
 Github
Github 论文
论文Segment Anything 3D
- 作者:Yunhan Yang、Xiaoyang Wu、Tong He、Hengshuang Zhao、Xihui Liu
- 机构:上海人工智能实验室、香港大学
- 技术报告:[arxiv]
我们通过将2D图像的分割信息转移到3D空间,将Segment Anything扩展到3D感知领域。我们期望分割信息能够有助于3D传统感知和开放世界感知。该项目仍在进行中,并将被嵌入到我们的感知代码库Pointcept中。我们非常欢迎任何问题或拉取请求。
结果
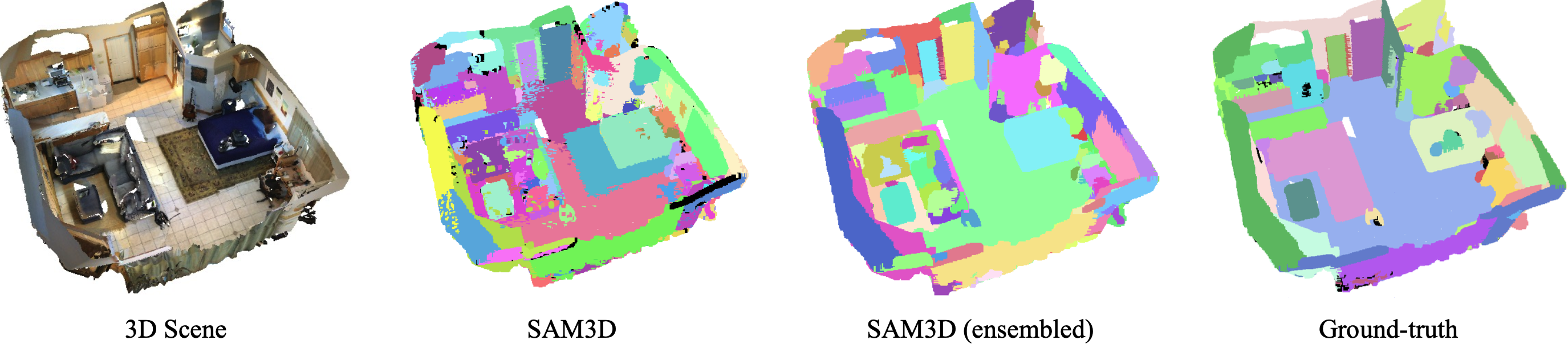 示例网格可在此处获取。
示例网格可在此处获取。
安装
conda create -n sam3d python=3.8 -y
conda activate sam3d
# 在此选择你想要的版本:https://pytorch.org/get-started/previous-versions/
conda install pytorch==1.11.0 torchvision==0.12.0 torchaudio==0.11.0 cudatoolkit=11.3 -c pytorch
conda install plyfile -c conda-forge -y
pip install scikit-image opencv-python open3d imageio
pip install git+https://github.com/facebookresearch/segment-anything.git
cd libs/pointops
# 常规
python setup.py install
# docker和多GPU架构
TORCH_CUDA_ARCH_LIST="ARCH LIST" python setup.py install
# 例如 7.5: RTX 3000; 8.0: a100 更多信息请参见:https://developer.nvidia.com/cuda-gpus
TORCH_CUDA_ARCH_LIST="7.5 8.0" python setup.py install
cd ../..
