/train.py --config /dgmesh/configs/iphone/tiger.yaml
网格评估
我们提供了DG-Mesh数据集上的网格评估脚本;请按以下方式组织网格GT数据和你的网格结果:
mesh_eval_folder/
├── gt/
│ ├── objname0.obj
│ ├── objname1.obj
│ └── ...
├── DG-Mesh/
│ └── dynamic_mesh/
│ ├── frame_0.ply
│ ├── frame_1.ply
│ └── ...
└── transforms_train.json
您可能需要安装StructuralLoss来计算EMD;请按照以下说明进行操作:
cd dgmesh/metrics/pytorch_structural_losses/
make clean
make
要运行评估:
python mesh_evaluation.py --path mesh_eval_folder --eval_type dgmesh
引用
如果您觉得我们的代码或论文有帮助,请考虑引用:
@misc{liu2024dynamic,
title={Dynamic Gaussians Mesh: Consistent Mesh Reconstruction from Monocular Videos},
author={Isabella Liu and Hao Su and Xiaolong Wang},
year={2024},
eprint={2404.12379},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
同时感谢Deformable 3DGS和3DGS的作者们提供的优秀代码!











