
 访问官网
访问官网 Github
Github 文档
文档 论文
论文WarpDrive:在GPU上实现极快的端到端单代理或多代理深度强化学习
WarpDrive是一个灵活、轻量级且易于使用的开源强化学习(RL)框架,可在单个或多个GPU(图形处理单元)上实现端到端多代理RL。
利用GPU的极致并行能力,WarpDrive 能够实现比CPU模拟+GPU模型实现快几个数量级的RL。它非常高效,因为它避免了CPU和GPU之间的来回数据复制,并能跨多个代理和多个环境副本并行运行模拟。这些共同使用户能够运行数千甚至数百万个并发模拟,并在极大规模的经验批次上进行训练,实现比基于CPU的对应方案至少100倍的吞吐量。
下表直观展示了Warpdrive的主要特性和在各个维度上的可扩展性。
| 支持 | 并发性 | 版本 | |
|---|---|---|---|
| 环境 | 单个 ✅ 多个 ✅ | 每GPU 1至1000个 | 1.0+ |
| 代理 | 单个 ✅ 多个 ✅ | 每环境1至1024个 | 1.0+ |
| 代理 | 跨块多个 ✅ | 每块1024个 | 1.6+ |
| 离散动作 | 单个 ✅ 多个 ✅ | - | 1.0+ |
| 连续动作 | 单个 ✅ 多个 ✅ | - | 2.7+ |
| 在线策略梯度 | A2C ✅ PPO ✅ | - | 1.0+ |
| 离线策略梯度 | DDPG ✅ | - | 2.7+ |
| 自动缩放 | ✅ | - | 1.3+ |
| 分布式模拟 | 1 GPU ✅ 2-16 GPU节点 ✅ | - | 1.4+ |
| 环境后端 | CUDA C ✅ | - | 1.0+ |
| 环境后端 | CUDA C ✅ Numba ✅ | - | 2.0+ |
| 训练后端 | Pytorch ✅ | - | 1.0+ |
环境
- "捉迷藏"游戏:在"捉迷藏"游戏中,追捕者试图追赶并标记逃跑者。这些游戏相当复杂,适合用于基准测试和测试,涉及线程同步、共享内存、数千个交互代理的高维索引等。下面我们展示了使用WarpDrive为不同追捕者:逃跑者速度比训练的多代理RL策略。这些环境可以在单个GPU上以每秒数百万步的速度运行,并在仅仅几个小时内完成训练!
- 基于WarpDrive开发了复杂的两级多代理环境,如新冠疫情环境和气候变化环境,您可以在真实世界问题和合作中查看示例。
- 经典控制:我们包含了[gym.classic_control](https://github.com/salesforce/warp-drive/blob/master/ https://github.com/openai/gym/tree/master/gym/envs/classic_control)中的环境。在WarpDrive中,单代理是多代理环境的特殊情况。由于每个环境只有一个代理,可扩展性更高。
- 催化反应路径:我们包含了将量子密度泛函理论转换为强化学习表示的环境,使得能够从嘈杂的化学系统中自动搜索最优化学反应路径。您可以在真实世界问题和合作中查看示例。
吞吐量、可扩展性和收敛性
多代理
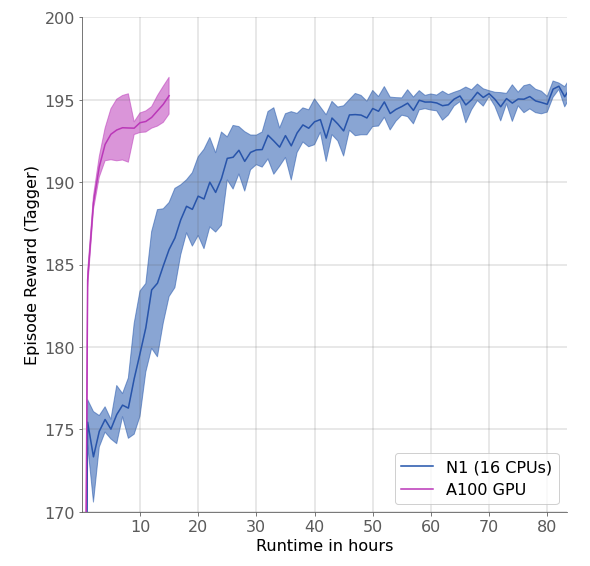
下面,我们比较了在N1 16-CPU节点和单个A100 GPU(使用WarpDrive)上的训练速度,环境为100名逃跑者和5名追捕者的捉迷藏游戏。在相同的环境配置和训练参数下,使用GPU上的WarpDrive比CPU快约10倍。两种情况都并行运行60个环境副本。在CPU节点上使用更多环境是不可行的,因为数据复制会变得过于昂贵。使用WarpDrive,可以将环境副本数量至少增加10倍,实现更快的训练。
单代理
下面,我们比较了在单个A100 GPU(使用WarpDrive)上的训练速度,分别针对(上)Cartpole-v1和(下)Acrobot-v1,并行运行10、100、1K和10K个环境副本,训练3000个周期(超参数相同)。您可以看到通过WarpDrive扩展的大量环境实现了惊人的收敛性和速度。
