
 访问官网
访问官网 Github
Github 论文
论文
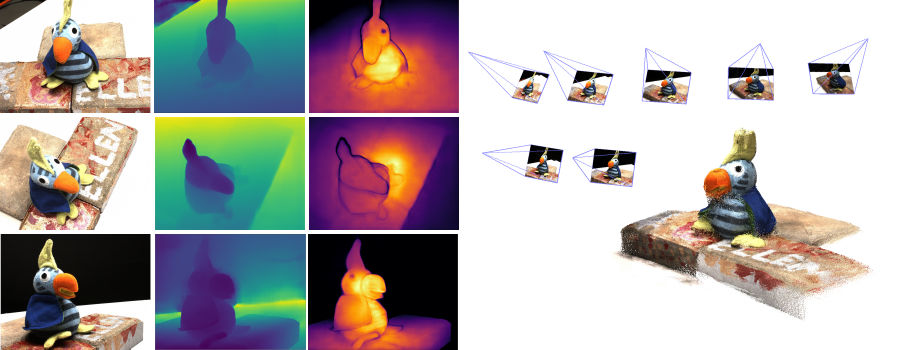
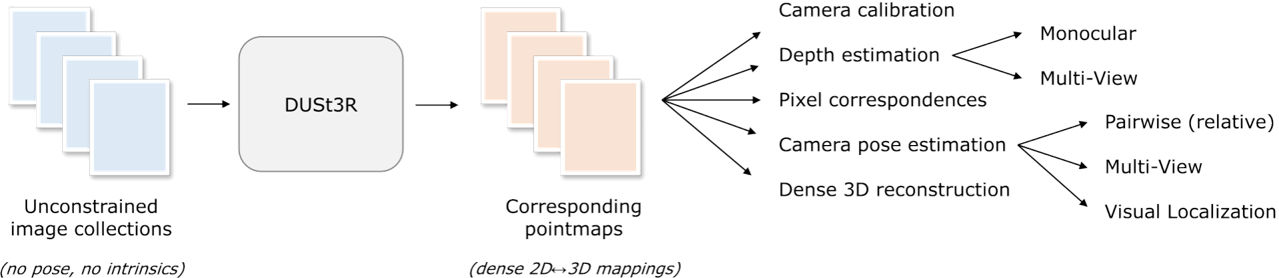
DUSt3R:简化几何3D视觉的官方实现
[项目页面], [DUSt3R arxiv]
请务必查看MASt3R:我们的新模型具有局部特征头、度量点图和更可扩展的全局对齐!
@inproceedings{dust3r_cvpr24,
title={DUSt3R: Geometric 3D Vision Made Easy},
author={Shuzhe Wang and Vincent Leroy and Yohann Cabon and Boris Chidlovskii and Jerome Revaud},
booktitle = {CVPR},
year = {2024}
}
@misc{dust3r_arxiv23,
title={DUSt3R: Geometric 3D Vision Made Easy},
author={Shuzhe Wang and Vincent Leroy and Yohann Cabon and Boris Chidlovskii and Jerome Revaud},
