
 访问官网
访问官网 Github
Github 论文
论文以下是源文本的中文翻译:
一种完全开源且紧凑的具有全向视觉感知的航空机器人 OmniNxt
IROS 2024 口头报告
刘培泽、冯忠泽†、徐扬、宁艳、徐昊†和沈绍杰
香港科技大学航空机器人小组
†通讯作者
[arXiv][项目页面][哔哩哔哩视频]
新闻
- [30/06/2024]: OmniNxt 被接受在 IROS 2024 上发表。
- [15/08/2024] V0.1 版本发布
硬件
您可以使用 Fusion360 访问我们最新的设计。
项目链接: https://a360.co/3vK6dJd
访问码: hkustUAV
零件清单
所有组件均可在淘宝购买
| 组件 | 规格 | 链接 |
|---|---|---|
| 四鱼眼相机套件 | ||
| OAK-FFC-4P | 相机控制板 | 官方 / 淘宝 |
| B0335 (OV9782) | 相机模块 (210 度鱼眼镜头) | 官方 / 淘宝 |
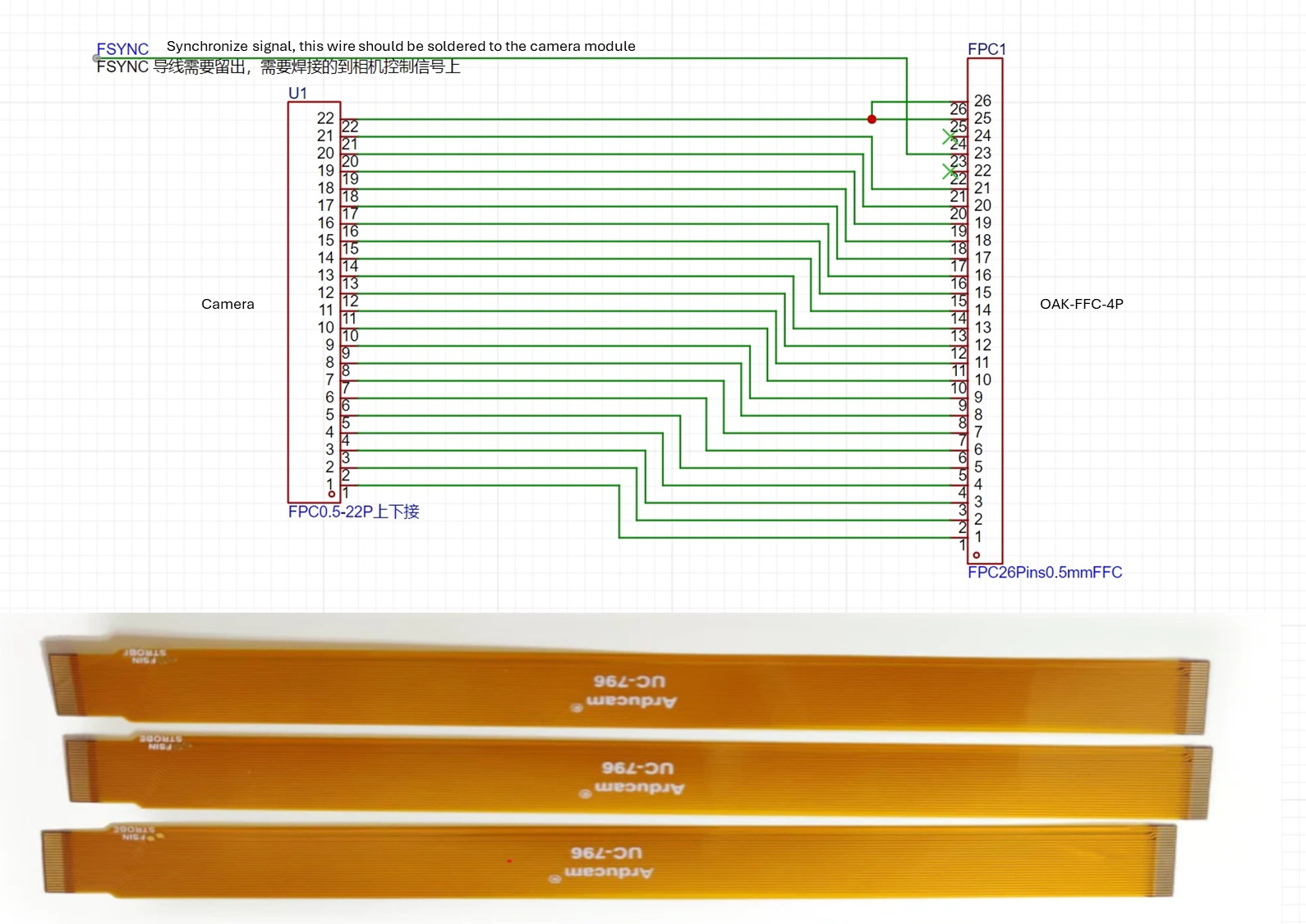
| 相机线缆 | 定制 | 相机线缆原理图 |
| 板载计算机 | ||
| Jetson Orin Nx | ||
| Jetson Orin Nx 载板 | DM | |
| Jetson Orin Nx 散热器 | ||
| Jetson Orin 网卡 | ||
| 2230 固态硬盘 | ||
