
 访问官网
访问官网 Github
Github 文档
文档低成本机器人手臂
在这里加入等候名单以获得所有零件的一站式套装:https://tau-robotics.com/robots
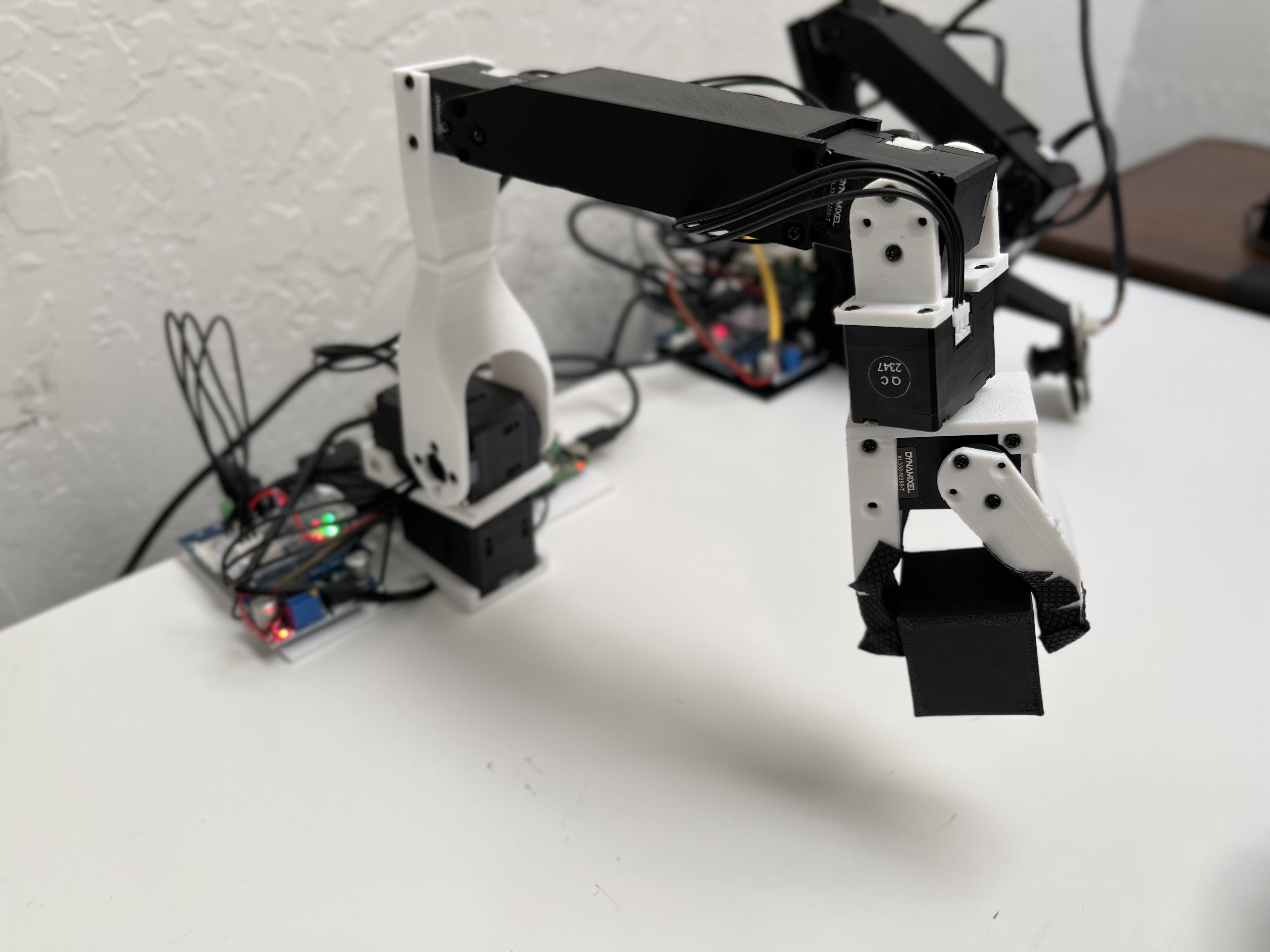
本仓库包含了构建和控制一个成本约250美元的低成本机器人手臂的文件。你还可以制作第二个机器人手臂(主控臂)来控制另一个手臂(从动臂),成本约180美元,总计430美元。主控臂的设计受到GELLO项目的启发,但更易于构建。这种机器人手臂非常适合机器人学习。两个这样的手臂还能够折叠衣物。
这个机器人手臂使用Dynamixel XL430和Dynamixel XL330伺服电机。XL430电机的力量几乎是两倍,用于前两个关节。XL330电机较弱,但每个只重18克。这使得手臂非常轻便且快速。Dynamixel销售U2D2适配器来将伺服电机连接到计算机。然而,这非常昂贵,并且延迟很高。这个构建使用了另一种更便宜的适配器板。机器人手臂可以通过Dynamixel SDK控制:pip install dynamixel-sdk
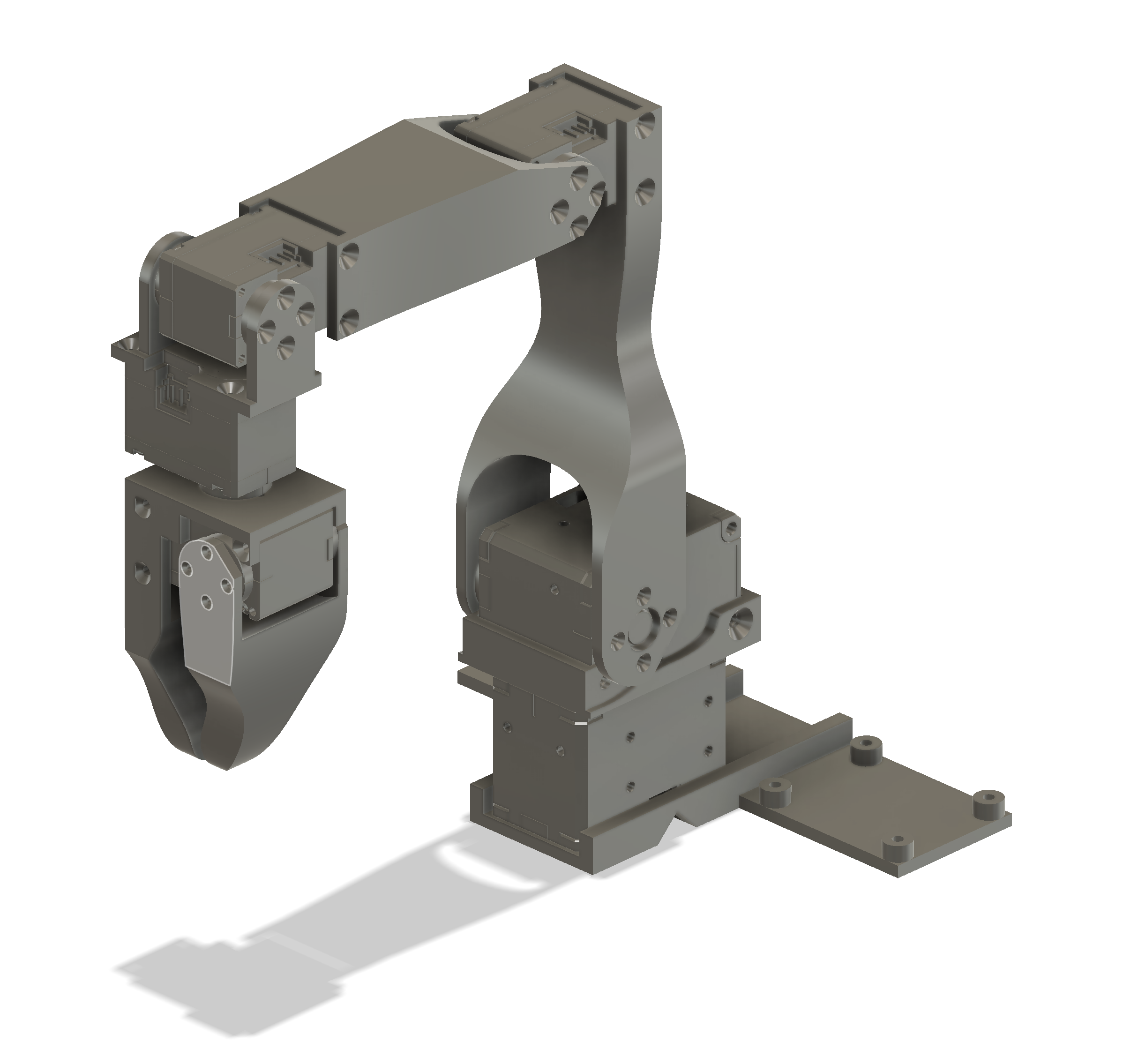
从动臂
所需材料
| 零件 | 成本 | 购买链接 | 规格 |
|---|---|---|---|
| 2个Dynamixel XL430-W250 | 100美元 | https://www.robotis.us/dynamixel-xl430-w250-t/ | https://emanual.robotis.com/docs/en/dxl/x/xl430-w250/ |