数据准备
ScanNet v2
下载ScanNet v2数据集。
按如下步骤运行原始ScanNet的预处理代码:
- 准备点云数据(遵循Pointcept)
# RAW_SCANNET_DIR:下载的ScanNet v2原始数据集目录。
# PROCESSED_SCANNET_DIR:处理后的ScanNet数据集目录(输出目录)。
python scannet-preprocess/preprocess_scannet.py --dataset_root ${RAW_SCANNET_DIR} --output_root ${PROCESSED_SCANNET_DIR}
- 准备RGBD数据(遵循BPNet)
python scannet-preprocess/prepare_2d_data/prepare_2d_data.py --scannet_path data/scannetv2 --output_path data/scannetv2_images --export_label_images
开始使用
请通过sam3d.py尝试
# RGB_PATH:rgb数据的路径
# DATA_PATH:点云数据的路径
# SAVE_PATH:保存pcd结果的位置
# SAVE_2DMASK_PATH:保存SAM生成的2D分割结果的位置
# SAM_CHECKPOINT_PATH:SAM检查点的路径
python sam3d.py --rgb_path $RGB_PATH --data_path $DATA_PATH --save_path $SAVE_PATH --save_2dmask_path $SAVE_2DMASK_PATH --sam_checkpoint_path $SAM_CHECKPOINT_PATH
流程
我们的SAM3D流程如下:
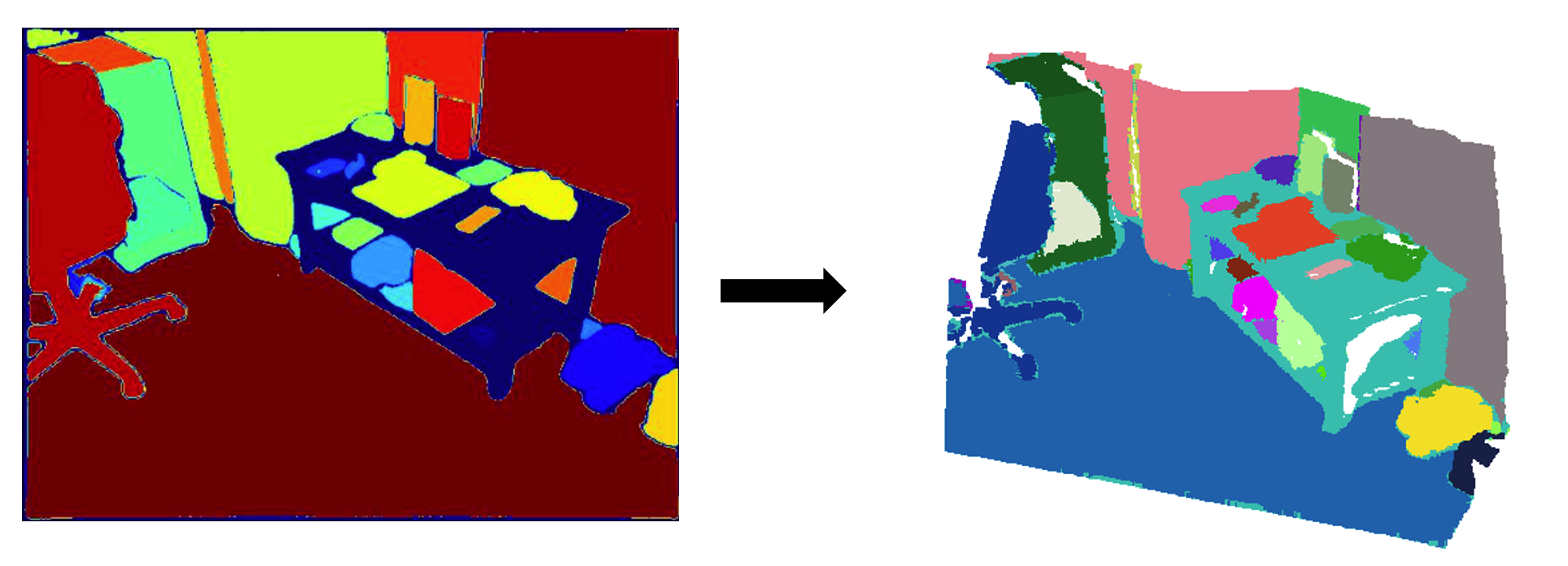
- SAM生成掩码
使用SAM在2D帧上获取分割掩码,然后通过深度信息将它们映射到3D空间。
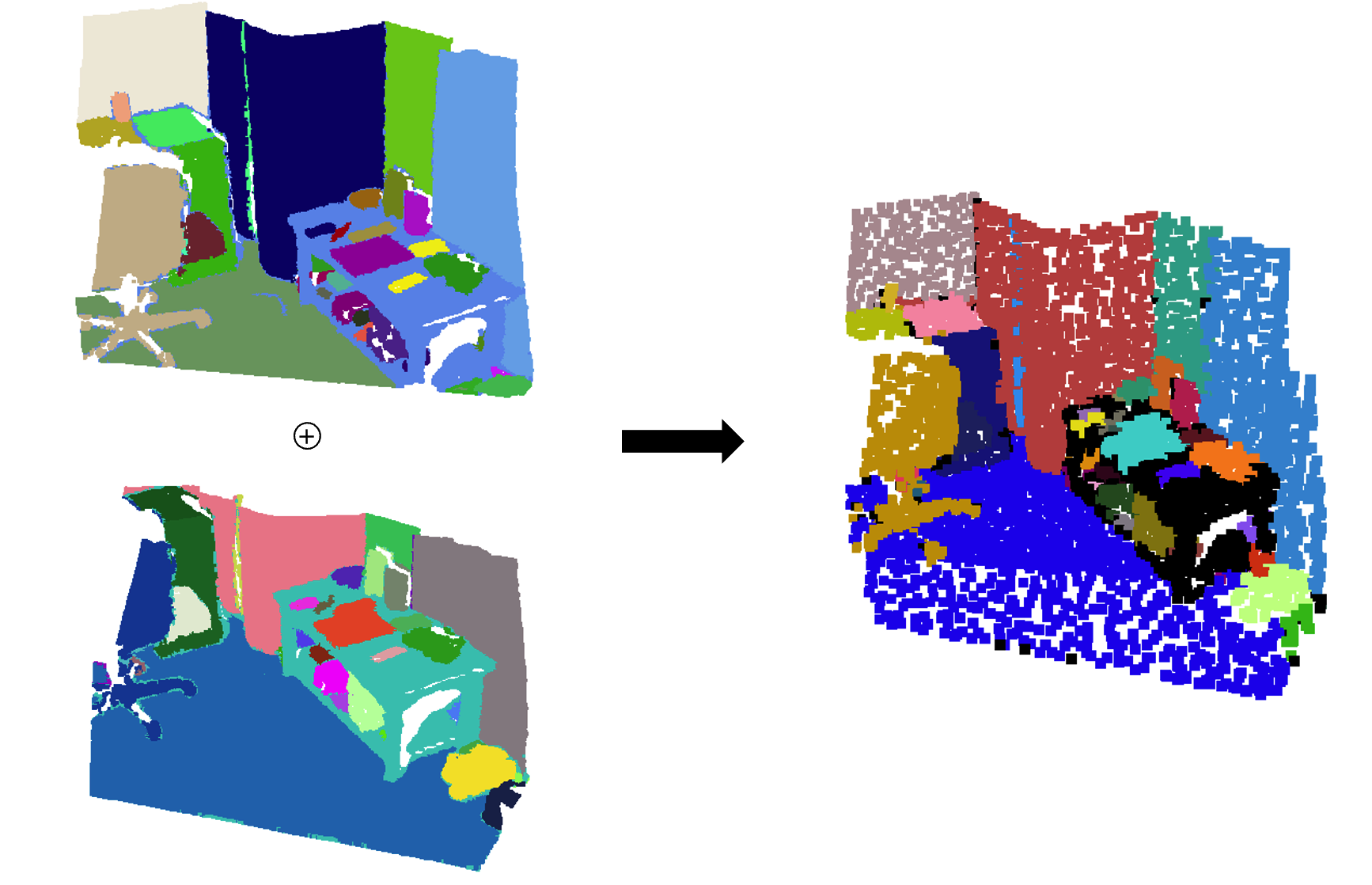
- 合并两个相邻的点云
使用"双向群组重叠算法"(修改自ContrastiveSceneContexts)合并两个相邻的点云。
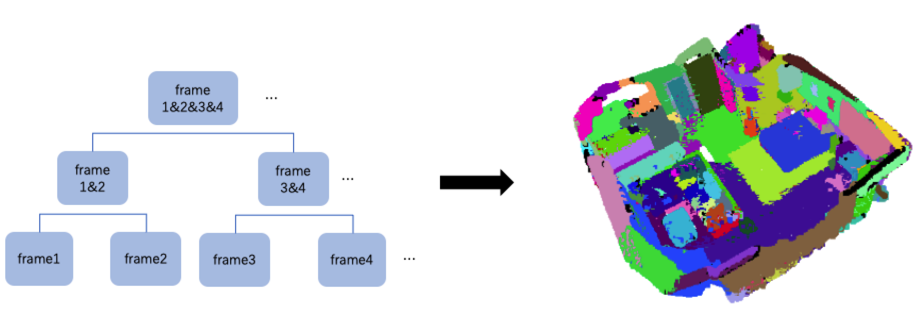
- 区域合并方法
