
 Github
Github 文档
文档 论文
论文f-BRS: 交互式分割的反向传播优化方法的重新思考 [论文] [PyTorch实现] [MXNet实现] [视频]
本代码库提供了训练和测试最先进的交互式分割模型的代码,是以下论文的官方PyTorch实现:
f-BRS: 交互式分割的反向传播优化方法的重新思考
Konstantin Sofiiuk、Ilia Petrov、Olga Barinova、Anton Konushin
三星研究院
https://arxiv.org/abs/2001.10331
请观看此视频了解我们算法的工作原理:
我们还提供了算法的完整MXNet实现,你可以查看mxnet分支。
新闻
- [2021-02-16] 我们发布了一篇关于交互式分割的新论文(附带代码):利用掩码引导恢复迭代训练以进行交互式分割。这是一种更简单的方法,达到了新的最佳性能,且无需任何测试时优化技术。
环境配置
本框架基于Python 3.6构建,依赖PyTorch 1.4.0+。以下命令可安装所有必要的包:
pip3 install -r requirements.txt
你也可以使用我们的Dockerfile来构建一个配置好环境的容器。
如果你想进行训练或测试,必须在config.yml中配置数据集的路径(SBD用于训练和测试,GrabCut、Berkeley、DAVIS和COCO_MVal仅用于测试)。
交互式分割演示
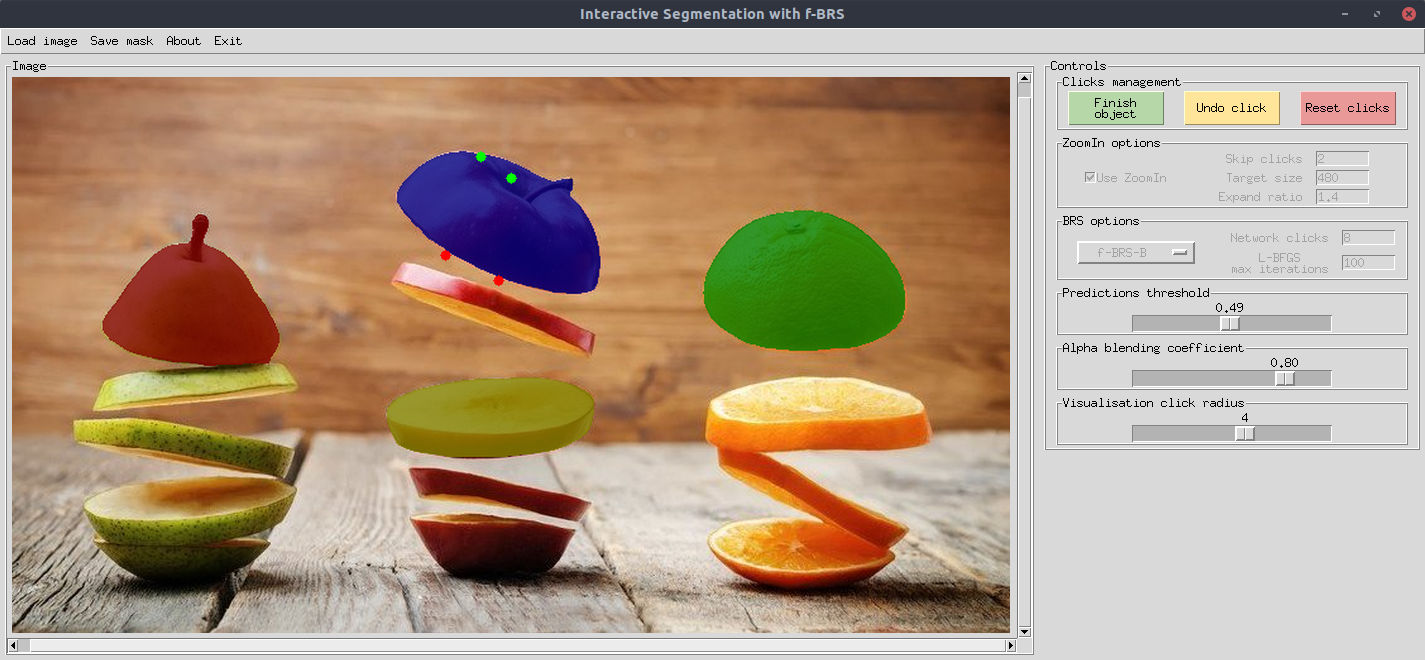
图形界面基于TkInter库及其Python绑定。你可以使用任何提供的模型(见下文预训练模型部分)尝试交互式演示。我们的脚本会自动检测加载模型的架构,只需指定相应检查点的路径即可。
脚本使用示例:
# 此命令在GPU 0上运行交互式演示,使用cfg.INTERACTIVE_MODELS_PATH中的ResNet-34模型
# --checkpoint可以是相对于cfg.INTERACTIVE_MODELS_PATH的路径,也可以是检查点的绝对路径
python3 demo.py --checkpoint=resnet34_dh128_sbd --gpu=0
# 此命令使用/home/demo/fBRS/weights/中的ResNet-34模型运行交互式演示
# 如果你的GPU内存不足,可以减小--limit-longest-size(默认为800)
python3 demo.py --checkpoint=/home/demo/fBRS/weights/resnet34_dh128_sbd --limit-longest-size=400
# 你也可以在仅CPU模式下尝试演示
python3 demo.py --checkpoint=resnet34_dh128_sbd --cpu
你还可以使用Docker镜像运行演示。为此,你需要激活X-host连接,然后使用一些附加标志运行容器:
# 激活xhost
xhost +
docker run -v "$PWD":/tmp/ \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-e DISPLAY=$DISPLAY <已构建的Docker镜像的ID或标签> \
python3 demo.py --checkpoint resnet34_dh128_sbd --cpu
控制方式:
- 按鼠标左键和右键分别进行正面和负面点击;
- 滚轮可放大和缩小;
- 按住鼠标右键并拖动可在图像中移动(也可以使用方向键和WASD);
- 按空格键完成当前对象;
- 打开多个文件时,按左箭头键显示上一张图像,按右箭头键显示下一张图像;
- 使用Ctrl+S保存当前正在编辑的注释("原文件名".png)。
交互式分割选项:
- 放大功能(可通过复选框开启/关闭)
- 跳过点击次数 - 使用放大功能前需要跳过的点击次数。
- 目标尺寸 - 放大裁剪区域会被调整大小,使其较长边与此值匹配(对于大物体可增加此值)。
- 扩展比例 - 物体边界框在裁剪前会按此比例重新缩放。
- BRS参数(可通过下拉菜单更改BRS类型)
