
 Github
Github 论文
论文AdelaiDepth

AdelaiDepth是一个用于单目深度预测的开源工具箱。我们团队的相关工作在此开源。
AdelaiDepth包含以下算法:
- 3D场景形状(最佳论文入围者):代码,从单张图像中学习恢复3D场景形状
- DiverseDepth:代码,虚拟法线:为准确和稳健的深度预测实施几何约束,DiverseDepth:使用多样化数据的仿射不变深度预测
- 虚拟法线:代码,为深度预测实施虚拟法线的几何约束
- 使用深度卷积神经场的深度估计:代码,从单目图像中使用深度卷积神经场学习深度,TPAMI'16,CVPR'15
新闻:
- [2022年5月31日] LeReS项目的训练代码和数据已发布。
- [2022年2月13日] DiverseDepth项目的训练代码和数据已发布。
- [2021年6月13日] 我们的"从单张图像中学习恢复3D场景形状"工作是CVPR'21最佳论文入围者之一。
- [2021年6月6日] 我们已经公开了DiverseDepth的训练数据。
结果和数据集示例:
- 3D场景形状
您可以查看这个视频,它对这项工作进行了非常简短的介绍:
| RGB | 深度 | 点云 |
 |  |  |
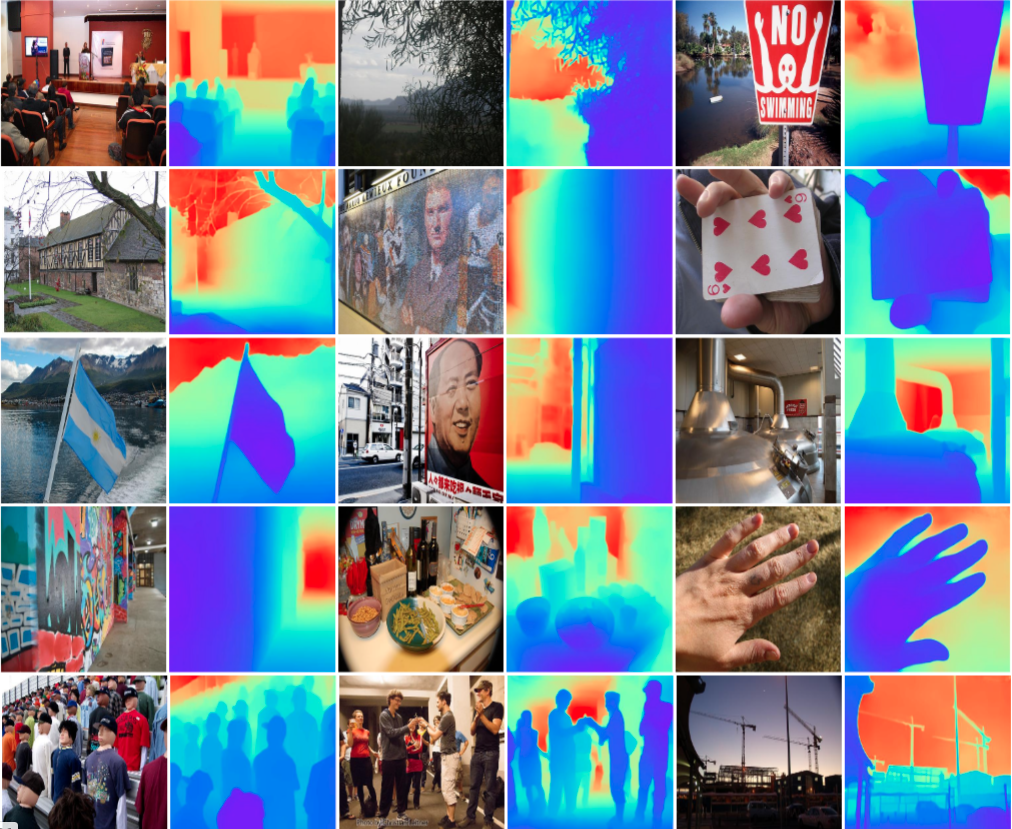
- DiverseDepth
- 结果示例:
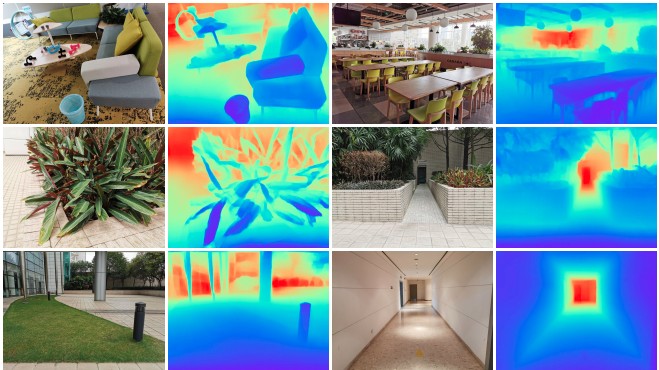
- DiverseDepth数据集示例:

BibTeX
@article{yin2022towards,
title={Towards Accurate Reconstruction of 3D Scene Shape from A Single Monocular Image},
author={Yin, Wei and Zhang, Jianming and Wang, Oliver and Niklaus, Simon and Chen, Simon and Liu, Yifan and Shen, Chunhua},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)},
year={2022}
}
@inproceedings{Yin2019enforcing,
title = {Enforcing geometric constraints of virtual normal for depth prediction},
author = {Yin, Wei and Liu, Yifan and Shen, Chunhua and Yan, Youliang},
booktitle = {The IEEE International Conference on Computer Vision (ICCV)},
year = {2019}
}
@inproceedings{Wei2021CVPR,
title = {Learning to Recover 3D Scene Shape from a Single Image},
author = {Wei Yin and Jianming Zhang and Oliver Wang and Simon Niklaus and Long Mai and Simon Chen and Chunhua Shen},
booktitle = {Proc. IEEE Conf. Comp. Vis. Patt. Recogn. (CVPR)},
year = {2021}
}
@article{yin2021virtual,
title = {Virtual Normal: Enforcing Geometric Constraints for Accurate and Robust Depth Prediction},
author = {Yin, Wei and Liu, Yifan and Shen, Chunhua},
journal = {IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI)},
year = {2021}
}
许可证
3D场景形状代码受Adobe Research的非商业许可证限制。详情请参阅LICENSE文件。
其他深度预测项目根据2条款BSD许可证授权用于非商业用途 -- 详情请参阅LICENSE文件。对于商业用途,请联系Chunhua Shen。











