










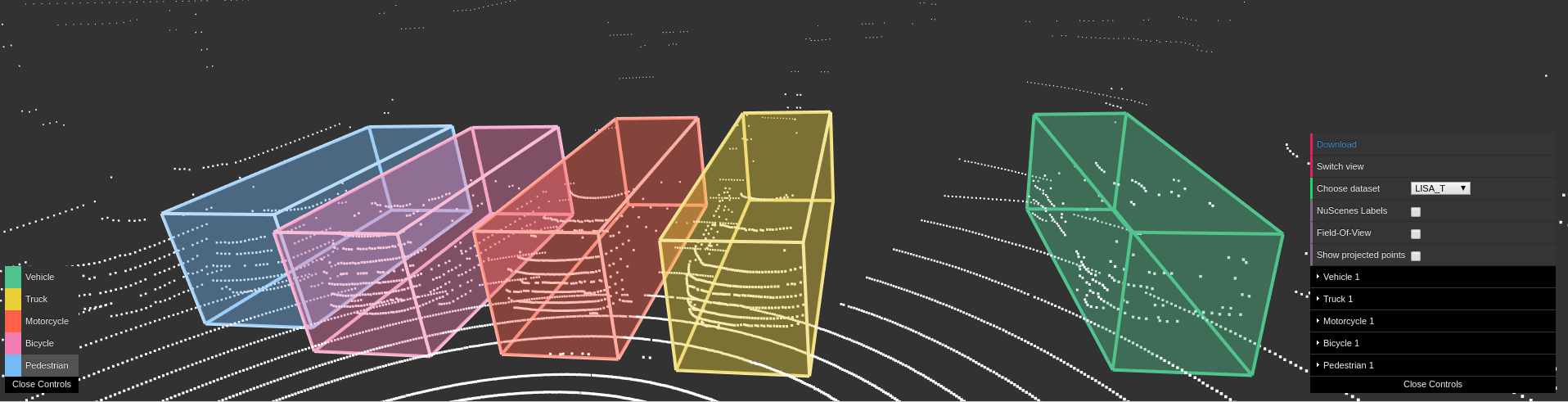
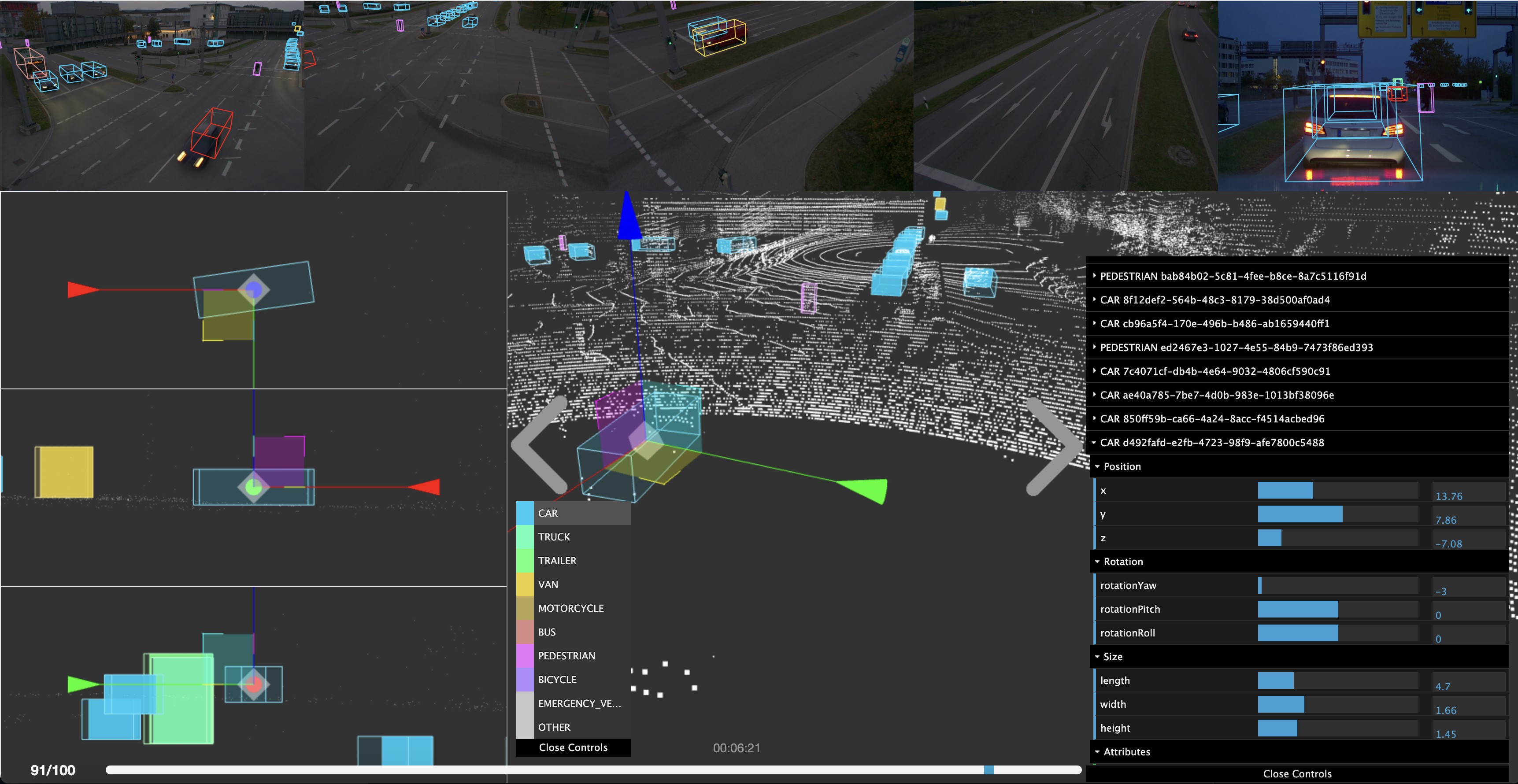
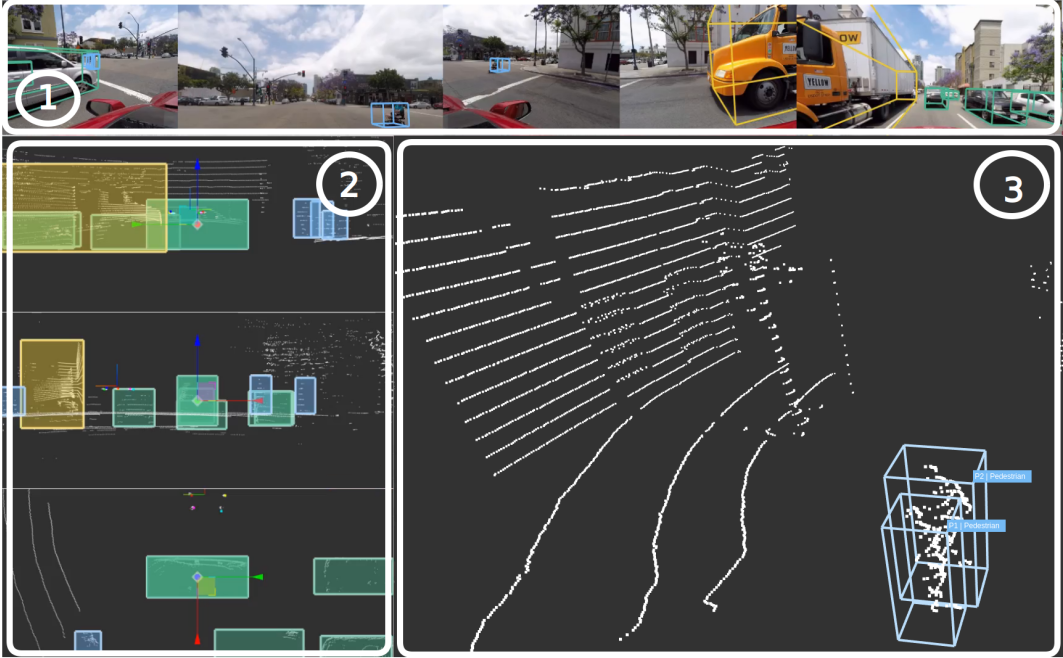
3D边界框标注工具箱

概览 ✨
新闻 📢
- 2024/02:论文被CVPR'24会议接收:TUMTraf V2X协同感知数据集
- 2024/01:支持主动学习。向IV'24会议提交论文:ActiveAnno3D - 多模态3D目标检测的主动学习框架
- 2023/09:🏆 在ITSC'23会议上获得IEEE最佳学生论文奖:TUMTraf交叉路口数据集:城市3D相机-LiDAR路侧感知所需的一切
- 2022/08:AI辅助标注功能
- 2022/04:论文被IV'22会议接收:A9数据集:基于多传感器基础设施的移动研究数据集
- 2021/02:更新版3D边界框标注工具箱(3D BAT 2021)
- 2019/04:论文被IV'19会议接收:3D BAT:用于全周围、多模态数据流的半自动、基于Web的3D标注工具箱
- 2019/03:3D边界框标注工具箱首次发布
特性 🔥
- 全周围标注
- AI辅助标注
- 批量编辑模式
- 插值模式
- 3D到2D标签转换(投影)
- 自动跟踪
- 侧视图(俯视、正视、侧视)
- 3D导航
- 自动地面检测
- 3D变换控制
- 透视视图编辑
- 正交视图编辑
- 2D和3D标注
- 基于Web(在线访问和跨平台)
- 重做/撤销功能
- 仅键盘标注模式
- 自动保存功能
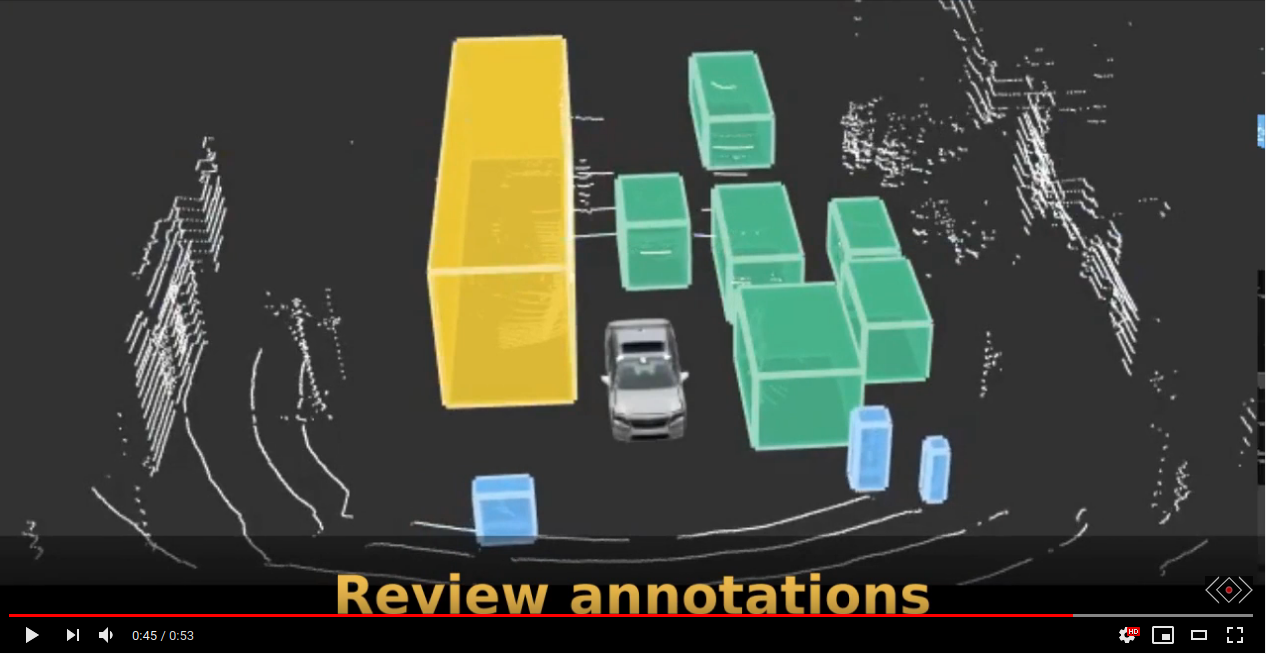
- 审核标注
- 序列模式
- 支持主动学习
- 支持高清地图
- 将标签复制到下一帧
- 在数据集和序列间切换
- 支持自定义数据集
- 支持自定义类别
- 支持自定义属性
- 支持V2X
- 支持OpenLABEL
- 支持多个传感器
- 对象着色
- 聚焦模式
- 支持JPG/PNG文件
- 支持离线标注
- 开源
- 可定制和可扩展
- 图像缩放
发布说明 📝
- 2024/03:3D BAT v24.3.2
- 增加标注V2X数据的支持
- 加载和显示高清地图
- 增加自定义对象类别的支持