| 4个Dynamixel XL330-M288 | 96美元 | https://www.robotis.us/dynamixel-xl330-m288-t/ | https://emanual.robotis.com/docs/en/dxl/x/xl330-m288/ |
| XL330惰轮 | 10美元 | https://www.robotis.us/fpx330-h101-4pcs-set/ | 注意:四个一包;上图所示较长版本(带肘部到手腕延长部分)需要三个,较短版本(如组装视频所示)需要两个 |
| XL430惰轮 | 7美元 | https://www.robotis.us/hn11-i101-set/ | |
| Waveshare串行总线伺服驱动板 | 10美元 | https://a.co/d/7C3RUYU | |
| 降压模块 | 10美元 | https://a.co/d/cy02ADW | 注意:六个一包,每个从动臂只需要一个 |
| 12V电源 | 12美元 | https://a.co/d/40o8uMN | |
| 桌面夹具 | 6美元 | https://a.co/d/4KEiYdV | |
| 电线 | 7美元 | https://a.co/d/hQfk2cb | |
| 总计 | 258美元 |
Robotis商店通常有10%的折扣码。在夹持器上添加一些防滑胶带可能会有帮助(例如https://a.co/d/dW7BnEN)。需要一根USB-C线来将伺服驱动板连接到计算机。
组装
组装视频:https://youtu.be/RckrXOEoWrk
- 用3D打印机打印所有零件
- STL文件在
hardware/follower/stl目录中 - 这些零件设计为易于打印;只有夹持器的活动部分需要支撑
- STL文件在
- 扫描电机
- 将驱动板连接到计算机(应该适用于Linux和MacOS)
- 确定设备名称(例如MacOS上的tty.usbmodem57380045631):
ls /dev/tty.* - 使用Dynamixel Wizard逐个扫描每个电机
- 将所有电机的波特率设置为1M
- 将伺服ID从肩部设置为1到夹持器伺服设置为5(如果使用肘部到手腕延长部分,则为6)
- 组装
- 不带底座组装手臂
- 确保伺服电机固定在与CAD中相同的位置
- 拧紧时,伺服喇叭应处于默认位置
- 将电线焊接到降压模块上;输入应连接到母接头,输出连接到公接头
- 将降压模块和伺服驱动板拧到底座上
- 将底座拧到手臂上
- 将驱动板上的D、V和G端口连接到肩部旋转伺服
- 将肩部旋转伺服连接到肩部提升伺服
- 将降压模块的输入连接到驱动板上的V和G端口
- 将降压模块的输出和驱动板上剩余的D端口连接到肘部伺服
- 将驱动板连接到电源
- 连接到XL330伺服并在Dynamixel Wizard上查看输入电压,然后调整降压模块上的螺丝,直到输入电压为5V
- 不带底座组装手臂
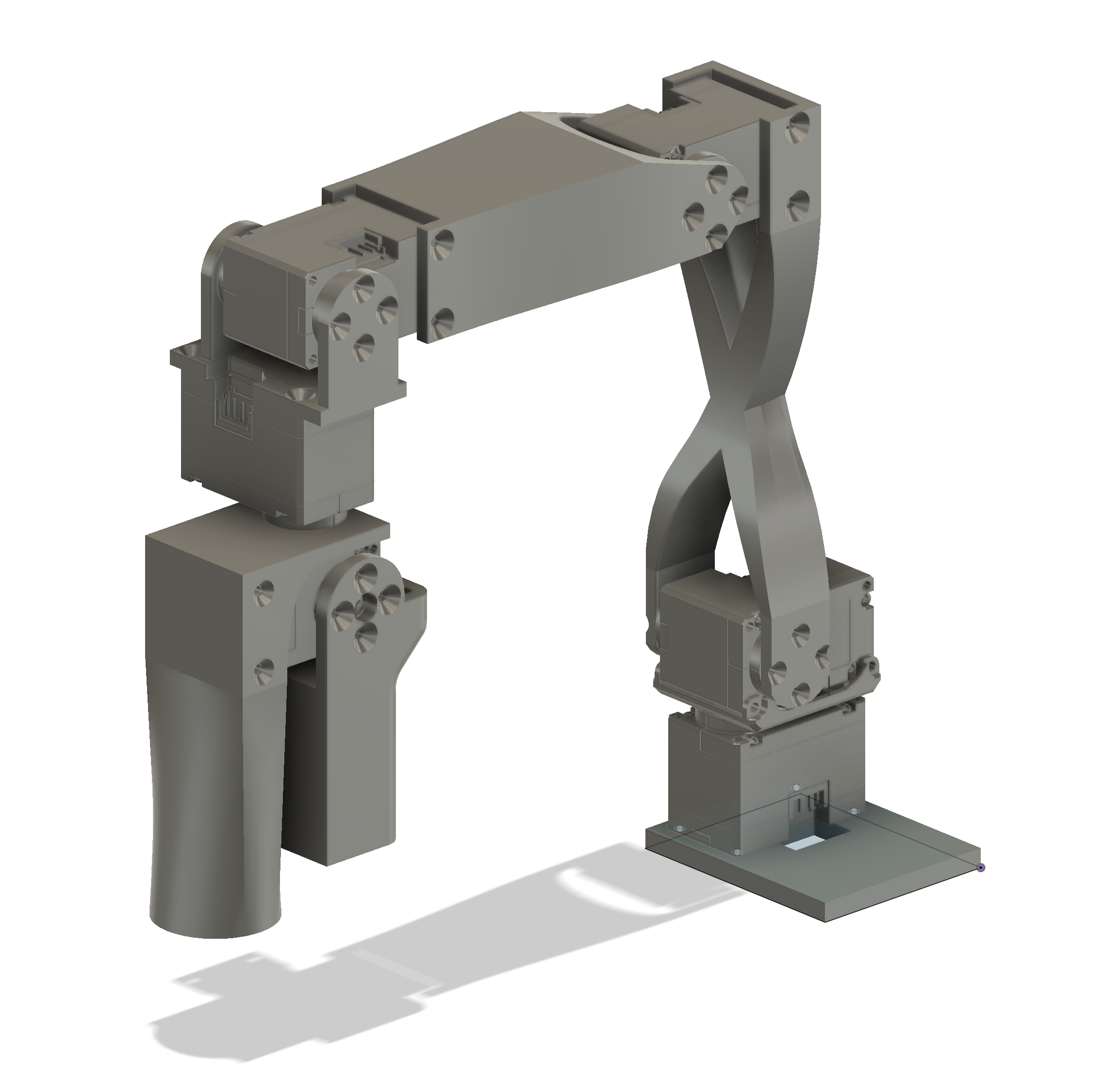
主控臂
所需材料