- 网络点击次数 - 包含在网络输入中的前几次点击次数。后续的点击仅使用BRS处理(NoBRS忽略此选项)。
- L-BFGS-B最大迭代次数 - BRS中每步优化的最大函数评估次数(增加此值可提高准确度,但每次点击的计算时间会更长)。
- 可视化参数
- 预测阈值 滑块用于调整当前物体概率图的二值化阈值。
- Alpha混合系数 滑块用于调整所有预测掩码的强度。
- 可视化点击半径 滑块用于调整表示点击的红色和绿色圆点大小。
数据集
我们在SBD数据集上训练所有模型,并在GrabCut、Berkeley、DAVIS、SBD和COCO_MVal数据集上评估它们。我们还提供了在COCO和LVIS数据集组合上训练的模型结果。
Berkeley数据集包含100个实例(96张独特图像),由[K. McGuinness, 2010]提供。 我们使用DAVIS数据集中相同的345张图像进行测试,与[WD Jang, 2019]一致,每张图像的真实标注掩码是所有物体掩码的并集。 对于SBD数据集的测试,我们遵循[WD Jang, 2019]的协议,分别对测试集中的每个实例评估我们的算法。
为构建COCO_MVal数据集,我们从COCO 2017验证集中采样800个物体实例。具体来说,我们从80个类别中各采样10个独特实例。唯一的例外是烤面包机类别,在instances_val2017注释中只有9个独特实例。因此,为了得到800个掩码,其中一个类别包含11个物体。我们提供此数据集供下载,以便每个人都能复现我们的结果。
| 数据集 | 描述 | 下载链接 |
|---|---|---|
| SBD | 训练集:8498张图像,20172个实例 测试集:2857张图像,6671个实例 | 官方网站 |
| Grab Cut | 50张图像,每张一个物体 | GrabCut.zip (11 MB) |
| Berkeley | 96张图像,100个实例 | Berkeley.zip (7 MB) |
| DAVIS | 345张图像,每张一个物体 | DAVIS.zip (43 MB) |
| COCO_MVal | 800张图像,800个实例 | COCO_MVal.zip (127 MB) |
下载并解压后,别忘了在config.yml中更改数据集路径。
测试
预训练模型
我们提供了不同骨干网络的交互式分割预训练模型。评估结果与我们论文中的结果有所不同,因为我们在本仓库中展示的新代码基础上重新训练了所有模型。我们大大加速了RGB-BRS算法的推理速度 - 现在在SBD数据集上的运行速度比论文中给出的时间快2.5到4倍。尽管如此,新的结果有时甚至更好。
请注意,所有ResNet模型都是使用MXNet分支训练的,然后转换为PyTorch(它们的结果等效)。我们提供了用于转换模型的脚本。HRNet模型是使用PyTorch训练的。
你可以在下表中找到模型权重和测试结果:
| 骨干网络 | 训练数据集 | 链接 |
|---|---|---|
| ResNet-34 | SBD | resnet34_dh128_sbd.pth (GitHub, 89 MB) |
| ResNet-50 | SBD | resnet50_dh128_sbd.pth (GitHub, 120 MB) |
| ResNet-101 | SBD | resnet101_dh256_sbd.pth (GitHub, 223 MB) |
| HRNetV2-W18+OCR | SBD | hrnet18_ocr64_sbd.pth (GitHub, 39 MB) |
| HRNetV2-W32+OCR | SBD | hrnet32_ocr128_sbd.pth (GitHub, 119 MB) |
| ResNet-50 | COCO+LVIS | resnet50_dh128_lvis.pth (GitHub, 120 MB) |
| HRNetV2-W32+OCR | COCO+LVIS | hrnet32_ocr128_lvis.pth (GitHub, 119 MB) |