year={2023},
eprint={2312.14132},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
目录
许可证
该代码根据CC BY-NC-SA 4.0许可证分发。 有关更多信息,请参阅LICENSE。
# Copyright (C) 2024-present Naver Corporation. All rights reserved.
# Licensed under CC BY-NC-SA 4.0 (non-commercial use only).
入门
安装
- 克隆DUSt3R。
git clone --recursive https://github.com/naver/dust3r
cd dust3r
# 如果你已经克隆了dust3r:
# git submodule update --init --recursive
- 创建环境,这里我们展示使用conda的示例。
conda create -n dust3r python=3.11 cmake=3.14.0
conda activate dust3r
conda install pytorch torchvision pytorch-cuda=12.1 -c pytorch -c nvidia # 为你的系统使用正确版本的cuda
pip install -r requirements.txt
# 可选:你还可以安装额外的包来:
# - 添加对HEIC图像的支持
# - 添加pyrender,用于渲染某些数据集预处理中的深度图
# - 添加visloc.py所需的包
pip install -r requirements_optional.txt
- 可选,编译RoPE的cuda内核(如CroCo v2中所示)。
# DUST3R依赖RoPE位置嵌入,你可以为此编译一些cuda内核以提高运行速度。
cd croco/models/curope/
python setup.py build_ext --inplace
cd ../../../
检查点
你可以通过两种方式获取检查点:
-
你可以使用我们的huggingface_hub集成:模型将自动下载。
-
否则,我们提供了几个预训练模型:
| 模型名称 | 训练分辨率 | 头部 | 编码器 | 解码器 |
|---|---|---|---|---|
DUSt3R_ViTLarge_BaseDecoder_224_linear.pth | 224x224 | 线性 | ViT-L | ViT-B |
DUSt3R_ViTLarge_BaseDecoder_512_linear.pth | 512x384, 512x336, 512x288, 512x256, 512x160 | 线性 | ViT-L | ViT-B |
DUSt3R_ViTLarge_BaseDecoder_512_dpt.pth | 512x384, 512x336, 512x288, 512x256, 512x160 | DPT | ViT-L | ViT-B |
你可以在部分:我们的超参数中查看我们用于训练这些模型的超参数
要下载特定模型,例如DUSt3R_ViTLarge_BaseDecoder_512_dpt.pth:
mkdir -p checkpoints/
wget https://download.europe.naverlabs.com/ComputerVision/DUSt3R/DUSt3R_ViTLarge_BaseDecoder_512_dpt.pth -P checkpoints/
对于检查点,请确保同意我们使用的所有公共训练数据集和基础检查点的许可协议,以及CC-BY-NC-SA 4.0。再次说明,有关详细信息,请参见部分:我们的超参数。
交互式演示
在这个演示中,你应该能够在你的机器上运行DUSt3R来重建场景。 首先选择描述同一场景的图像。
你可以调整全局对齐计划及其迭代次数。
[!注意] 如果你选择了一张或两张图像,全局对齐程序将被跳过(模式=GlobalAlignerMode.PairViewer)
点击"运行"并等待。 当全局对齐结束时,重建结果会出现。 使用滑块"min_conf_thr"来显示或移除低置信度区域。
python3 demo.py --model_name DUSt3R_ViTLarge_BaseDecoder_512_dpt
# 使用--weights从本地文件加载检查点,例如 --weights checkpoints/DUSt3R_ViTLarge_BaseDecoder_512_dpt.pth
# 使用--image_size为所选检查点选择正确的分辨率。512(默认)或224
# 使用--local_network使其在本地网络上可访问,或使用--server_name手动指定url
# 使用--server_port更改端口,默认情况下它将从7860开始搜索可用端口
# 使用--device使用不同的设备,默认为"cuda"
使用Docker的交互式演示
要使用Docker运行DUSt3R(包括NVIDIA CUDA支持),请按照以下说明操作:
-
安装Docker:如果尚未安装,请从Docker网站下载并安装
docker和docker compose。 -
安装NVIDIA Docker工具包:为了支持GPU,请从Nvidia网站安装NVIDIA Docker工具包。
-
构建Docker镜像并运行:进入
./docker目录并运行以下命令:
cd docker
bash run.sh --with-cuda --model_name="DUSt3R_ViTLarge_BaseDecoder_512_dpt"
或者如果你想在没有CUDA支持的情况下运行演示,运行以下命令:
cd docker
bash run.sh --model_name="DUSt3R_ViTLarge_BaseDecoder_512_dpt"
默认情况下,demo.py以--local_network选项启动。
访问http://localhost:7860/以访问Web UI(或用机器名替换localhost以从网络访问)。
run.sh将使用docker-compose-cuda.yml或docker-compose-cpu.yml配置文件启动docker-compose,然后使用entrypoint.sh启动演示。

使用方法
from dust3r.inference import inference
from dust3r.model import AsymmetricCroCo3DStereo
from dust3r.utils.image import load_images
from dust3r.image_pairs import make_pairs
from dust3r.cloud_opt import global_aligner, GlobalAlignerMode
if __name__ == '__main__':
device = 'cuda'
batch_size = 1
schedule = 'cosine'
lr = 0.01
niter = 300
model_name = "naver/DUSt3R_ViTLarge_BaseDecoder_512_dpt"
# 如果需要,你可以在model_name中放置本地检查点的路径
model = AsymmetricCroCo3DStereo.from_pretrained(model_name).to(device)
# load_images可以接受图像列表或目录
images = load_images(['croco/assets/Chateau1.png', 'croco/assets/Chateau2.png'], size=512)