| 零件 | 成本 | 购买链接 | 规格 |
|---|---|---|---|
| 6个Dynamixel XL330-M077 | 144美元 | https://www.robotis.us/dynamixel-xl330-m077-t/ | https://emanual.robotis.com/docs/en/dxl/x/xl330-m077/ |
| XL330框架 | 7美元 | https://www.robotis.us/fpx330-s101-4pcs-set/ | |
| XL330惰轮 | 10美元 | https://www.robotis.us/fpx330-h101-4pcs-set/ | 注意:四个一包;较长版本(带肘部到手腕延长部分)需要三个,下图所示较短版本需要两个 |
| Waveshare串行总线伺服驱动板 | 10美元 | https://a.co/d/7C3RUYU | |
| 5V电源 | 6美元 | https://a.co/d/5u90NVp | |
| 桌面夹具 | 6美元 | https://a.co/d/4KEiYdV | |
| 总计 | 183美元 |
组装
主控臂的组装更简单,因为所有电机都使用5V。夹持器被替换为手柄和扳机。使用时,可以对扳机施加小扭矩,使其默认打开。GELLO设计使用弹簧来实现这一目的,但组装起来要困难得多。
可以使用teleoperation.py脚本来测试手臂。但是,可能需要调整设备名称。
仿真
通过运行simulation.py可以使用MuJoCo中的基本仿真环境。