| 模型 | BRS 类型 | GrabCut | Berkeley | DAVIS | SBD | COCO_MVal | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| NoC 85% | NoC 90% | NoC 85% | NoC 90% | NoC 85% | NoC 90% | NoC 85% | NoC 90% | NoC 85% | NoC 90% | ||
| ResNet-34 (SBD) | RGB-BRS | 2.04 | 2.50 | 2.22 | 4.49 | 5.34 | 7.91 | 4.19 | 6.83 | 4.16 | 5.52 |
| f-BRS-B | 2.06 | 2.48 | 2.40 | 4.17 | 5.34 | 7.73 | 4.47 | 7.28 | 4.31 | 5.79 | |
| ResNet-50 (SBD) | RGB-BRS | 2.16 | 2.56 | 2.17 | 4.27 | 5.27 | 7.51 | 4.00 | 6.59 | 4.12 | 5.61 |
| f-BRS-B | 2.20 | 2.64 | 2.17 | 4.22 | 5.44 | 7.81 | 4.55 | 7.45 | 4.31 | 6.26 | |
| ResNet-101 (SBD) | RGB-BRS | 2.10 | 2.46 | 2.34 | 3.91 | 5.19 | 7.23 | 3.78 | 6.28 | 3.98 | 5.45 |
| f-BRS-B | 2.30 | 2.68 | 2.61 | 4.22 | 5.32 | 7.35 | 4.20 | 7.10 | 4.11 | 5.91 | |
| HRNet-W18+OCR (SBD) | RGB-BRS | 1.68 | 1.94 | 1.99 | 3.81 | 5.49 | 7.98 | 4.19 | 6.84 | 3.62 | 5.04 |
| f-BRS-B | 1.86 | 2.18 | 2.07 | 3.96 | 5.62 | 8.08 | 4.70 | 7.65 | 3.87 | 5.57 | |
| HRNet-W32+OCR (SBD) | RGB-BRS | 1.80 | 2.16 | 2.00 | 3.58 | 5.40 | 7.59 | 3.87 | 6.33 | 3.61 | 5.12 |
| f-BRS-B | 1.78 | 2.16 | 2.13 | 3.69 | 5.54 | 7.62 | 4.31 | 7.08 | 3.82 | 5.44 | |
| ResNet-50 (COCO+LVIS) | RGB-BRS | 1.54 | 1.76 | 1.56 | 2.70 | 4.93 | 6.22 | 4.04 | 6.85 | 2.41 | 3.47 |
| f-BRS-B | 1.52 | 1.74 | 1.56 | 2.61 | 4.94 | 6.36 | 4.29 | 7.20 | 2.34 | 3.43 | |
| HRNet-W32+OCR (COCO+LVIS) | RGB-BRS | 1.54 | 1.60 | 1.63 | 2.59 | 5.06 | 6.34 | 4.18 | 6.96 | 2.38 | 3.55 |
| f-BRS-B | 1.54 | 1.69 | 1.64 | 2.44 | 5.17 | 6.50 | 4.37 | 7.26 | 2.35 | 3.44 | |
评估
我们提供了脚本来测试所有呈现的模型在GrabCut、Berkeley、DAVIS、COCO_MVal和SBD数据集上的所有可能配置。要测试模型,你应该下载其权重并将其放入./weights文件夹(你可以在config.yml中更改此路径,查看INTERACTIVE_MODELS_PATH变量)。要测试我们的任何模型,只需指定相应检查点的路径。我们的脚本会自动检测加载模型的架构。
以下命令运行模型评估(使用'-h'显示其他选项):
python3 scripts/evaluate_model.py <brs-mode> --checkpoint=<checkpoint-name>