代码结构
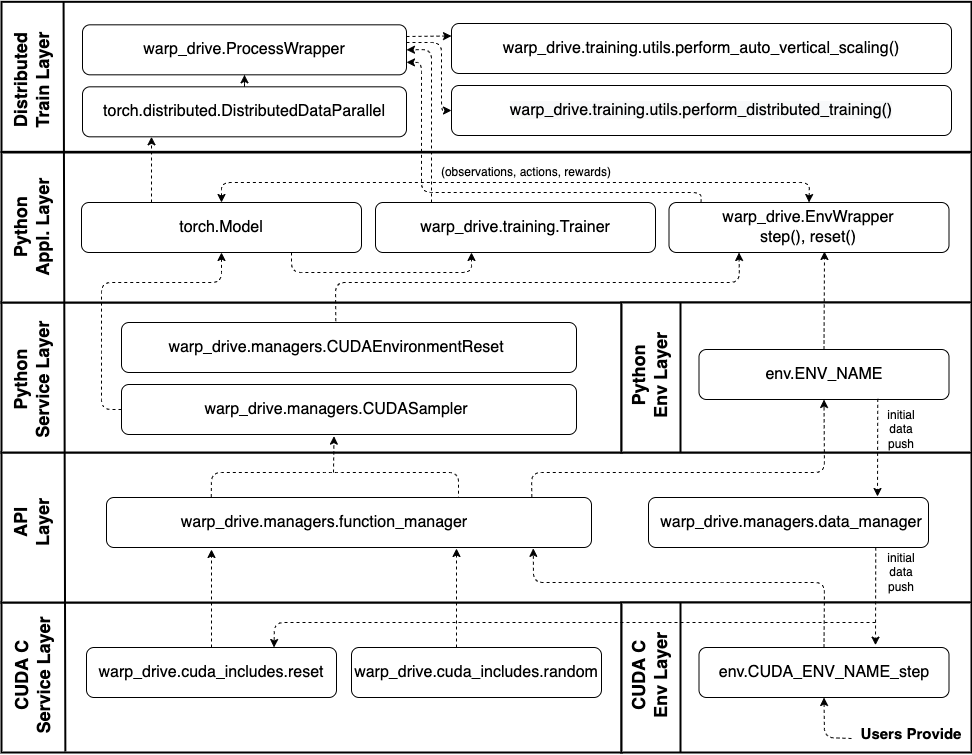
WarpDrive提供了CUDA(或Numba)+ Python框架和便利工具,使您能够快速构建快速、灵活且大规模分布式的多代理RL系统。下图从底层到顶层说明了WarpDrive的设计和组件概览。用户只需在CUDA环境层编写CUDA或Numba步进函数,而其余部分是纯Python接口。我们提供了循序渐进的教程,帮助您掌握工作流程。
Python接口
WarpDrive提供了工具,只需几行代码就能快速构建和训练多代理RL系统。 以下是一个简短示例,用于训练追捕者和逃跑者代理:
# 通过EnvWrapper创建一个包装的环境对象
# 确保env_backend设置为'pycuda'或'numba'(以便在GPU上运行)
env_wrapper = EnvWrapper(
TagContinuous(**run_config["env"]),
num_envs=run_config["trainer"]["num_envs"],
env_backend="pycuda"
)
# 代理可以共享策略模型:此字典将策略模型名称映射到代理ID。
policy_tag_to_agent_id_map = {
"tagger": list(env_wrapper.env.taggers),
"runner": list(env_wrapper.env.runners),
}
# 创建训练器对象
trainer = Trainer(
env_wrapper=env_wrapper,
config=run_config,
policy_tag_to_agent_id_map=policy_tag_to_agent_id_map,
)
# 开始训练!
trainer.train()
论文和引用 WarpDrive
我们的论文发表在《机器学习研究杂志》(JMLR) https://jmlr.org/papers/v23/22-0185.html。您也可以在我们的白皮书中找到更多详细信息:https://arxiv.org/abs/2108.13976。
如果您在研究或应用中使用 WarpDrive,请使用以下 BibTeX 进行引用:
@article{JMLR:v23:22-0185,
author = {Tian Lan and Sunil Srinivasa and Huan Wang and Stephan Zheng},
title = {WarpDrive: Fast End-to-End Deep Multi-Agent Reinforcement Learning on a GPU},
journal = {Journal of Machine Learning Research},
year = {2022},
volume = {23},
number = {316},
pages = {1--6},
url = {http://jmlr.org/papers/v23/22-0185.html}
}
@misc{lan2021warpdrive,
title={WarpDrive: Extremely Fast End-to-End Deep Multi-Agent Reinforcement Learning on a GPU},
author={Tian Lan and Sunil Srinivasa and Huan Wang and Caiming Xiong and Silvio Savarese and Stephan Zheng},
year={2021},
eprint={2108.13976},
archivePrefix={arXiv},
primaryClass={cs.LG}
}
教程和快速入门
教程
通过在 Colab 或 NGC 容器上运行这些教程来熟悉 WarpDrive!