pairs = make_pairs(images, scene_graph='complete', prefilter=None, symmetrize=True)
output = inference(pairs, model, device, batch_size=batch_size)
# 在这个阶段,你已经得到了原始的dust3r预测结果
view1, pred1 = output['view1'], output['pred1']
view2, pred2 = output['view2'], output['pred2']
# 这里,view1、pred1、view2、pred2是长度为2的列表字典
# -> 因为我们对称化了(im1, im2)和(im2, im1)对
# 在每个视图中你有:
# 一个整数图像标识符: view1['idx'] 和 view2['idx']
# 图像: view1['img'] 和 view2['img']
# 图像形状: view1['true_shape'] 和 view2['true_shape']
# 数据加载器输出的实例字符串: view1['instance'] 和 view2['instance']
# pred1 和 pred2 包含置信度值: pred1['conf'] 和 pred2['conf']
# pred1 包含 view1['img'] 空间中 view1['img'] 的3D点: pred1['pts3d']
# pred2 包含 view1['img'] 空间中 view2['img'] 的3D点: pred2['pts3d_in_other_view']
# 接下来我们将使用global_aligner来对齐预测结果
# 根据你的任务,你可能对原始输出就满意了,不需要这一步
# 只有两个输入图像时,你可以使用GlobalAlignerMode.PairViewer: 它只会转换输出
# 如果使用GlobalAlignerMode.PairViewer,不需要运行compute_global_alignment
scene = global_aligner(output, device=device, mode=GlobalAlignerMode.PointCloudOptimizer)
loss = scene.compute_global_alignment(init="mst", niter=niter, schedule=schedule, lr=lr)
# 从场景中检索有用的值:
imgs = scene.imgs
focals = scene.get_focals()
poses = scene.get_im_poses()
pts3d = scene.get_pts3d()
confidence_masks = scene.get_masks()
# 可视化重建结果
scene.show()
# 在两张图像之间找到2D-2D匹配
from dust3r.utils.geometry import find_reciprocal_matches, xy_grid
pts2d_list, pts3d_list = [], []
for i in range(2):
conf_i = confidence_masks[i].cpu().numpy()
pts2d_list.append(xy_grid(*imgs[i].shape[:2][::-1])[conf_i]) # imgs[i].shape[:2] = (H, W)
pts3d_list.append(pts3d[i].detach().cpu().numpy()[conf_i])
reciprocal_in_P2, nn2_in_P1, num_matches = find_reciprocal_matches(*pts3d_list)
print(f'找到 {num_matches} 个匹配')
matches_im1 = pts2d_list[1][reciprocal_in_P2]
matches_im0 = pts2d_list[0][nn2_in_P1][reciprocal_in_P2]
# 可视化几个匹配
import numpy as np
from matplotlib import pyplot as pl
n_viz = 10
match_idx_to_viz = np.round(np.linspace(0, num_matches-1, n_viz)).astype(int)
viz_matches_im0, viz_matches_im1 = matches_im0[match_idx_to_viz], matches_im1[match_idx_to_viz]
H0, W0, H1, W1 = *imgs[0].shape[:2], *imgs[1].shape[:2]
img0 = np.pad(imgs[0], ((0, max(H1 - H0, 0)), (0, 0), (0, 0)), 'constant', constant_values=0)
img1 = np.pad(imgs[1], ((0, max(H0 - H1, 0)), (0, 0), (0, 0)), 'constant', constant_values=0)
img = np.concatenate((img0, img1), axis=1)
pl.figure()
pl.imshow(img)
cmap = pl.get_cmap('jet')
for i in range(n_viz):
(x0, y0), (x1, y1) = viz_matches_im0[i].T, viz_matches_im1[i].T
pl.plot([x0, x1 + W0], [y0, y1], '-+', color=cmap(i / (n_viz - 1)), scalex=False, scaley=False)
pl.show(block=True)

训练
在本节中,我们将展示一个简短的演示,以开始训练DUSt3R。
数据集
目前,我们添加了以下训练数据集:
- CO3Dv2 - 知识共享署名-非商业性使用 4.0 国际许可协议
- ARKitScenes - 知识共享署名-非商业性使用-相同方式共享 4.0
- ScanNet++ - 非商业研究和教育目的
- BlendedMVS - 知识共享署名 4.0 国际许可协议
- WayMo开放数据集 - 非商业用途
- Habitat-Sim
- MegaDepth
- StaticThings3D
- WildRGB-D
对于每个数据集,我们在datasets_preprocess目录中提供了一个预处理脚本,并在需要时提供了包含图像对列表的压缩包。
你需要自行从官方源下载数据集,同意其许可协议,下载我们的图像对列表,并运行预处理脚本。
链接:
ARKitScenes图像对
ScanNet++图像对
BlendedMVS图像对
WayMo开放数据集图像对
Habitat元数据
MegaDepth图像对
StaticThings3D图像对
[!注意] 它们与用于训练DUSt3R的内容并不完全相同,但应该足够接近。
演示
对于这个训练演示,我们将下载并准备CO3Dv2的一个子集 - 知识共享署名-非商业性使用 4.0 国际许可协议,并在其上启动训练代码。 演示模型将在一个非常小的数据集上训练几个epoch。 它的效果不会很好。
# 下载并准备co3d子集
mkdir -p data/co3d_subset
cd data/co3d_subset
git clone https://github.com/facebookresearch/co3d
cd co3d
python3 ./co3d/download_dataset.py --download_folder ../ --single_sequence_subset
rm ../*.zip
cd ../../..