通过区域合并方法合并整个点云。
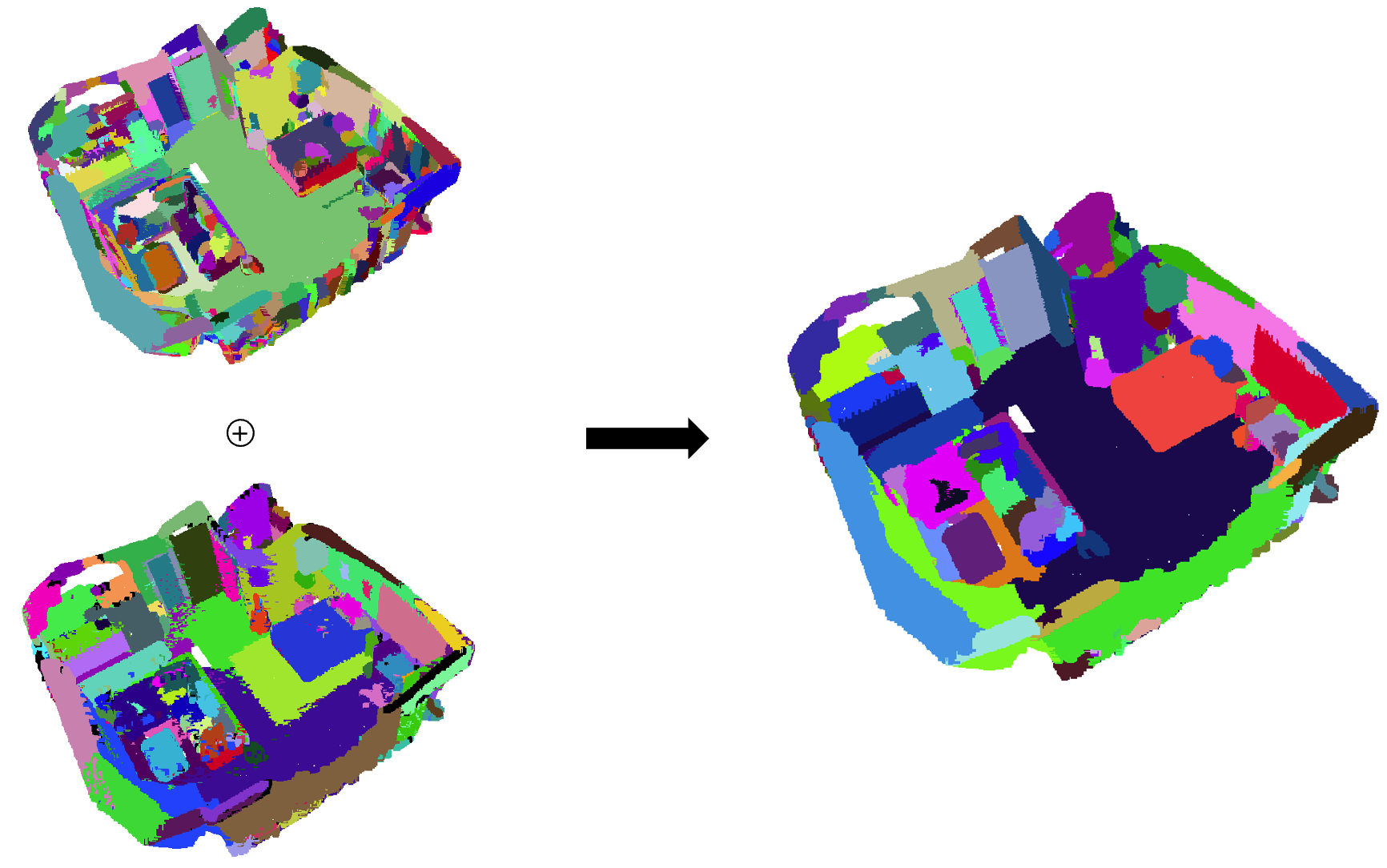
- 合并两个分割结果
我们使用默认参数对场景应用Felzenswalb和Huttenlocher的基于图的图像分割算法。详情请参考原始仓库。然后合并两个分割结果得到最终结果(合并代码在sam3d.py/pcd_ensemble中)。
引用
如果您发现_SAM3D_对您的研究有用,请引用我们的工作:
@misc{yang2023sam3d,
title={SAM3D: Segment Anything in 3D Scenes},
author={Yunhan Yang, Xiaoyang Wu, Tong He, Hengshuang Zhao and Xihui Liu},
year={2023},
eprint={2306.03908},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
致谢
SAM3D受以下仓库的启发:Segment Anything、Pointcept、BPNet、ContrastiveSceneContexts。