脚本使用示例:
# 此命令在f-BRS-B模式下评估ResNet-34模型在所有数据集上的表现。
python3 scripts/evaluate_model.py f-BRS-B --checkpoint=resnet34_dh128_sbd
# 此命令在f-BRS-B模式下评估HRNetV2-W32+OCR模型在所有数据集上的表现。
python3 scripts/evaluate_model.py f-BRS-B --checkpoint=hrnet32_ocr128_sbd
# 此命令在RGB-BRS模式下评估ResNet-50模型在GrabCut和Berkeley数据集上的表现。
python3 scripts/evaluate_model.py RGB-BRS --checkpoint=resnet50_dh128_sbd --datasets=GrabCut,Berkeley
# 此命令在DistMap-BRS模式下评估ResNet-101模型在DAVIS数据集上的表现。
python3 scripts/evaluate_model.py DistMap-BRS --checkpoint=resnet101_dh256_sbd --datasets=DAVIS
Jupyter notebook

你还可以使用test_any_model.ipynb Jupyter notebook交互式地试验我们的模型。
训练
我们提供了在SBD数据集上训练我们模型的脚本。你可以使用以下命令开始训练:
# ResNet-34模型
python3 train.py models/sbd/r34_dh128.py --gpus=0,1 --workers=4 --exp-name=first-try
# ResNet-50模型
python3 train.py models/sbd/r50_dh128.py --gpus=0,1 --workers=4 --exp-name=first-try
# ResNet-101模型
python3 train.py models/sbd/r101_dh256.py --gpus=0,1,2,3 --workers=6 --exp-name=first-try
# HRNetV2-W32+OCR模型
python3 train.py models/sbd/hrnet32_ocr128.py --gpus=0,1 --workers=4 --exp-name=first-try
对于每个实验,在./experiments中都会创建一个单独的文件夹,其中包含Tensorboard日志、文本日志、可视化和模型检查点。你可以在config.yml中指定另一个路径(参见EXPS_PATH变量)。
请注意,我们在2个GPU上训练了ResNet-34和ResNet-50模型,在4个GPU上训练了ResNet-101模型(我们使用Nvidia Tesla P40进行训练)。如果你打算在不同的GPU配置下训练模型,你需要设置不同的批量大小。你可以使用命令行参数--batch-size指定批量大小,或在模型脚本中更改默认值。
我们使用了来自官方仓库的预训练HRNetV2模型。如果你想使用这些模型进行交互式分割训练,你需要下载权重并在config.yml中指定它们的路径。
许可证
代码以MPL 2.0许可证发布。MPL是一个易于遵守的copyleft许可证。你必须根据MPL提供你所做任何更改的源代码,但你可以将MPL软件与专有代码结合,只要你将MPL代码保存在单独的文件中。
引用
如果您发现本工作对您的研究有用,请引用我们的论文:
@inproceedings{fbrs2020,
title={f-brs: 重新思考用于交互式分割的反向传播细化},
author={索菲乌克,康斯坦丁 和 彼得罗夫,伊利亚 和 巴里诺娃,奥尔加 和 科努申,安东},
booktitle={IEEE/CVF计算机视觉与模式识别会议论文集},
pages={8623--8632},
year={2020}
}











