
 访问官网
访问官网 Github
Github 文档
文档 论文
论文






金牌赞助商:Greenzie
PlotJuggler 3.9
PlotJuggler是一款快速、强大且直观的时间序列可视化工具。
值得注意的特性:
- 简单的拖放式用户界面。
- 从文件加载数据。
- 连接到实时数据流。
- 保存可视化布局和配置以便日后重复使用。
- 快速的OpenGL可视化。
- 可处理数千个时间序列和数百万个数据点。
- 使用简单的编辑器转换数据:导数、移动平均、积分等...
- PlotJuggler可以通过插件轻松扩展。
数据源(文件和流式)
- 加载CSV文件。
- 加载ULog(PX4)。
- 订阅多种不同的流式数据源:MQTT、WebSockets、ZeroMQ、UDP等。
- 理解JSON、CBOR、BSON、Message Pack等数据格式。
- 与ROS良好集成:打开rosbags和/或订阅ROS主题(ROS1和ROS2都支持)。
- 支持Lab Streaming Layer,该协议被许多设备使用。
- 轻松添加自定义数据源和/或格式...

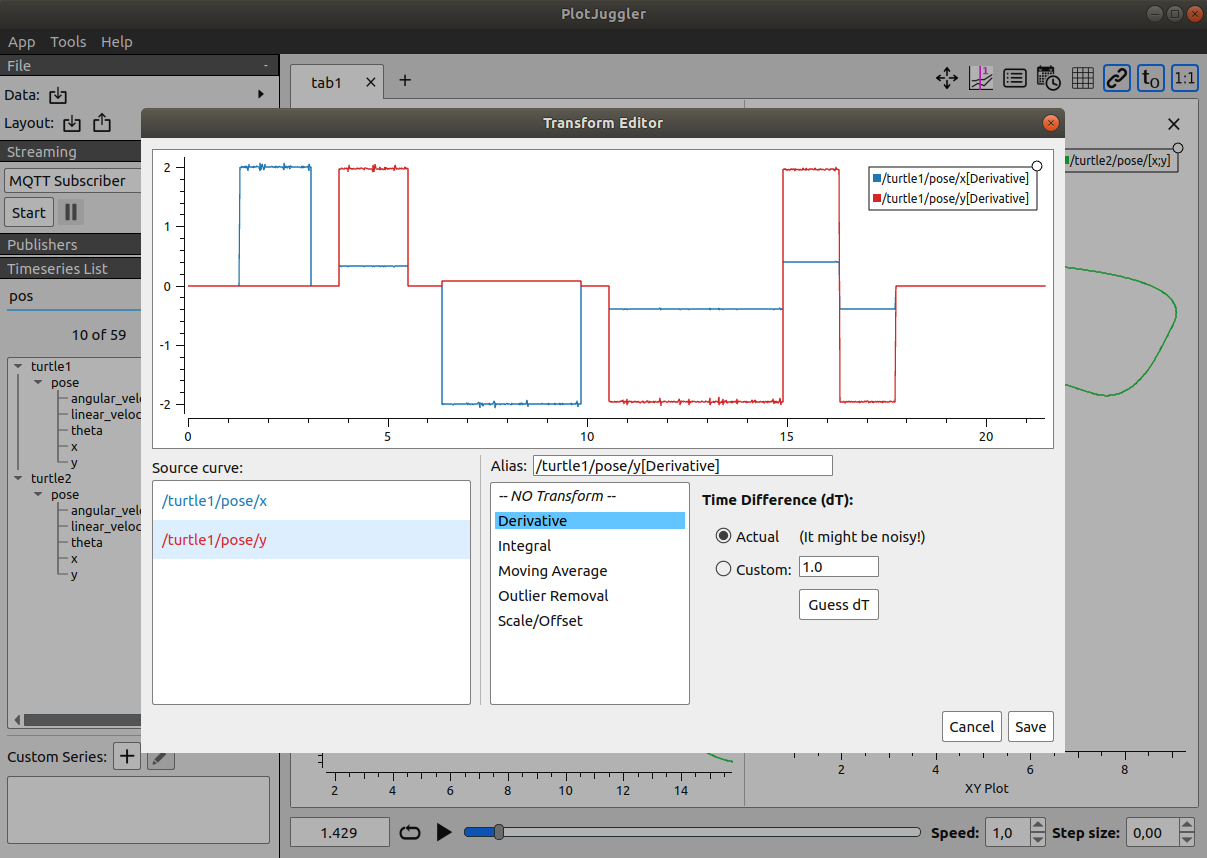
转换和分析数据
PlotJuggler不仅可以轻松可视化数据,还可以分析数据。 您可以使用简单且可扩展的转换编辑器操作时间序列。
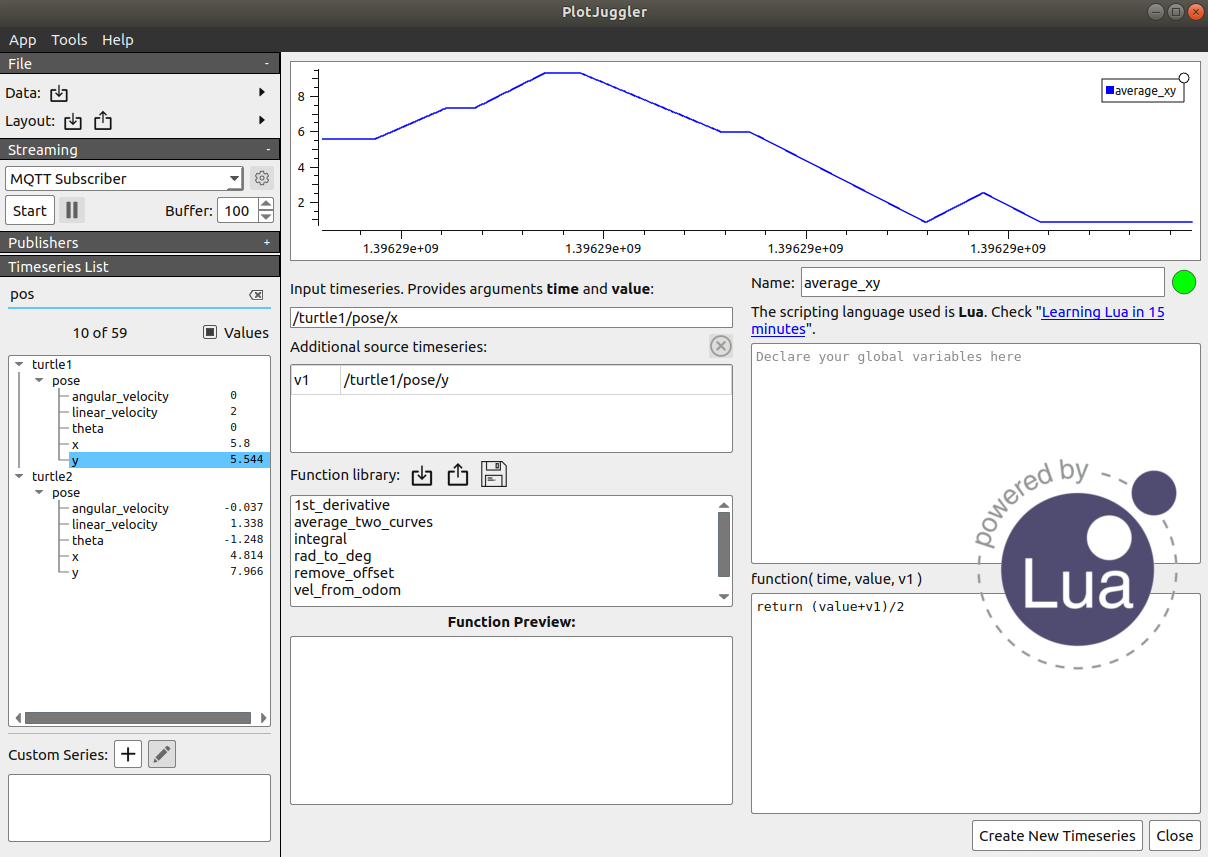
或者,您可以使用自定义函数编辑器,它允许您使用基于Lua的脚本语言创建多输入/单输出函数。
如果您不熟悉Lua,不用担心,您只需5分钟就能学会 ;)
教程
要学习如何使用PlotJuggler,请查看以下教程:
| 教程 1 | 教程 2 | 教程 3 |
|---|---|---|
 |  |  |
支持的插件
一些插件可以在不同的仓库中找到。各个README文件应该包含编译和使用插件所需的所有信息。
请在相关的Github仓库中提交具体问题、拉取请求和问题:
如果你想要一个简单的例子来学习如何编写自己的插件,可以看看PlotJuggler/plotjuggler-sample-plugins
安装
Snap(推荐在Ubuntu中使用,也适用于ROS用户)
snap包含一个可以与ROS1或ROS2一起使用的PlotJuggler版本。