python3 datasets_preprocess/preprocess_co3d.py --co3d_dir data/co3d_subset --output_dir data/co3d_subset_processed --single_sequence_subset
# 下载预训练的croco v2检查点
mkdir -p checkpoints/
wget https://download.europe.naverlabs.com/ComputerVision/CroCo/CroCo_V2_ViTLarge_BaseDecoder.pth -P checkpoints/
# dust3r的训练分为3个步骤。
# 在这个示例中,我们会减少训练轮数。关于我们在论文中使用的实际超参数,请参见下一节:"我们的超参数"
# 步骤1 - 训练224分辨率的dust3r
torchrun --nproc_per_node=4 train.py \
--train_dataset "1000 @ Co3d(split='train', ROOT='data/co3d_subset_processed', aug_crop=16, mask_bg='rand', resolution=224, transform=ColorJitter)" \
--test_dataset "100 @ Co3d(split='test', ROOT='data/co3d_subset_processed', resolution=224, seed=777)" \
--model "AsymmetricCroCo3DStereo(pos_embed='RoPE100', img_size=(224, 224), head_type='linear', output_mode='pts3d', depth_mode=('exp', -inf, inf), conf_mode=('exp', 1, inf), enc_embed_dim=1024, enc_depth=24, enc_num_heads=16, dec_embed_dim=768, dec_depth=12, dec_num_heads=12)" \
--train_criterion "ConfLoss(Regr3D(L21, norm_mode='avg_dis'), alpha=0.2)" \
--test_criterion "Regr3D_ScaleShiftInv(L21, gt_scale=True)" \
--pretrained "checkpoints/CroCo_V2_ViTLarge_BaseDecoder.pth" \
--lr 0.0001 --min_lr 1e-06 --warmup_epochs 1 --epochs 10 --batch_size 16 --accum_iter 1 \
--save_freq 1 --keep_freq 5 --eval_freq 1 \
--output_dir "checkpoints/dust3r_demo_224"
# 步骤2 - 训练512分辨率的dust3r
torchrun --nproc_per_node=4 train.py \
--train_dataset "1000 @ Co3d(split='train', ROOT='data/co3d_subset_processed', aug_crop=16, mask_bg='rand', resolution=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], transform=ColorJitter)" \
--test_dataset "100 @ Co3d(split='test', ROOT='data/co3d_subset_processed', resolution=(512,384), seed=777)" \
--model "AsymmetricCroCo3DStereo(pos_embed='RoPE100', patch_embed_cls='ManyAR_PatchEmbed', img_size=(512, 512), head_type='linear', output_mode='pts3d', depth_mode=('exp', -inf, inf), conf_mode=('exp', 1, inf), enc_embed_dim=1024, enc_depth=24, enc_num_heads=16, dec_embed_dim=768, dec_depth=12, dec_num_heads=12)" \
--train_criterion "ConfLoss(Regr3D(L21, norm_mode='avg_dis'), alpha=0.2)" \
--test_criterion "Regr3D_ScaleShiftInv(L21, gt_scale=True)" \
--pretrained "checkpoints/dust3r_demo_224/checkpoint-best.pth" \
--lr 0.0001 --min_lr 1e-06 --warmup_epochs 1 --epochs 10 --batch_size 4 --accum_iter 4 \
--save_freq 1 --keep_freq 5 --eval_freq 1 \
--output_dir "checkpoints/dust3r_demo_512"
# 步骤3 - 使用dpt训练512分辨率的dust3r
torchrun --nproc_per_node=4 train.py \
--train_dataset "1000 @ Co3d(split='train', ROOT='data/co3d_subset_processed', aug_crop=16, mask_bg='rand', resolution=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], transform=ColorJitter)" \
--test_dataset "100 @ Co3d(split='test', ROOT='data/co3d_subset_processed', resolution=(512,384), seed=777)" \