- WarpDrive 基础知识(介绍和 PyCUDA)
- WarpDrive 基础知识(Numba)
- WarpDrive 采样器(PyCUDA)
- WarpDrive 采样器(Numba)
- WarpDrive 重置器和日志记录器
- 创建自定义环境 (PyCUDA)
- 创建自定义环境 (Numba)
- 使用 WarpDrive 进行训练
- 使用 WarpDrive 扩展训练
- 使用 WarpDrive + Pytorch Lightning 进行训练
您也可以在本地运行这些教程,但您需要安装了 nvcc 编译器的 GPU 机器 和兼容的 Nvidia GPU 驱动程序。您还需要安装 Jupyter。 有关安装说明,请参阅 https://jupyter.readthedocs.io/en/latest/install.html
示例训练脚本
我们提供了一些示例脚本,供您快速开始端到端训练。 例如,如果您想使用 2 个 GPU 和 CUDA C 后端训练 tag_continuous 环境(10 个标记器和 100 个跑步者)
python example_training_script_pycuda.py -e tag_continuous -n 2
或者切换到 JIT 编译的 Numba 后端,使用 1 个 GPU
python example_training_script_numba.py -e tag_continuous
您可以在这里找到完整的参考文档。
实际问题和合作
- 使用 WarpDrive 的 AI 经济学家 Covid 环境:我们使用 AI-Economist Foundation 训练两级多代理经济模拟,并使用 WarpDrive 进行训练。在这个例子中,我们特别考虑了 COVID-19 和经济模拟。
- 基于第一性原理的高通量强化学习:我们将量子密度泛函理论转换为强化学习表示,并实现了从嘈杂的化学系统中自动搜索最佳化学反应路径。有关更多详细信息,请查看我们发表在 Nature Communications 上的工作。
- 气候变化合作竞争与 Mila 合作。我们提供了 RICE(区域综合气候环境)模拟环境的基础版本。
- 使用 WarpDrive 的 Pytorch Lightning 训练器:我们提供了一个教程示例和一篇博客文章,介绍了使用 WarpDrive 和 Pytorch Lightning 的多代理强化学习训练循环。
- NVIDIA NGC 目录和快速部署到 VertexAI:WarpDrive 镜像由 NGC 目录托管。NGC 目录"托管顶级 AI 和数据科学软件的容器,经过 NVIDIA 的调优、测试和优化"。我们的教程还支持快速部署到 NGC 支持的 VertexAI。
安装说明
要开始使用,您需要安装 Python 3.7+ 和 nvcc 编译器, 并有兼容的 Nvidia GPU CUDA 驱动程序。
可以按照 Nvidia 的说明在此处安装 CUDA(包括 nvcc):https://developer.nvidia.com/cuda-downloads。
Docker 镜像
V100 GPU:您可以参考 示例 Dockerfile 来配置您的系统。 A100 GPU:我们的最新镜像由NVIDIA NGC发布和维护。我们建议您从NGC目录下载最新镜像。
如果您想构建自定义环境,我们建议您访问Nvidia Docker Hub下载与您系统兼容的CUDA和cuDNN镜像。 您应该能够使用命令行工具来监控系统中的NVIDIA GPU设备:
nvidia-smi
并看到类似这样的输出
+-----------------------------------------------------------------------------+
| NVIDIA-SMI 450.51.06 Driver Version: 450.51.06 CUDA Version: 11.0 |
|-------------------------------+----------------------+----------------------+
| GPU Name Persistence-M| Bus-Id Disp.A | Volatile Uncorr. ECC |
| Fan Temp Perf Pwr:Usage/Cap| Memory-Usage | GPU-Util Compute M. |
| | | MIG M. |
|===============================+======================+======================|
| 0 Tesla V100-SXM2... Off | 00000000:00:04.0 Off | 0 |
| N/A 37C P0 32W / 300W | 0MiB / 16160MiB | 0% Default |
| | | N/A |
+-------------------------------+----------------------+----------------------+
+-----------------------------------------------------------------------------+
| Processes: |
| GPU GI CI PID Type Process name GPU Memory |
| ID ID Usage |
|=============================================================================|
| No running processes found |
+-----------------------------------------------------------------------------+
在这个快照中,您可以看到我们正在使用Tesla V100 GPU和CUDA版本11.0。
使用Pip安装
您可以使用Python包管理器安装WarpDrive:
pip install rl_warp_drive
从源代码安装
-
将此仓库克隆到您的机器上:
git clone https://www.github.com/salesforce/warp-drive -
可选,但建议首次尝试时使用: 创建一个新的conda环境(下面命名为"warp_drive")并激活它:
conda create --name warp_drive python=3.7 --yes conda activate warp_drive -
作为可编辑的Python包安装:
cd warp_drive pip install -e .
测试您的安装
您可以直接从Python命令调用来测试所有模块和端到端训练工作流。
python warp_drive/utils/unittests/run_unittests_pycuda.py
python warp_drive/utils/unittests/run_unittests_numba.py
python warp_drive/utils/unittests/run_trainer_tests.py
了解更多
如果您对扩展此框架感兴趣,或有任何问题,请使用此邀请链接加入AI Economist Slack频道。











