
 访问官网
访问官网 Github
Github 论文
论文
MultiPLY:3D世界中的多感官物体中心化 具身大语言模型
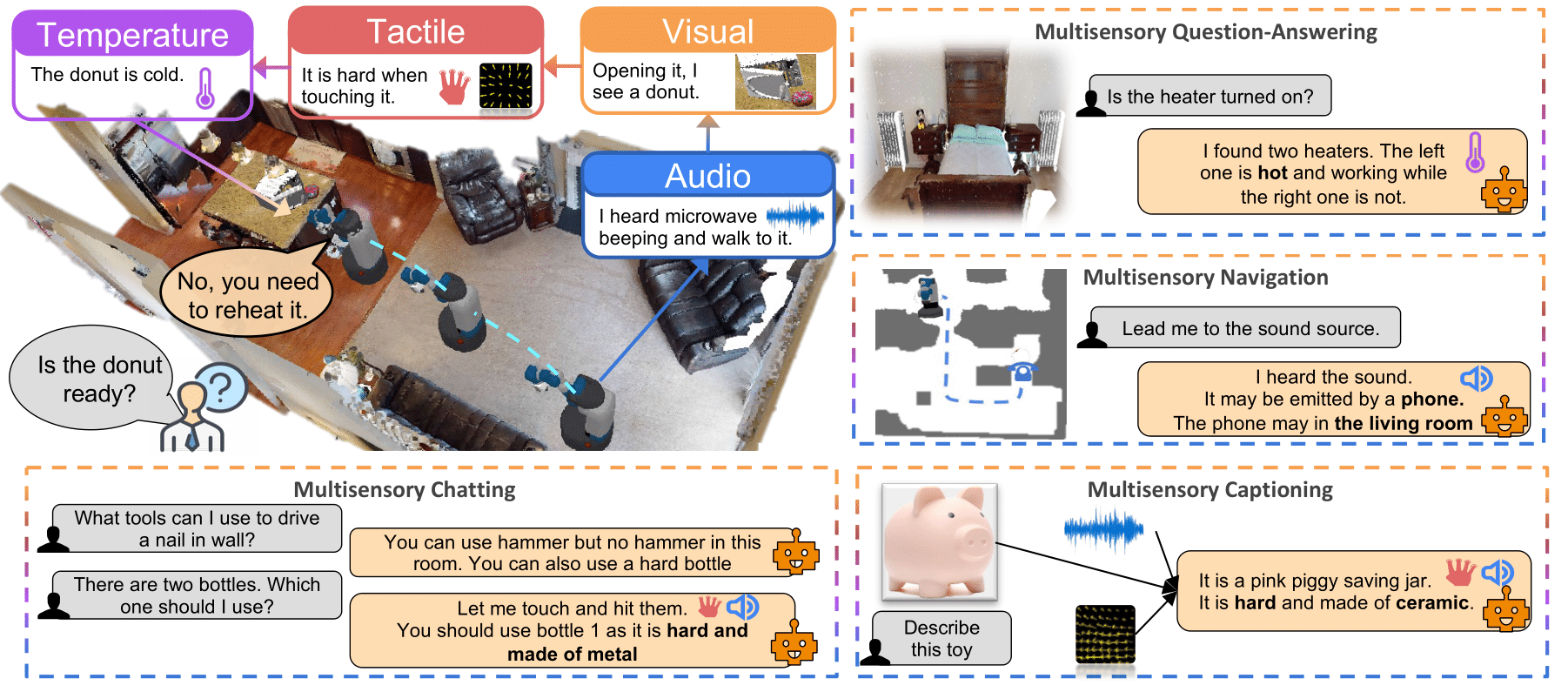
MultiPLY是一个多感官具身大语言模型,能够主动与3D环境中的物体交互并动态收集其多感官信息。它能够将多感官交互数据(包括视觉、听觉、触觉和热感信息)整合到大语言模型中,从而建立单词、动作和感知之间的关联。
方法
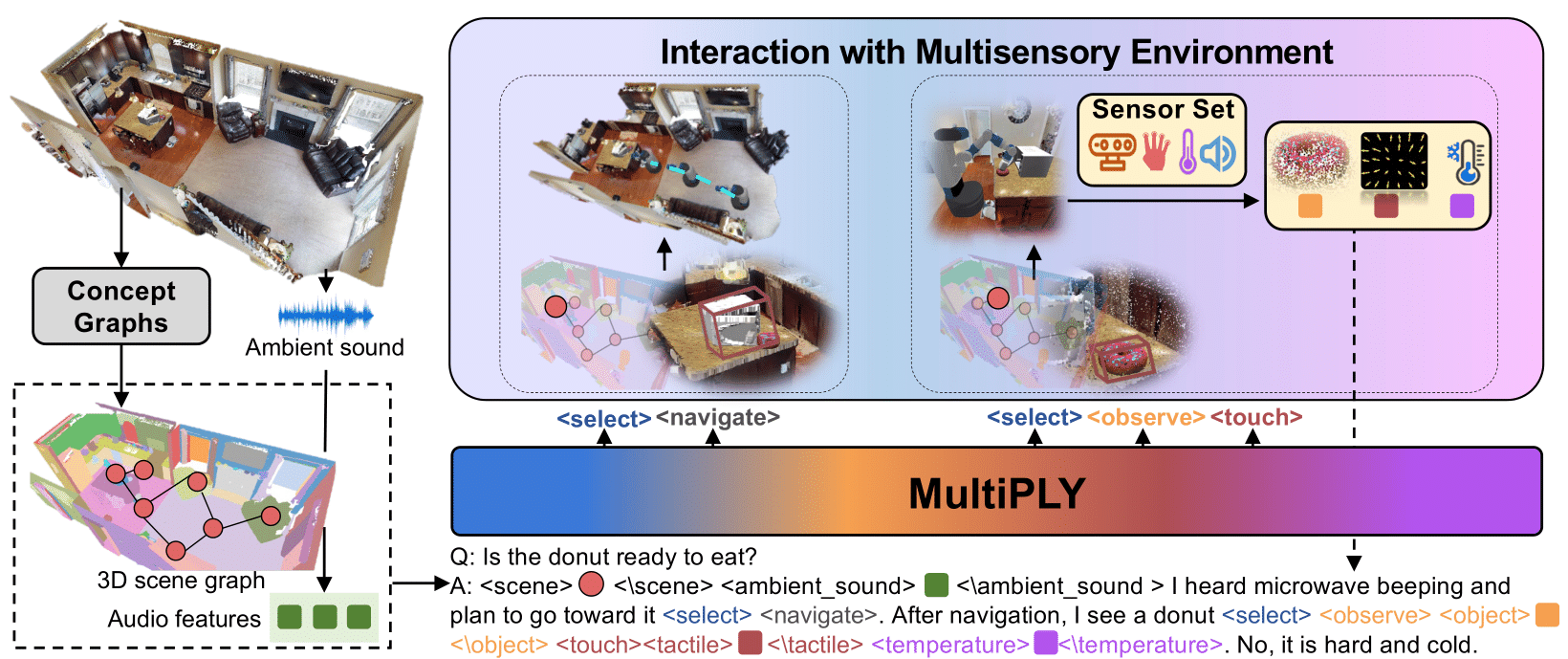
我们首先将场景编码为抽象的以物体为中心的表示,而物体的多感官细节只有在代理执行动作并与之交互时才会揭示。我们设计了一组动作标记,表示代理与环境交互的动作。交互结果通过状态标记被附加回大语言模型。
要求
待完成
训练
我们使用FSDP训练。在不同的集群上可能会有所不同。以下是在训练集群上的一个示例:
RANDOM=$$
DIV=1000
OFFSET=24000
MASTER_PORT=$(($RANDOM%$DIV+$OFFSET))
export OMP_NUM_THREADS=1
export TOKENIZERS_PARALLELISM=true
NODE_RANK=${SLURM_PROCID}
SLURM=${SLURM_NODELIST:0:3}
ip=${SLURM}${SLURM_NODELIST:4:2}
# 运行训练脚本
NUM_GPUS_PER_NODE=${1:-8}
echo $NUM_GPUS_PER_NODE
NUM_NODES=${2:-1}
CMD="torchrun --nnodes=$NUM_NODES --nproc_per_node=$NUM_GPUS_PER_NODE --master_addr=$ip --node_rank=$NODE_RANK"
$CMD \
fsdp_train.py --folder retrieval_attention3 --num_epochs=1000
数据集整理
待完成
引用
@article{multiply,
author = {Hong, Yining and Zheng, Zishuo and Chen, Peihao and Wang, Yian and Li, Junyan and Chen, Zhenfang and Gan, Chuang},
title = {MultiPLY: A Multisensory Object-Centric Embodied Large Language Model in 3D World},
journal = {arXiv},
year = {2024},
}