--model "AsymmetricCroCo3DStereo(pos_embed='RoPE100', patch_embed_cls='ManyAR_PatchEmbed', img_size=(512, 512), head_type='dpt', output_mode='pts3d', depth_mode=('exp', -inf, inf), conf_mode=('exp', 1, inf), enc_embed_dim=1024, enc_depth=24, enc_num_heads=16, dec_embed_dim=768, dec_depth=12, dec_num_heads=12)" \
--train_criterion "ConfLoss(Regr3D(L21, norm_mode='avg_dis'), alpha=0.2)" \
--test_criterion "Regr3D_ScaleShiftInv(L21, gt_scale=True)" \
--pretrained "checkpoints/dust3r_demo_512/checkpoint-best.pth" \
--lr 0.0001 --min_lr 1e-06 --warmup_epochs 1 --epochs 10 --batch_size 2 --accum_iter 8 \
--save_freq 1 --keep_freq 5 --eval_freq 1 --disable_cudnn_benchmark \
--output_dir "checkpoints/dust3r_demo_512dpt"
我们的超参数
以下是我们用于训练模型的命令:
# 注意:数据集的ROOT路径已省略
# 224 线性模型
torchrun --nproc_per_node 8 train.py \
--train_dataset=" + 100_000 @ Habitat(1_000_000, split='train', aug_crop=16, resolution=224, transform=ColorJitter) + 100_000 @ BlendedMVS(split='train', aug_crop=16, resolution=224, transform=ColorJitter) + 100_000 @ MegaDepth(split='train', aug_crop=16, resolution=224, transform=ColorJitter) + 100_000 @ ARKitScenes(aug_crop=256, resolution=224, transform=ColorJitter) + 100_000 @ Co3d(split='train', aug_crop=16, mask_bg='rand', resolution=224, transform=ColorJitter) + 100_000 @ StaticThings3D(aug_crop=256, mask_bg='rand', resolution=224, transform=ColorJitter) + 100_000 @ ScanNetpp(split='train', aug_crop=256, resolution=224, transform=ColorJitter) + 100_000 @ InternalUnreleasedDataset(aug_crop=128, resolution=224, transform=ColorJitter) " \
--test_dataset=" Habitat(1_000, split='val', resolution=224, seed=777) + 1_000 @ BlendedMVS(split='val', resolution=224, seed=777) + 1_000 @ MegaDepth(split='val', resolution=224, seed=777) + 1_000 @ Co3d(split='test', mask_bg='rand', resolution=224, seed=777) " \
--train_criterion="ConfLoss(Regr3D(L21, norm_mode='avg_dis'), alpha=0.2)" \
--test_criterion="Regr3D_ScaleShiftInv(L21, gt_scale=True)" \
--model="AsymmetricCroCo3DStereo(pos_embed='RoPE100', img_size=(224, 224), head_type='linear', output_mode='pts3d', depth_mode=('exp', -inf, inf), conf_mode=('exp', 1, inf), enc_embed_dim=1024, enc_depth=24, enc_num_heads=16, dec_embed_dim=768, dec_depth=12, dec_num_heads=12)" \
--pretrained="checkpoints/CroCo_V2_ViTLarge_BaseDecoder.pth" \
--lr=0.0001 --min_lr=1e-06 --warmup_epochs=10 --epochs=100 --batch_size=16 --accum_iter=1 \
--save_freq=5 --keep_freq=10 --eval_freq=1 \
--output_dir="checkpoints/dust3r_224"
# 512 线性
torchrun --nproc_per_node 8 train.py \