- 增加自定义属性的支持
- 增加自定义数据集的支持
- 增加OpenLABEL的支持
- 增加主动学习的支持
- 增加AI辅助标注的支持
- 2019/02:3D BAT v19.2.1
- 首次发布,用于标注全周围车辆数据(3D到2D标签转换、侧视图、自动跟踪、插值模式、批量编辑模式)
快速开始 🚀
1. 安装npm
- Linux:
sudo apt-get install npm - Windows:https://nodejs.org/dist/v10.15.0/node-v10.15.0-x86.msi
- Mac:https://blog.teamtreehouse.com/install-node-js-npm-mac
2. 克隆仓库:
git clone https://github.com/walzimmer/3d-bat.git & cd 3d-bat
3. 安装所需的Python包:
conda create -n 3d-bat python==3.11.3
conda activate 3d-bat
pip install -r requirements.txt
conda install -c conda-forge nodejs==10.13.0
4. 安装所需的Node包:
npm install
5. 启动后端服务器
npm run start-server
6. 启动标注工具应用
npm run start
现在index.html文件应该会在指定的浏览器中打开(默认为chromium-browser)。
可以在package.json文件的第32行更改默认浏览器:
"start": "webpack serve --inline --open chromium-browser",
自定义数据标注 🌟
更多详细信息请参见自定义数据标注。
标注说明 🗒
数据标注说明可以在这里找到。
命令和快捷键 👨🏽💻
更多详细信息请参见命令和快捷键。
教程视频 📹
- 3D边界框标注工具箱 - 教程
- 更多教程视频可在
./tutorial_videos文件夹下找到。- 3D框变换(位置、旋转、缩放)
- 图像和点云标注
- 插值模式
- 使用侧视图(顶视图、前视图、侧视图)
- 重置和撤销/重做功能
📚 文档
readthedocs文档即将推出。
