
 Github
Github 文档
文档 论文
论文描述
该代码在ROS项目中将Velodyne VLP16 3D-Lidar传感器获得的点云投影到RGB相机的图像上。该示例使用ROS包来校准相机和LiDAR,源自lidar_camera_calibration。为了获得更密集的点云,我们通过将点云转换为距离图像,并使用armadillo库进行双线性插值来插值点云数据。
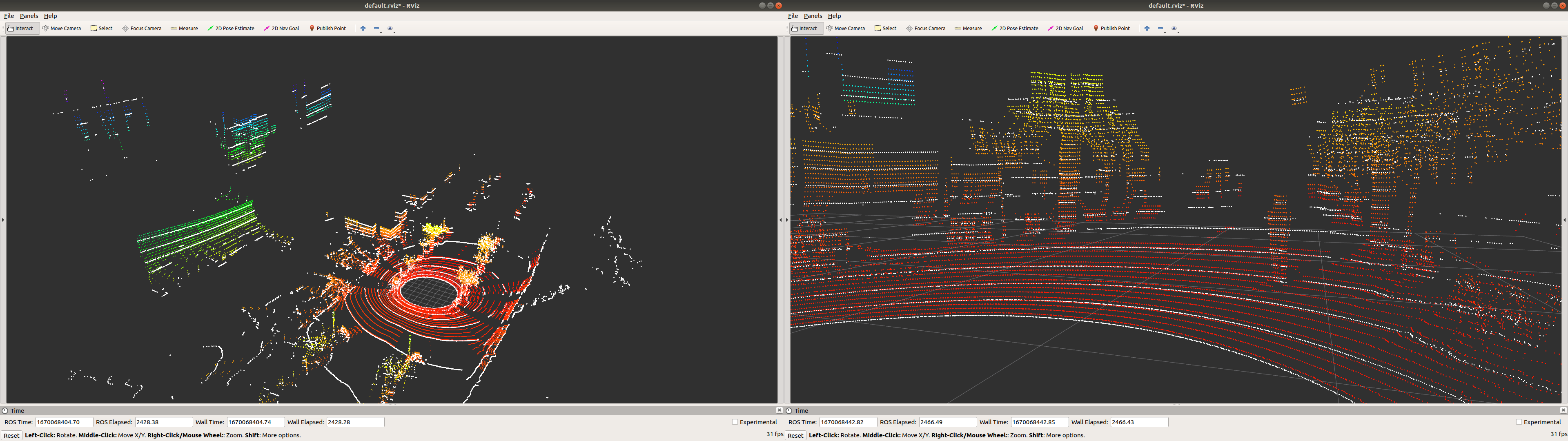
插值点云
白色点是Velodyne VLP-16激光雷达的原始点云。彩色点是插值后的点云。
激光雷达和相机融合
要求
- ROS Melodic 或 Noetic
- Velodyne 仓库
cd ~/(your_work_space)/src git clone https://github.com/ros-drivers/velodyne.git -b melodic-devel cd .. catkin_make --only-pkg-with-deps velodyne - PCL (点云库) (已测试pcl 1.8)
- Armadillo (11.0.1或更高版本)
tar -xvf armadillo-11.1.1.tar.xz cd armadillo-11.1.1 mkdir build cd build cmake .. make sudo make install
话题
订阅话题
~/pointcloudTopic 输入点云消息。(sensor_msgs/PointCloud2)
~/imageTopic 输入图像消息。(sensor_msgs/Image)
发布话题
激光雷达和相机融合
~/points2 输出插值后的点云。(sensor_msgs/PointCloud2) ~/pcOnImage_image 激光雷达点云投影到输入图像上。(sensor_msgs/Image)
插值点云
~/pc_interpoled 输出插值后的点云。(sensor_msgs/PointCloud2)
克隆仓库
cd ~/catkin_ws/src
git clone https://github.com/EPVelasco/lidar_camera_fusion.git
cd ..