--train_dataset=" + 10_000 @ Habitat(1_000_000, 分割='训练', 增强裁剪=16, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ BlendedMVS(分割='训练', 增强裁剪=16, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ MegaDepth(分割='训练', 增强裁剪=16, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ ARKitScenes(增强裁剪=256, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ Co3d(分割='训练', 增强裁剪=16, 背景遮罩='随机', 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ StaticThings3D(增强裁剪=256, 背景遮罩='随机', 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ ScanNetpp(分割='训练', 增强裁剪=256, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ 内部未发布数据集(增强裁剪=128, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) " \
--test_dataset=" Habitat(1_000, 分割='验证', 分辨率=(512,384), 随机种子=777) + 1_000 @ BlendedMVS(分割='验证', 分辨率=(512,384), 随机种子=777) + 1_000 @ MegaDepth(分割='验证', 分辨率=(512,336), 随机种子=777) + 1_000 @ Co3d(分割='测试', 分辨率=(512,384), 随机种子=777) " \
--train_criterion="置信度损失(三维回归(L21, 归一化模式='平均距离'), alpha=0.2)" \
--test_criterion="三维回归_尺度平移不变(L21, 真实尺度=True)" \
--model="非对称CroCo3D立体视觉(位置嵌入='RoPE100', 图像块嵌入类='多AR_图像块嵌入', 图像尺寸=(512, 512), 头部类型='线性', 输出模式='3D点', 深度模式=('指数', -inf, inf), 置信度模式=('指数', 1, inf), 编码器嵌入维度=1024, 编码器深度=24, 编码器头数=16, 解码器嵌入维度=768, 解码器深度=12, 解码器头数=12)" \
--pretrained="检查点/dust3r_224/最佳检查点.pth" \
--lr=0.0001 --min_lr=1e-06 --warmup_epochs=20 --epochs=100 --batch_size=4 --accum_iter=2 \
--save_freq=10 --keep_freq=10 --eval_freq=1 --print_freq=10 \
--output_dir="检查点/dust3r_512"
# 512 dpt
torchrun --nproc_per_node 8 train.py \
--train_dataset=" + 10_000 @ Habitat(1_000_000, 分割='训练', 增强裁剪=16, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ BlendedMVS(分割='训练', 增强裁剪=16, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ MegaDepth(分割='训练', 增强裁剪=16, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ ARKitScenes(增强裁剪=256, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ Co3d(分割='训练', 增强裁剪=16, 背景遮罩='随机', 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ StaticThings3D(增强裁剪=256, 背景遮罩='随机', 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ ScanNetpp(分割='训练', 增强裁剪=256, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) + 10_000 @ 内部未发布数据集(增强裁剪=128, 分辨率=[(512, 384), (512, 336), (512, 288), (512, 256), (512, 160)], 转换=颜色抖动) " \
--test_dataset=" Habitat(1_000, 分割='验证', 分辨率=(512,384), 随机种子=777) + 1_000 @ BlendedMVS(分割='验证', 分辨率=(512,384), 随机种子=777) + 1_000 @ MegaDepth(分割='验证', 分辨率=(512,336), 随机种子=777) + 1_000 @ Co3d(分割='测试', 分辨率=(512,384), 随机种子=777) " \
--train_criterion="置信度损失(三维回归(L21, 归一化模式='平均距离'), alpha=0.2)" \
--test_criterion="三维回归_尺度平移不变(L21, 真实尺度=True)" \
--model="非对称CroCo3D立体视觉(位置嵌入='RoPE100', 图像块嵌入类='多AR_图像块嵌入', 图像尺寸=(512, 512), 头部类型='dpt', 输出模式='3D点', 深度模式=('指数', -inf, inf), 置信度模式=('指数', 1, inf), 编码器嵌入维度=1024, 编码器深度=24, 编码器头数=16, 解码器嵌入维度=768, 解码器深度=12, 解码器头数=12)" \
--pretrained="检查点/dust3r_512/最佳检查点.pth" \
--lr=0.0001 --min_lr=1e-06 --warmup_epochs=15 --epochs=90 --batch_size=4 --accum_iter=2 \
--save_freq=5 --keep_freq=10 --eval_freq=1 --print_freq=10 --disable_cudnn_benchmark \
--output_dir="检查点/dust3r_512dpt"