📝 引用
如果您在研究中使用3D边界框标注工具箱,请引用以下论文:
@inproceedings{zimmermann20193d,
title={3D BAT: A Semi-Automatic, Web-based 3D Annotation Toolbox for Full-Surround, Multi-Modal Data Streams},
author={Zimmer, Walter and Rangesh, Akshay and Trivedi, Mohan M.},
booktitle={2019 IEEE Intelligent Vehicles Symposium (IV)},
pages={1--8},
year={2019},
organization={IEEE}
}
@inproceedings{cress2022a9,
author={Creß, Christian and Zimmer, Walter and Strand, Leah and Fortkord, Maximilian and Dai, Siyi and Lakshminarasimhan, Venkatnarayanan and Knoll, Alois},
booktitle={2022 IEEE Intelligent Vehicles Symposium (IV)},
title={A9-Dataset: Multi-Sensor Infrastructure-Based Dataset for Mobility Research},
year={2022},
volume={},
number={},
pages={965-970},
doi={10.1109/IV51971.2022.9827401}
}
@inproceedings{zimmer2023tumtraf,
title={TUMTraf Intersection Dataset: All You Need for Urban 3D Camera-LiDAR Roadside Perception [Best Student Paper Award]},
author={Zimmer, Walter and Cre{\ss}, Christian and Nguyen, Huu Tung and Knoll, Alois C},