catkin_make --only-pkg-with-deps lidar_camera_fusion
ROS启动
你可以使用这个rosbag来测试该仓库。请注意,相机-LiDAR的齐次矩阵存在不准确性。我们正在重新校准相机和LiDAR以减少这个误差。但是,你可以了解该包的工作原理以及它如何融合Realsense D435相机和Velodyne VLP16 LiDAR。
Rosbag播放
rosbag play ~/{your_rosbag path}/cam_lidar00.bag
使用rosbag进行激光雷达和相机融合
roslaunch lidar_camera_fusion vlp16OnImg_offline.launch
使用真实传感器进行激光雷达和相机融合
roslaunch lidar_camera_fusion vlp16OnImg.launch
插值点云
roslaunch lidar_camera_fusion interpolated_vlp16.launch
测试包
激光雷达里程计
已经使用原始点云和插值点云进行了激光雷达里程计实验。你需要安装FLOAM包,建议使用以下分支。 我们准备了一个rosbag用于测试激光雷达里程计和激光雷达插值包。该rosbag是在户外环境中使用Velodyne VLP16生成的闭环。 需要修改launch文件中的话题名称。因此,要使用原始点云运行FLOAM,你需要将话题设为*/velodyne_points*,要使用插值后的激光雷达启动FLOAM,你需要将话题设为*/pc_interpoled*。
启动FLOAM、interpolated_vlp16和rosbag
roslaunch floam floam_experimets.launch
roslaunch lidar_camera_fusion interpolated_vlp16.launch
rosbag play {your/rosbag/file/address}/loop_8.bag
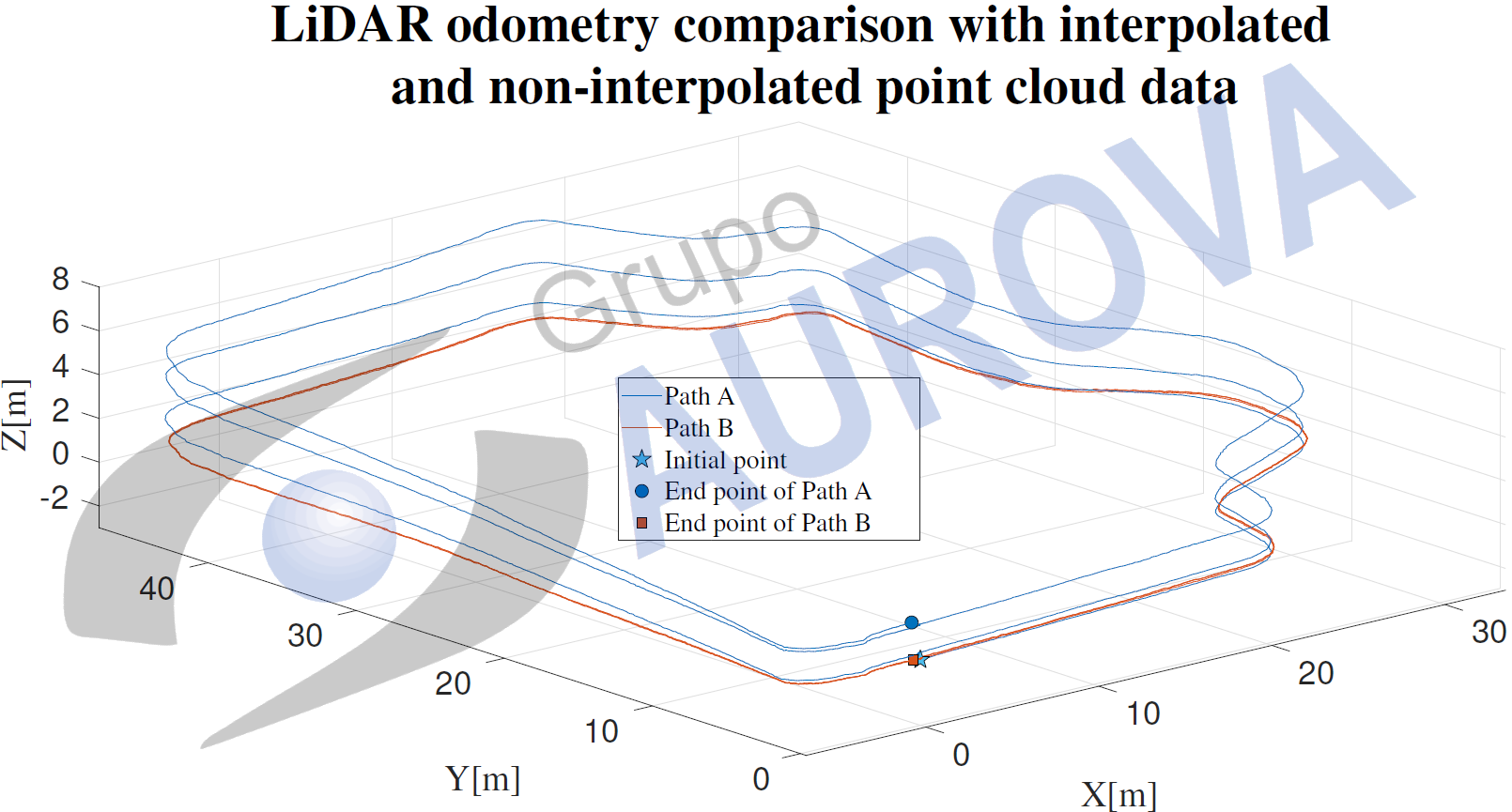
结果
图像显示了使用FLOAM包的里程计结果,其中路径A和B分别由未插值和插值的点云生成。测试是在连续运行rosbag 4次后进行的。
应用
通过传感器融合实现户外环境中家庭垃圾的检测和深度估计。预印本
引用
通过球面距离图像插值进行LiDAR数据增强
@inproceedings{velasco2023lidar,
title={LiDAR data augmentation by interpolation on spherical range image},
author={Velasco-S{\'a}nchez, Edison and de Loyola P{\'a}ez-Ubieta, Ignacio and Candelas, Francisco A and Puente, Santiago T},
booktitle={2023 IEEE 28th International Conference on Emerging Technologies and Factory Automation (ETFA)},
pages={1--4},
year={2023},
organization={IEEE}
}
该方法在深度估计中的应用
@article{paez2022detection,
title={Detection and depth estimation for domestic waste in outdoor environments by sensors fusion},
author={P{\'a}ez-Ubieta, Ignacio de L and Velasco-S{\'a}nchez, Edison and Puente, Santiago T and Candelas, Francisco A},
journal={arXiv preprint arXiv:2211.04085},
year={2022}
}