要在Ubuntu 22.04中安装并支持ROS2,请运行:
sudo snap install plotjuggler
如果你仍在使用ROS1(Ubuntu 20.04),请改为安装:
sudo snap install plotjuggler-ros
Windows二进制安装程序
此安装程序不包含ROS插件。
Windows安装程序: PlotJuggler-Windows-3.9.0-installer
ROS用户的Debian软件包
使用以下命令安装ROS软件包:
sudo apt install ros-$ROS_DISTRO-plotjuggler-ros
要在ROS上启动PlotJuggler,使用以下命令:
rosrun plotjuggler plotjuggler
或者,如果你使用的是ROS2:
ros2 run plotjuggler plotjuggler
ROS插件在单独的仓库中提供:https://github.com/PlotJuggler/plotjuggler-ros-plugins
如果你想从源代码编译PJ及其ROS插件,请查看该仓库中的说明。
从源代码编译
你可以在这里找到详细说明:COMPILE.md。
赞助和商业支持
PlotJuggler的开发和维护需要大量工作;我的目标是构建最直观和强大的数据和时间序列可视化工具。
如果你觉得PlotJuggler有用,可以考虑通过PayPal捐赠或成为Github赞助商。
如果你需要扩展PlotJuggler的任何功能以满足特定需求或解析自定义数据格式,你可以从主要作者Davide Faconti获得商业支持。
许可证
PlotJuggler根据Mozilla公共许可证版本2.0发布,允许用户开发闭源插件。
请注意,一些第三方依赖项(包括Qt)使用GNU较宽松通用公共许可证。