publisher = {IEEE},
booktitle={2023 IEEE Intelligent Transportation Systems ITSC},
year={2023}
}
@inproceedings{zimmer2024tumtrafv2x,
title={TUMTraf V2X Cooperative Perception Dataset},
author={Zimmer, Walter and Wardana, Gerhard Arya and Sritharan, Suren and Zhou, Xingcheng and Song, Rui and Knoll, Alois C.},
publisher={IEEE/CVF},
booktitle={2024 IEEE/CVF International Conference on Computer Vision and Pattern Recognition (CVPR)},
year={2024}
}
📜 许可证
版权所有 © 2019 加利福尼亚大学董事会
保留所有权利。特此授予许可,允许出于教育、研究和非营利目的复制、修改和分发此工具,无需费用,也无需书面协议,前提是上述版权声明、本段和以下三段出现在所有副本中。如需获得商业使用此软件的许可,请联系:
创新与商业化办公室
9500 Gilman Drive, Mail Code 0910
加利福尼亚大学
La Jolla, CA 92093-0910
(858) 534-5815
innovation@ucsd.edu
此工具的版权归加利福尼亚大学董事会所有。该代码"按原样"提供,不附带董事会的任何附带服务。董事会不保证工具的操作不会中断或无错误。最终用户理解该工具是为研究目的而开发的,建议不要出于任何原因完全依赖该工具。
在任何情况下,加利福尼亚大学均不对任何一方因使用此工具而造成的直接、间接、特殊、偶然或后果性损害(包括利润损失)负责,即使加利福尼亚大学已被告知可能发生此类损害。加利福尼亚大学特别声明不作任何保证,包括但不限于对适销性和特定用途适用性的暗示保证。此处提供的工具基于"按原样"的基础,加利福尼亚大学没有义务提供维护、支持、更新、增强或修改。