| Intel AX200 | ||
| 飞行平台 (6S) | ||
| Nxt-FC | 项目页面 | MicoAir / 淘宝 |
| 飞行框架 | 定制 | Fusion360 |
| 保护装置 | 定制 / Oddity RC XI35 保护装置 | Fusion360 / Oddity RC |
| 电机 | 2204 1750KV / 1804 2450KV | |
| 6S 电池 |
相机线缆原理图
系统设置
多鱼眼相机组

相机硬件准备和 ROS 驱动程序, 参见 oak_ffc_4p
校准这个相机组, 参见 quater-calib
Jetson Orin
我们的 Jetson 信息: 这是一份英文到中文的翻译,请参考以下中文版本:
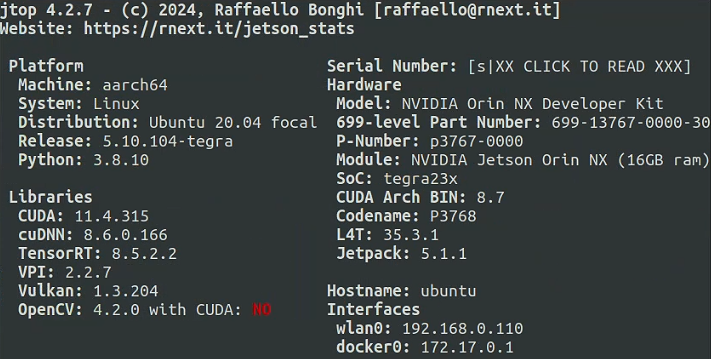
我们建议您遵循以下设置以避免冲突(特别是CUDA和tensorRT)。
Nxt-FC
我们开放了一个硬币大小的基于PX4的飞行控制器,请参考NXT-FC
请按照"设置Nxt-FC"部分来配置您的飞行控制器。
运行环境设置
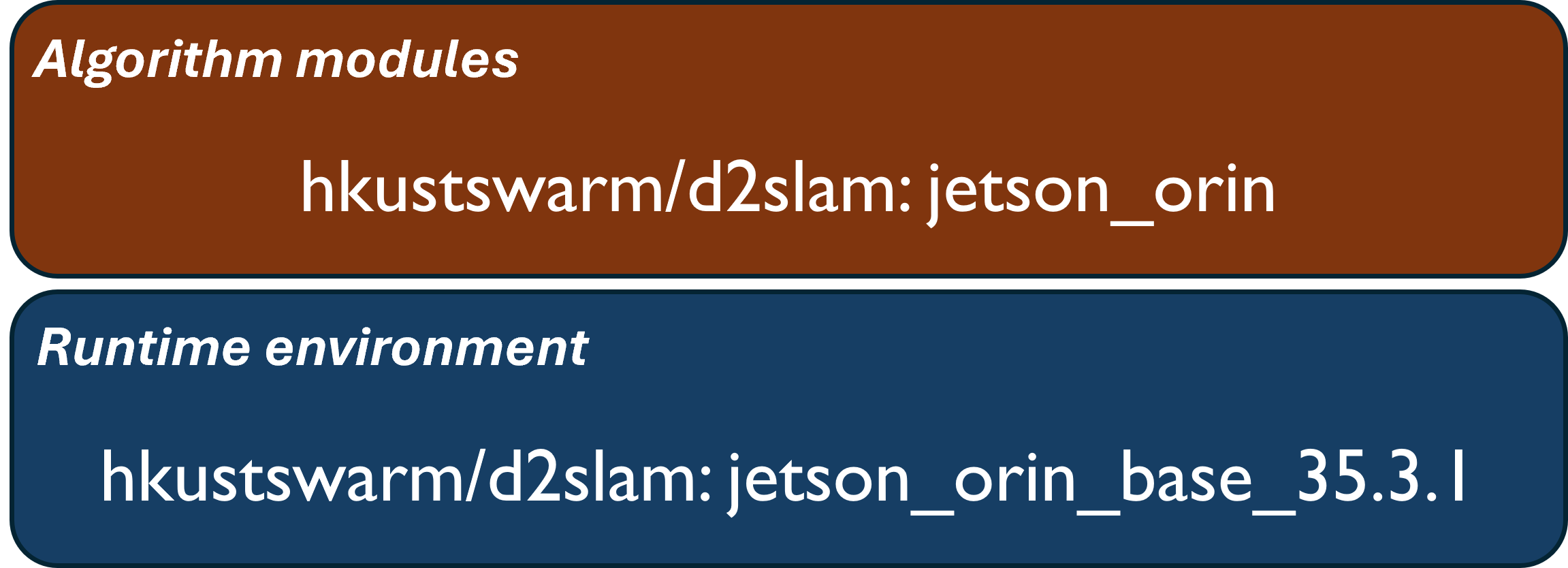
我们的Omni-VINS和Omni-Depth是从D2SLAM开发而来。由于在本地主机(Jetson Orin)上构建Docker镜像通常需要很长时间,我们建议您从Docker Hub拉取这些镜像。
Docker镜像的结构如下:
步骤 1 将仓库克隆到您的本地机器
git clone --branch pr_fix_main https://github.com/HKUST-Aerial-Robotics/D2SLAM.git
步骤 2 按照我们的模板配置您的四相机参数和VINS参数
cd ./D2SLAM/config/quadcam_drone_nxt_tmp
如果您已经校准了您的四个鱼眼相机集,您可以简单地替换同名的文件,包括:
- stereo_calib_n_m_240_320.yaml(n和m是相机编号;用于Omni-Depth)。
- fisheye_cams.yaml(用于Omni-VINS)。
步骤 3 使用您的本地环境配置./start_docker.sh脚本
./start_docker.sh文件在**./D2SLAM**目录下。
使用您本地主机环境下的绝对路径修改以下参数:
- DATA_SET (数据集所在位置)(可选)
然后在D2SLAM目录下运行以下命令(非常重要,这将把您的D2SLAM目录映射到容器中):
./start_docker.sh 1
步骤 4 启动算法模块
同时运行所有算法模块(Omni-VINS和Omni-Depth)
## 您应该在/root/swarm_ws/下
source ./devel/setup.bash
roslaunch d2vins quadcam.laucnh
仅启动Omni-VINS,请移除红框中的节点
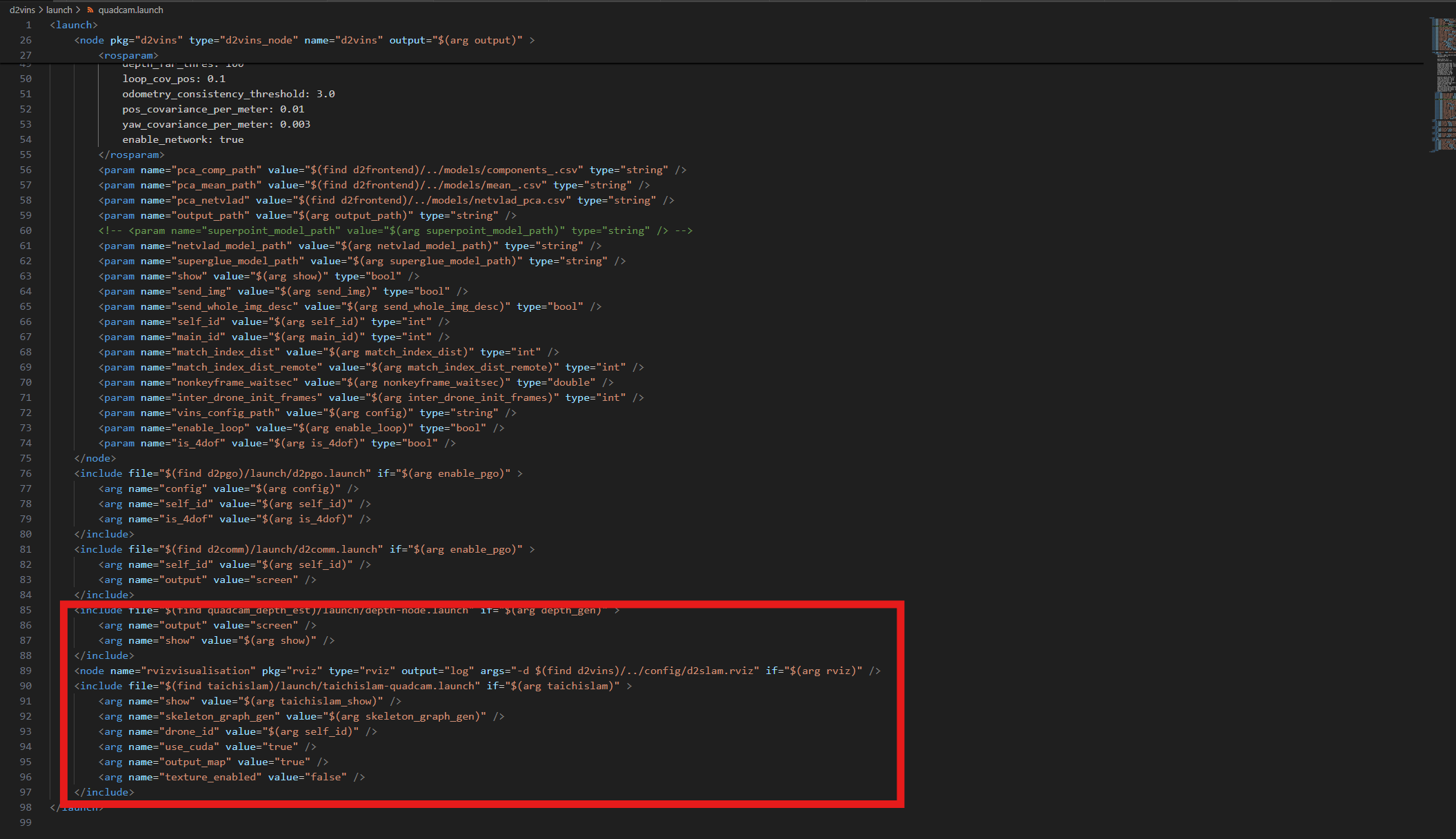
然后
source ./devel/setup.bash
roslaunch d2vins quadcam.laucnh
仅启动Omni-Depth
source ./devel/setup.bash
roslaunch quadcam_depth_est depth-node.launch
[注意]如果您第一次运行Omni-VINS和Omni-Depth,这两个模块的初始化时间会比较长,因为它们需要生成推理引擎。
差不多完成了
如果一切正常,您将看到
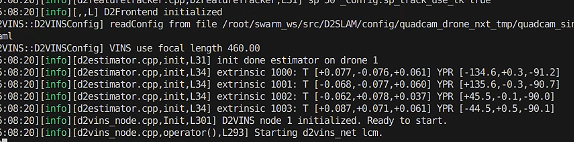
这意味着Omni-VINS(D2VINS)初始化正常。
以及
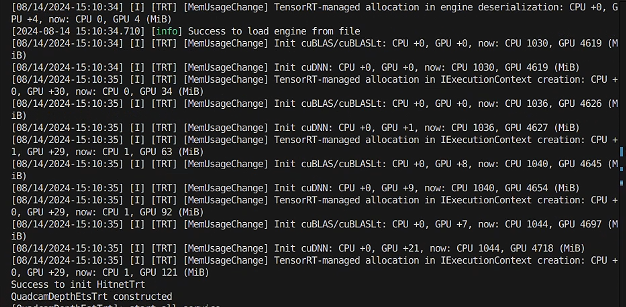
对于Omni-Depth。
其他设置
OmniNxt px4参数:
PX4控制器
我们强烈建议您参考Fast-Lab的PX4控制器PX4-Control
我们也提供了Fast-Lab的PX4控制器的无偏航版本PX4-Control。
如果这些模块对您的研究和项目有用,请引用ZJU-Fast-Lab的工作。
飞行规划器
我们修改了一些ego-planner中的策略。我们的版本在这里ego-planner-omni-modify
如果这些模块对您的研究和项目有用,请引用ZJU-Fast-Lab的ego-planner。











